Altijd leuk, een Piper.
Heb het vermoeden dat het om een Piper van Carl Golberg gaat. Een uitstekend vliegend toestel. Heb er ook een, eigenlijk twee. Beide bijna 30 jaar oud en één hangt nog steeds ongebruikt aan de muur.
De Piper heeft altijd electrisch gevlogen. In het begin was dat een hele uitdaging. De ontwikkeling van goede motoren stond nog in de kinderschoenen. Er waren toen twee fabrikanten van goede borstelmotoren. Keller en Geist. Borstelloze motoren lagen toen nog ver achter de horizon.
In mijn Piper zat een Keller motor (ruim 300 gram zwaar) met een 10 x 6 prop en 16 Sanyo Ni-Cd cellen. Vliegen ging kantje boord. Voor een grondstart was de Keller niet sterk genoeg. Een handstart het liefst met flink wat wind. Dan had je een hogere startsnelheid. Maar een electrisch vliegende Piper met een spanwijdte van 2 meter was in die tijd toch wel bijzonder. De modelbouwfabriekanten hadden toen hoofdzakelijk kleine motormodellen en electrozwevers met 600 motoren zoals de Robbe Varta Fly.
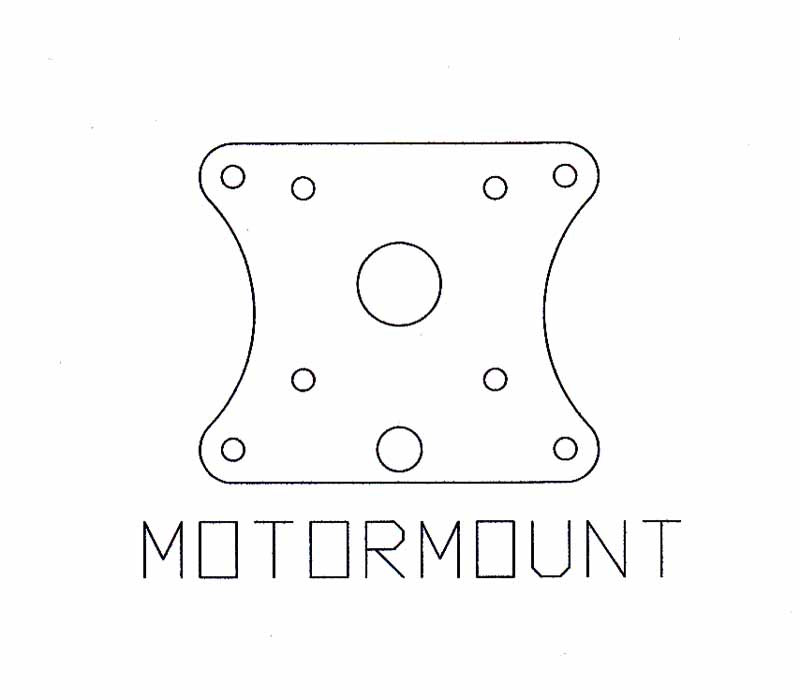
Een paar jaar geleden is de Keller motor vervangen door een Robbe Roxxy 4250/07 (bestelnummer 4781), voorzien van een 12 x 6 prop. Hoewel de motor een fractie kost van wat ooit de Keller heeft gekost, zijn de prestaties heel veel beter. De Robbe motor kan met een montagekruis worden gemonteerd (rugmontage). Dat kwam goed uit. De motor staat op een epoxie plaat (zie afbeelding) die met vier draadeinden en afstandhouders tegen het kopschot is geplaatst.
Zorg er wel voor dat dat kopschot goed vast zit. Lijm desnoods een paar extra driekantlijsten tussen het kopschot en de zij- en onderkanten en dan liefst aan beide zijnen van het kopschot. Zo weet je (bijna) zeker dat de motor er niet af komt.
Heb nog overwogen in plaats van de Robbe motor een Kontronik Kira te kopen. Met Kontronik motoren heb ik goede ervaringen. Zo is het rendement veel beter. Bij dezelfde prestaties dus een lager stroomverbruik. Maar de veel hogere prijs én de onduidelijkheid of rugmontage mogelijk was, hebben me daar toch van af laten zien.
Voor de stroomvoorziening worden 6 stuks A123 cellen met een capaciteit van 2300 mAh gebruikt. Maximaal stroomverbruik rond de 40 ampère bij een toerental van 9600 rpm. Bij gewoon vlak vliegen is het stroomverbruik rond de 10 ampère. Vermogen genoeg voor een grondstart en een stevige klim.
Het laatste twee jaar gebruik ik een Castel Creations Ice Lite 75. Een voor mijn doel meer dan uitstekende regelaar. Van de BEC in de ESC maak ik geen gebruik. Ben bij grotere toestellen geen voorstander van het gebruik van de in de ESC inbebouwde BEC's en zeker niet van de schakelende exemplaren wegens de kans op storingen.
Bij een eventueel probleem in de stroomvoorziening door de vliegaccu ben je meteen de besturing kwijt...
Als ontvanger- servo- en telemetrievoeding gebruik ik een kleine 2 cellige Li-Po met een analoge BEC van Robbe. Dat werkt probleemloos.
Sinds een paar weken vliegt de Piper ook met een 5 cellen Li-Po met een capaciteit van 3300 mAh. Het gewicht van Li-Po's is de laatste jaren wat gedaald. Dit 3300 mAh pakket is iets lichter dan 6 A123 cellen met een capaciteit van 2300 mAh, maar toch niet helemaal vergelijkbaar. A123 cellen kan je verder leeg vliegen dan Li-Po cellen, waar je bij voorkeur 20% van de capacitein in laat zitten.
Met dit Li-Po pakket is de aandrijving nog krachtiger. Een Li-Po met 5 cellen geeft een iets hogere spanning dan 6 cellen A123. Het maxmale stroomverbruik loopt op naar ongeveer 47 ampère en het toerental met de 12 x 6 prop tot 11000 toeren. Of anders gezegd, bijna 1000 watt vermogen voor een toestel met een gewicht van rond de 3 kilogram. Dat is meer dan 300 watt per kilogram!
Omdat het stroomverbruik sterk afhankelijk is van de vliegstijl, is de ladingstoestand van de accu en dus de maximale vliegduur, lastig in te schatten. En omdat je met een toestel dat rond de drie kilo weegt niet zonder motorvermogen wilt komen te zitten raad ik je sterk aan om de ladingstoestand van de aandrijfaccu tijdens de vlucht te monitoren. Zelf gebruik ik hiervoor een Simprop VT-1 telemetrieset met een zelfgebouwde stroomsensor en ook zelf ontwikkelde software met spraakuitgave. Maar een eenvoudige Quanum met een stroomsensorbordje voldoet ook al. In de nieuwste softwareversie kan je zelfs een waarschuwingsniveau voor de verbruikte capaciteit instellen. Als die capaciteit wordt bereikt gaat de Quanum piepen en weet je dat het tijd wordt om te landen. Maar ook veel fabrikanten van radiobesturing bieden tegenwoordig een telemetrie-optie aan.
Tot slot,
In Nistelrode wordt jaarlijks een Pipermeeting gehouden. Het bezit van een mooie Piper is een goede reden om daar volgend jaar naar toe te komen!
Veel plezier met je Piper en misschien zien we je volgend jaar bij de Wings in Nistelrode tijdens de Pipermeeting!
\


")

