Sinds afgelopen zomer ben ik begonnen met helikopter vliegen. In een ander draadje op dit forum staat het hele verhaal hoe ik van een Coaxiale heli ben overgestapt naar een HK500GT.
Afgelopen jaar ben ik naar de RCHeliparts Schaalmeeting 2010 geweest in Hulten en toen is het virus pas echt toegeslagen. Om nu de stap niet direkt te groot en te kostbaar te maken heb ik besloten om een schaalmodel te gaan maken van beperkt formaat en die past bij mijn beurs.Op deze schaalmeeting was Fred Coenen ook vertegenwoordigd met een tweetal Alouette III heli’s en die spraken mij enorm aan als model. Ten eerste je ziet ze bijna niet als schaalheli, waardoor ze uniek blijven, en ten tweede het is een nostalgisch model. Het moest de Alouette III worden in de Grasshoppers uitvoering.


Nou zat ik in die tijd veelvuldig op het Modelbouwforum te speuren en viel mijn oog op een advertentie van “Bone” (Rob). Hij bood een Panther en een schaalromp aan voor een Alouette III. Deze werden als combi aangeboden maar na wat heen en weer gemail kon ik de romp toch van Rob overnemen. Zo gezegd zo gedaan.

Dit is alleen de romp en dan begint het pas. Het gehele binnenwerk en landingsgestel moet zelf worden gemaakt aan de hand van een tekening. Dit zal een aardige klus worden maar ik ga deze uitdaging graag aan. Daarnaast was het de vraag wat voor mechaniek ga ik gebruiken. Met Albertino Doomen vaak gesproken over wat ik het beste kan doen, gezien mijn eis dat ik geen Nitro wil en Turbine te hoog gegrepen is , moest het een electro heli gaan worden.
Blijven er al een stuk minder opties over. Als mogelijke mechanieken kwamen langs de Trex 600 , Thunder Tiger Raptor E620 SE of een Vario Skyfox.
Momenteel worden de Skyfoxen best veel aangeboden op o.a. Ebay in Duitsland omdat er op veel plaatsen niet meer met Nitro gevlogen mag worden. Aangezien mijn vliegmaat “Bruteforce” zelf ook een electro Star Ranger met Vario hangmechaniek heeft en hierover enorm goed te spreken is vanwege de degelijkheid en kwaliteit ben ik ook maar eens gaan zoeken naar gebruikte Vario heli’s.
Op het Modelbouwforum liep ik plots tegen een advertentie aan van “Qibis” die een Skyfox aanbood. Uiteindelijk heb ik deze van hem gekocht zonder motor omdat ik hem wil ombouwen naar electro.

Nu kon er begonnen worden met de ombouw naar electro. Op verschillende plaatsen op internet worden ombouwsets aangeboden om dit te doen. Tevens is er een ombouwset te koop bij Vario alleen vind ik deze te kostbaar en tevens betreft dit een ombouwset met een tandwiel overbrenging.
De ervaringen van Bruteforce leerde dat een directe tandwieloverbrenging nogal wat trillingen en overbrengingsgeluiden met zich meebrengt. Het was verstandiger om een riem te gebruiken voor de primaire overbrenging. Ten eerste is dit goedkoper dan de set van Vario en ten tweede zijn de trillingen en overbrenging geluiden gereduceerd.
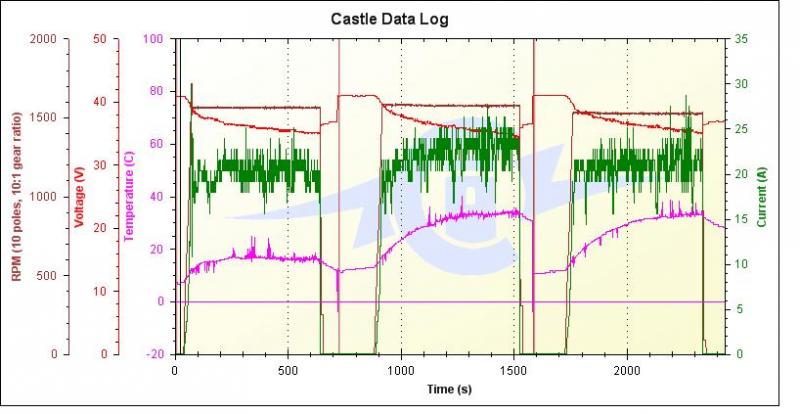
De vraag was eerst natuurlijk welke motor gaan we gebruiken en op hoeveel cellen gaan we vliegen. Samen met Bruteforce hierover gesproken en we kwamen tot de conclusie dat we een berekening gaan maken op basis van een 10S setup met een ALIGN RCM BL700M motor, want die had ik al voor een zacht prijsje bemachtigd.
Het gewenste rotortoerental moet tussen de 1300 en max 1600 rpm (aanbevolen door Vario) liggen en de overbrenging in de skyfox is 4:1.
Dit betekent dat het hoofd aandrijfwiel een toerental moet draaien tussen de 5200 en 6400 rpm.
De ALIGN RCM BL700M is een 510KV motor.
Bij 10S hebben wij 35V *80% (throttle)= 28V* 510= 14280 rpm
We moeten naar een gemiddelde van 5800 rpm dit betekent een reductie van ongeveer 2,46 : 1
Als we nu een hoofdtandwiel monteren van 35 tanden en een motor pinion van 15 tanden dan hebben we een verhouding die we kunnen gebruiken van 2,3 : 1. In totaal levert dit dus een reductie op van 2,3*4= 9,3:1. Omdat we aan standaard tandriem wielen vastzitten kunnen we niet op de exacte overbrenging verhouding uit komen die gewenst is. Nu zouden we met een 80% throttle uitkomen op 1535 rpm dus zitten aan de veilige kant.
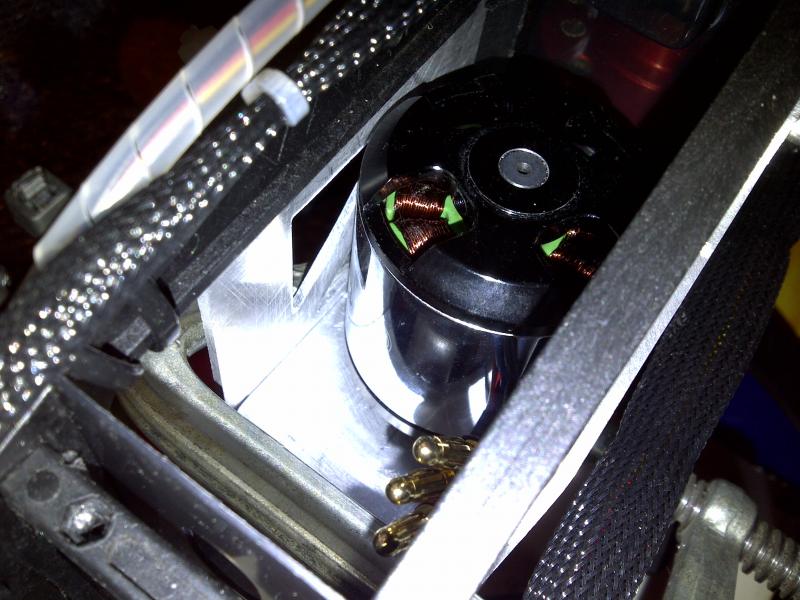
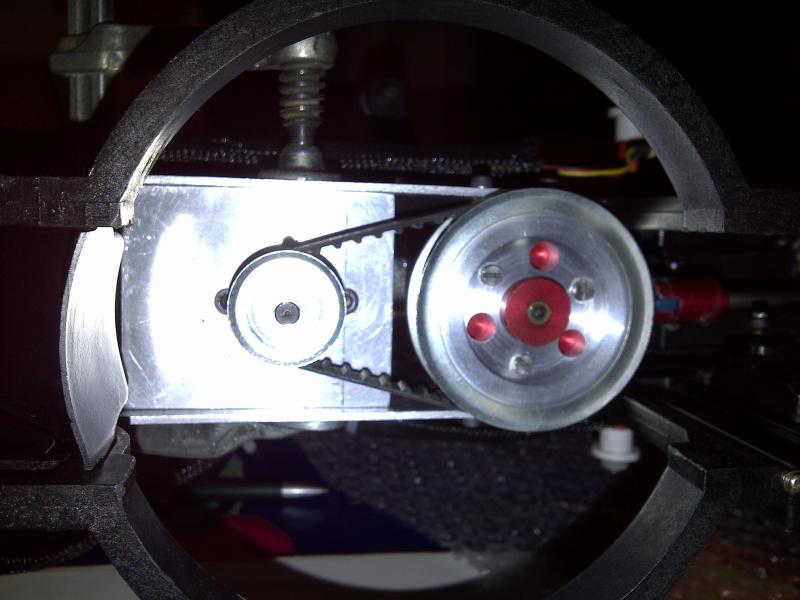
De tandriemwielen heb ik aangeschaft en nu was het zaak om een motorhuis van aluminium te gaan maken wat precies past op het Skyfox frame.
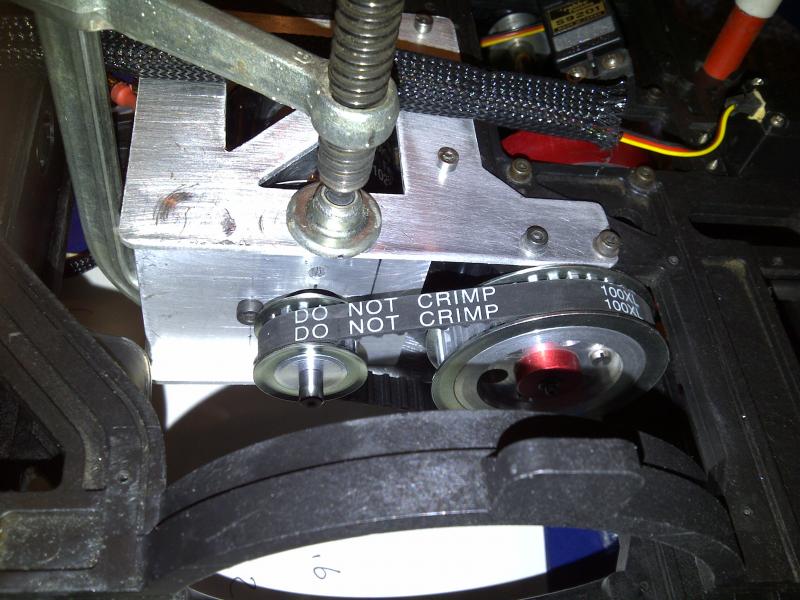
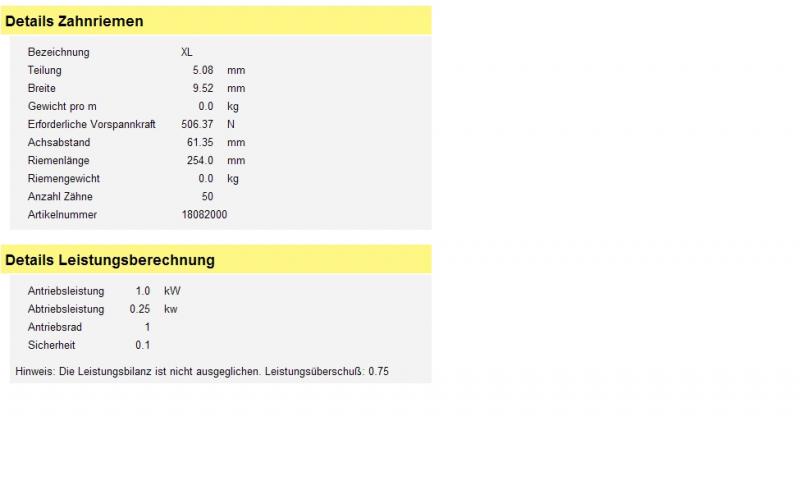
Met een hulpprogramma op de site van Maedler in Duitsland kan exact de hartafstanden tussen de poelies bij de verschillende tandriemlengten worden berekend. Ik heb vanwege de beperkte beschikbare afmetingen in het Skyfox frame gekozen voor een tandriem met 50 tanden die een lengte heeft van 254mm.
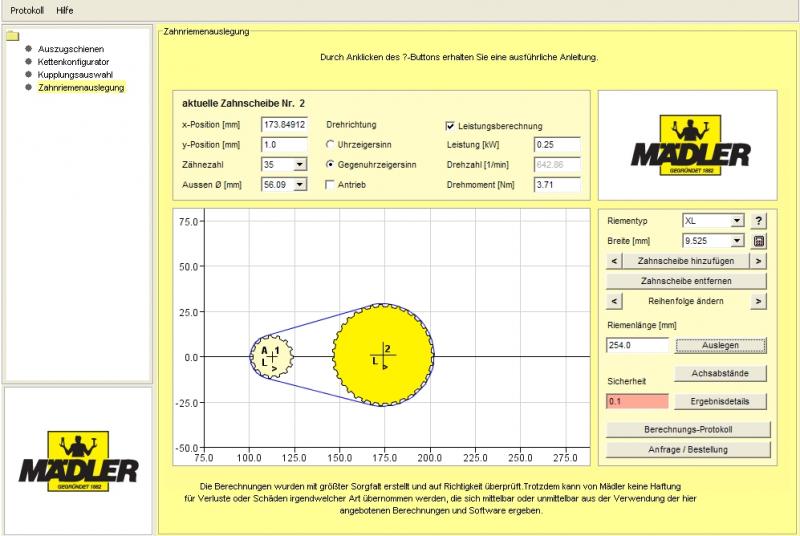
Deze gegevens vul je in bij het tooltje wat een hartafstand oplevert van 61,35 mm.
Dit is nuttige informatie omdat we dan geen slobgaten voor de motorbevestiging nodig hebben en daarmee altijd de juiste riemspanning hebben.
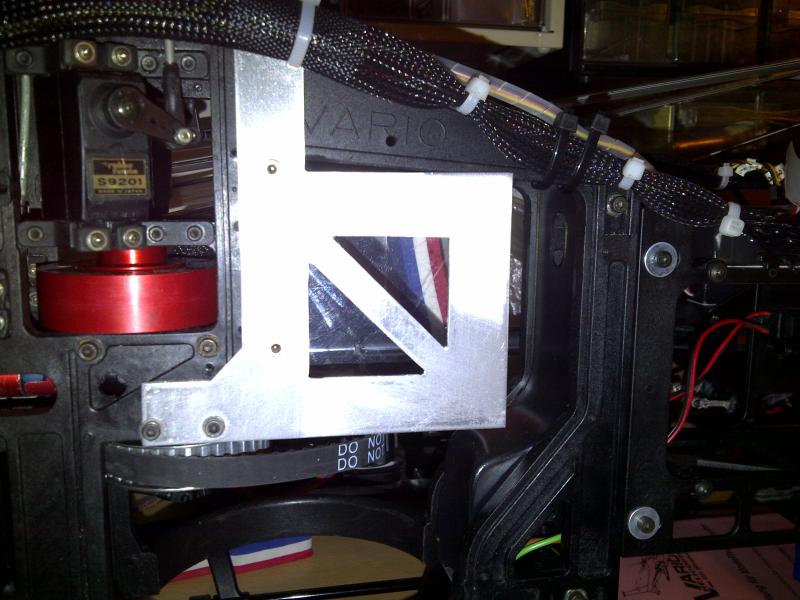
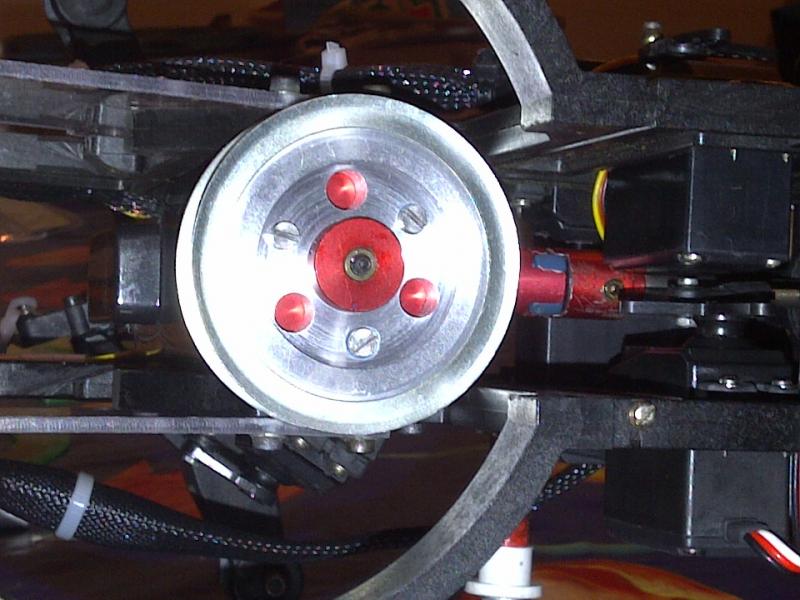
De bedoeling was om de gehele motorsteun uit een 3mm plaat aluminium te maken alleen heb ik hier van afgezien nadat ik met iemand had gesproken die in deze business zit. Hij gaf aan dat je beter 2 losse zijplaten kon maken van 3 mm en een losse bodemplaat van bv 8 mm aluminium. Zo gezegd zo gedaan. Na een aantal uren noeste arbeid van vijlen, zagen, draaien, passen en meten was het zover. De zijplaten en de hoofdpoelie zaten erop.
Laatst bewerkt door een moderator:
")