Ik ben van plan een hexacopter te bouwen als mijn eerste vlieg-RC ervaring. Fotografie is een van mijn hobby's, en ik heb al enige ervaring in RC met autootjes (1:10-1:8 ) alsmede dat ik "genoeg" van elektronica begrijp met mijn opleiding Technisch Informatica.
Waarom hexa ipv quad? Stabiliteit (massa is traag), kracht (optillen van een dSLR evt.) en uiterlijk.
Na het doorlezen van een topic of 20 hier op modelbouwforum, gespeeld te hebben met eCalc, filmpjes heb bekeken en ervaringen gelezen over vele FC's ben ik begonnen met het samenstellen van een onderdelen lijst.
Doel van dit topic is het bouwen van deze Hexacopter, enerzijds kan ik hier advies inwinnen, anderzijds kan een toekomstige hexacopter bouwen hier afwegingen lezen en het gebruiken als referentie.
Ik zal deze startpost bijhouden met de onderdelen lijst voor de hexacopter met de redenering waarom voor een bepaald onderdeel is gegaan. Vragen zal ik in aparte posts in dit topic stellen. Opmerkingen over onderdelen in de startpost (ter verbetering van de hexacopter) zijn altijd welkom.
Bedenk wel dat er ook een prijsoverweging is, anders had ik wel een Microkopter RTF gehaald :wink:
Flight Controller
Als FC heb ik een paar dingen in overweging genomen. Aller eerst ken ik een paar mensen die met een normale RC helikopter hebben gevlogen. Daar heb ik 2 dingen geleerd: 1. helikopter vliegen is -niet- makkelijk, 2. kwaliteit van onderdelen en failsafes zijn erg belangrijk.
Hieruit volgt dat ik graag een FC wil met (evt. in de toekomst) meer mogelijkheden dan stabilize en acro.
De standaard "hobbyking" bordjes als FC vielen dan ook af, vaak is de software van deze bordjes praktisch in een beta fase wanneer ze gereleased worden.
Een tweede eis was opensource, ik ben van huis uit programmeur en vind het leuk om zelf dingen aan te passen.
Op basis van deze eisen heb ik 3 FC's nader bekeken:
OpenPilot - CopterControl
+ Modernere processor (16bit)
+ Stabielere software
+ Beter in Acro
+ Goedkoop (~150 euro met GPS)
- RTH
- Position hold
- GPS gaat via GCS telemetry link
- Hardware moeilijk verkrijgbaar
ArduCopter
+ Features, features, features
+ RTH, Position hold
+ Goedkoop (190 euro met GPS)
- Oudere processor (8bit)
- Minder stabiele software
DJI Naza
+ RTH, Position hold
+ Stabielere software
+ Nieuwe processor
- Duur (350 euro)
Wat betreft de stabiliteit van de software kan ik aan de professionaliteit van OpenPilot zien dat die ongetwijfeld beter zal zijn. Echter is de hardware moeilijk verkrijgbaar, en GPS is toch wel een must voor mij.
Naza is een goede optie, stabieler dan Arducopter, alle functies, alleen erg duur, 350 euro voor alleen de elektronica van mijn hexa gaat me te ver.
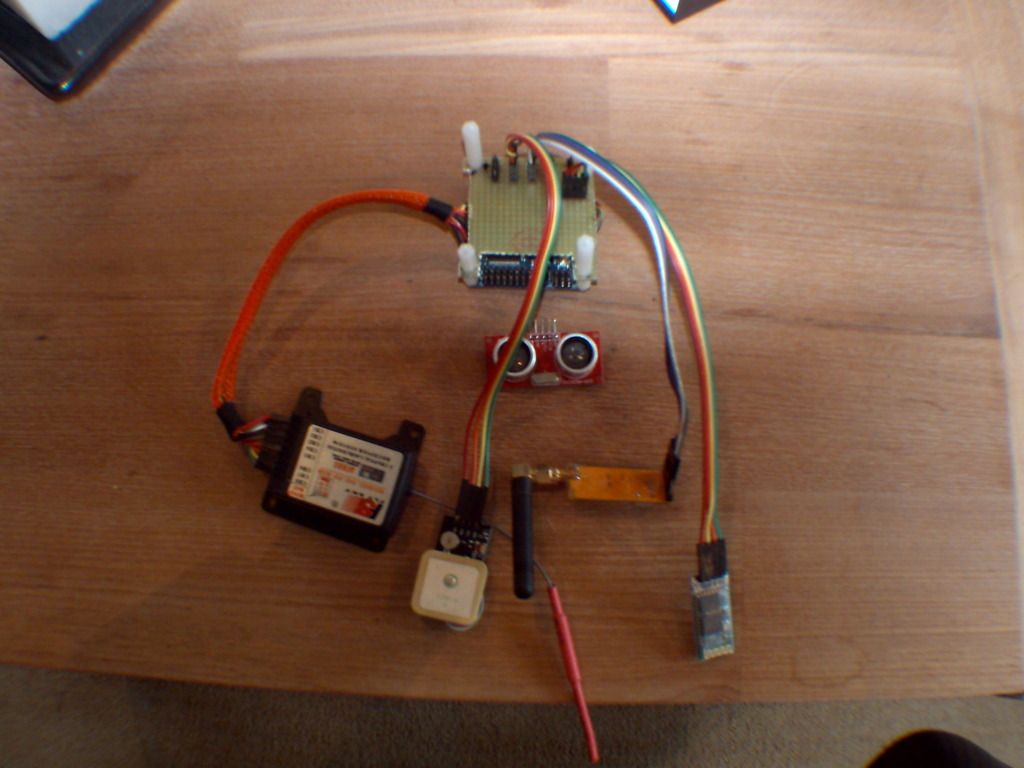
Vanwege mijn gebrek aan ervaring met helikopters en wens voor features / aanpasbaarheid heb ik besloten voor de ArduCopter in samenwerking met de uBlox GPS unit.
De Sonar unit hoeft niet, want de makers van de APM2.5 / Arducopter zeggen dat de barometer op APM 2.5 zo goed is, dat sonar overbodig is.
ArduPilot APM 2.5 ArduPilot Mega 2.5 met uBlox $250 - 45 gram
Frame
Voor het hexa-frame heb ik een paar afwegingen:
1. Goedkoop, ik ben multicopter newbie, en zal vast een keer crashen
2. Zo groot mogelijke diameter, voor stabiliteit, ik ga niet voor snelle acrobatiek.
3. Stevig
4. Liefst geen carbon vanwege de geleiding (RF storing etc.)
H550 V2 Glass Fiber Hexcopter Frame 550mm - Integrated PCB Version
+ Integrated PCB (power distributie)
+ Goedkoop
+ Kleuren voor oriëntatie
+ Glasvezel / nylon
0 Medium size
0 466 gram
Turnigy Talon Hexcopter (V1.0) Carbon Fiber Frame - 625mm
+ Groot
+ 440 gram
- Carbon
- Duur
- Geen kleuren
- Geen power distributie
SIX Glass Fiber Hexcopter Frame 600mm
+ Groot
+ Glasvezel
0 Goede prijs
- 625 gram
- Lastige poten qua montage + meer breekpunten
- Geen kleuren
- Geen power distributie
De keuze was simpel, de H550 V2, met een goedkope H550 V1 (zonder PCB) voor reserve poten.
H550 V2 Glass Fiber Hexcopter Frame 550mm - Integrated PCB Version - $27 - 466 gram
Motorisering
Als ESC koos ik de HobbyKing 30A BlueSeries. De blue series worden als goed aangeschreven en kosten weinig. De 30A variant kost maar een halve dollar minder dan de 20A, en weegt "slechts" 10 gram meer.
6x HobbyKing 30A BlueSeries - $63 - 168 gram
Als motor werd er vanaf het frame een 28mm, 1000-1200kv motor aangeraden, de NTM Prop Drive Series 28-26A 1200kv / 250w voldoet daar aan. Omdat ik liever met een grote prop vlieg met een kleine pitch (vanwege de extra accu tijd) vlieg ik met de maximum prop grootte die op deze hexa past: 10 inch. Hiervoor wil ik een iets zwaardere motor, vandaar de 910kv NTM prop drive.
6x NTM Prop Drive Series 35-36A 910Kv / 350W $18.33 - $110 - 700 gram
Dan nog een propsaver om je as heel te houden:
6x NTM Prop Drive 35 Series Accessory Pack $2 12 gram - $12 - 75 gram
De propellers werden vanaf het frame aangeraden op 8x4 tot 10x4.5. Mijn kennis komt van deze link, niet uit de praktijk.
Wat ik begrijp is dat goedkope props niet goed gebalanceerd zijn, dit is erg belangrijk omdat een niet-gebalanceerde prop vermogen vreet en slecht is voor je motor. Ik heb wel een aantal props nodig om te oefenen.
Het ding met multicopters is dat je langere accuduur krijgt op hover snelheid als je grotere props kiest. Echter heb je voor grote props, ook zwaardere motoren nodig. En als je een te grote pitch met grote props hebt worden je motoren te warm bij meer gas (door de weerstand). Ik ga voor 10x4.5 props, dat geeft me op een 5000mAh 3S lipo ongeveer 11 minuten vliegtijd (hover). Gewoon plastic, carbon e.d. komt wel als ik kan vliegen.
Voor (zwart):
Slow Fly Electric Prop 1045SF (4 pc) - $3 - ? gram
2x Slow Fly Electric Prop 1045R SF RH Rotation (4 pc) - $6 - ? gram
Achter (groen):
2x Slow Fly Electric Prop 1045 SF (4 pc - Green) - $6 - ? gram
Slow Fly Electric Prop 1045R SF (4 pc - Green Right Hand Rotation) - $3 - ? gram
Samenvatting / gewicht
Te Bestellen
H550 V2 Glass Fiber Hexcopter Frame 550mm - Integrated PCB Version - $27 - 466 gram
6x HobbyKing 30A BlueSeries - $63 - 168 gram
6x NTM Prop Drive Series 35-36A 910Kv / 350W - $110 - 700 gram
6x NTM Prop Drive 35 Series Accessory Pack - $12 - 75 gram
Slow Fly Electric Prop 1045SF (4 pc) - $3 - ? gram
2xSlow Fly Electric Prop 1045R SF RH Rotation (4 pc) - $6 - ? gram
2x Slow Fly Electric Prop 1045 SF (4 pc - Green) - $6 - ? gram
Slow Fly Electric Prop 1045R SF (4 pc - Green Right Hand Rotation) - $3 - ? gram
4x LED strip - $8 - 32 gram
Overigen
2x Turnigy Pure-Silicone Wire 16AWG (1mtr) RED - $1.5 (voor ESCs vanaf power distributie)
2x Turnigy Pure-Silicone Wire 16AWG (1mtr) BLACK - $1.5
1x Turnigy Pure-Silicone Wire 8AWG (1 mtr) RED - $2 (voor power distributie naar deans voor batterij)
1x Turnigy Pure Silicone Wire 8AWG (1 mtr) BLACK - $2
1x HobbyKing Programming card for BlueSeries Brushless Speed Controller - $3.5
2x ZIPPY Flightmax 5800mAh 3S1P 30C - $87 - 425 gram
Totale prijs: ~332 dollar, ex shipping, ex import
Binnen
ArduPilot APM 2.5 ArduPilot Mega 2.5 met uBlox 150 euro - 45 gram
FTDI Kabel 10 euro
Kosten: 160 euro, inc shipping, inc import
Wat heb ik al
LiPo lader (iMab B6-AC)
Turnigy 9x 9ch transmitter without module + 3S 1800 1C MaH LiFePo4
FrSky DF 2.4 Ghz Combo Pack for JW w/ Module
FrSky D8R-XP 2.4 Ghz 8Ch Receiver
Boel 2S 5000mAh 30-40C LiPo's
Boel Deans connectors (male en female)
Krimpkous / soldeer etc.
Totaal vlieggewicht: ~2330 gram, totale vliegtijd per accu: ~10 minuten
Doorberekening met eCalc
LET OP
Inmiddels heb ik een betere configuratie gevonden dan de hier bovenstaande, met motors van RCTimer, de A3530-14 (1100 kv). Als je die motors toevoegt en voor de rest alles hetzelfde houd, heb je meer lift, en meer vliegtijd: eCalc voorbeeldhttp://i.imgur.com/IoDmB.png
Waarom hexa ipv quad? Stabiliteit (massa is traag), kracht (optillen van een dSLR evt.) en uiterlijk.
Na het doorlezen van een topic of 20 hier op modelbouwforum, gespeeld te hebben met eCalc, filmpjes heb bekeken en ervaringen gelezen over vele FC's ben ik begonnen met het samenstellen van een onderdelen lijst.
Doel van dit topic is het bouwen van deze Hexacopter, enerzijds kan ik hier advies inwinnen, anderzijds kan een toekomstige hexacopter bouwen hier afwegingen lezen en het gebruiken als referentie.
Ik zal deze startpost bijhouden met de onderdelen lijst voor de hexacopter met de redenering waarom voor een bepaald onderdeel is gegaan. Vragen zal ik in aparte posts in dit topic stellen. Opmerkingen over onderdelen in de startpost (ter verbetering van de hexacopter) zijn altijd welkom.
Bedenk wel dat er ook een prijsoverweging is, anders had ik wel een Microkopter RTF gehaald :wink:
Flight Controller
Als FC heb ik een paar dingen in overweging genomen. Aller eerst ken ik een paar mensen die met een normale RC helikopter hebben gevlogen. Daar heb ik 2 dingen geleerd: 1. helikopter vliegen is -niet- makkelijk, 2. kwaliteit van onderdelen en failsafes zijn erg belangrijk.
Hieruit volgt dat ik graag een FC wil met (evt. in de toekomst) meer mogelijkheden dan stabilize en acro.
De standaard "hobbyking" bordjes als FC vielen dan ook af, vaak is de software van deze bordjes praktisch in een beta fase wanneer ze gereleased worden.
Een tweede eis was opensource, ik ben van huis uit programmeur en vind het leuk om zelf dingen aan te passen.
Op basis van deze eisen heb ik 3 FC's nader bekeken:
OpenPilot - CopterControl
+ Modernere processor (16bit)
+ Stabielere software
+ Beter in Acro
+ Goedkoop (~150 euro met GPS)
- RTH
- Position hold
- GPS gaat via GCS telemetry link
- Hardware moeilijk verkrijgbaar
ArduCopter
+ Features, features, features
+ RTH, Position hold
+ Goedkoop (190 euro met GPS)
- Oudere processor (8bit)
- Minder stabiele software
DJI Naza
+ RTH, Position hold
+ Stabielere software
+ Nieuwe processor
- Duur (350 euro)
Wat betreft de stabiliteit van de software kan ik aan de professionaliteit van OpenPilot zien dat die ongetwijfeld beter zal zijn. Echter is de hardware moeilijk verkrijgbaar, en GPS is toch wel een must voor mij.
Naza is een goede optie, stabieler dan Arducopter, alle functies, alleen erg duur, 350 euro voor alleen de elektronica van mijn hexa gaat me te ver.
Vanwege mijn gebrek aan ervaring met helikopters en wens voor features / aanpasbaarheid heb ik besloten voor de ArduCopter in samenwerking met de uBlox GPS unit.
De Sonar unit hoeft niet, want de makers van de APM2.5 / Arducopter zeggen dat de barometer op APM 2.5 zo goed is, dat sonar overbodig is.
ArduPilot APM 2.5 ArduPilot Mega 2.5 met uBlox $250 - 45 gram
Frame
Voor het hexa-frame heb ik een paar afwegingen:
1. Goedkoop, ik ben multicopter newbie, en zal vast een keer crashen
2. Zo groot mogelijke diameter, voor stabiliteit, ik ga niet voor snelle acrobatiek.
3. Stevig
4. Liefst geen carbon vanwege de geleiding (RF storing etc.)
H550 V2 Glass Fiber Hexcopter Frame 550mm - Integrated PCB Version
+ Integrated PCB (power distributie)
+ Goedkoop
+ Kleuren voor oriëntatie
+ Glasvezel / nylon
0 Medium size
0 466 gram
Turnigy Talon Hexcopter (V1.0) Carbon Fiber Frame - 625mm
+ Groot
+ 440 gram
- Carbon
- Duur
- Geen kleuren
- Geen power distributie
SIX Glass Fiber Hexcopter Frame 600mm
+ Groot
+ Glasvezel
0 Goede prijs
- 625 gram
- Lastige poten qua montage + meer breekpunten
- Geen kleuren
- Geen power distributie
De keuze was simpel, de H550 V2, met een goedkope H550 V1 (zonder PCB) voor reserve poten.
H550 V2 Glass Fiber Hexcopter Frame 550mm - Integrated PCB Version - $27 - 466 gram
Motorisering
Als ESC koos ik de HobbyKing 30A BlueSeries. De blue series worden als goed aangeschreven en kosten weinig. De 30A variant kost maar een halve dollar minder dan de 20A, en weegt "slechts" 10 gram meer.
6x HobbyKing 30A BlueSeries - $63 - 168 gram
Als motor werd er vanaf het frame een 28mm, 1000-1200kv motor aangeraden, de NTM Prop Drive Series 28-26A 1200kv / 250w voldoet daar aan. Omdat ik liever met een grote prop vlieg met een kleine pitch (vanwege de extra accu tijd) vlieg ik met de maximum prop grootte die op deze hexa past: 10 inch. Hiervoor wil ik een iets zwaardere motor, vandaar de 910kv NTM prop drive.
6x NTM Prop Drive Series 35-36A 910Kv / 350W $18.33 - $110 - 700 gram
Dan nog een propsaver om je as heel te houden:
6x NTM Prop Drive 35 Series Accessory Pack $2 12 gram - $12 - 75 gram
De propellers werden vanaf het frame aangeraden op 8x4 tot 10x4.5. Mijn kennis komt van deze link, niet uit de praktijk.
Wat ik begrijp is dat goedkope props niet goed gebalanceerd zijn, dit is erg belangrijk omdat een niet-gebalanceerde prop vermogen vreet en slecht is voor je motor. Ik heb wel een aantal props nodig om te oefenen.
Het ding met multicopters is dat je langere accuduur krijgt op hover snelheid als je grotere props kiest. Echter heb je voor grote props, ook zwaardere motoren nodig. En als je een te grote pitch met grote props hebt worden je motoren te warm bij meer gas (door de weerstand). Ik ga voor 10x4.5 props, dat geeft me op een 5000mAh 3S lipo ongeveer 11 minuten vliegtijd (hover). Gewoon plastic, carbon e.d. komt wel als ik kan vliegen.
Voor (zwart):
Slow Fly Electric Prop 1045SF (4 pc) - $3 - ? gram
2x Slow Fly Electric Prop 1045R SF RH Rotation (4 pc) - $6 - ? gram
Achter (groen):
2x Slow Fly Electric Prop 1045 SF (4 pc - Green) - $6 - ? gram
Slow Fly Electric Prop 1045R SF (4 pc - Green Right Hand Rotation) - $3 - ? gram
Samenvatting / gewicht
Te Bestellen
H550 V2 Glass Fiber Hexcopter Frame 550mm - Integrated PCB Version - $27 - 466 gram
6x HobbyKing 30A BlueSeries - $63 - 168 gram
6x NTM Prop Drive Series 35-36A 910Kv / 350W - $110 - 700 gram
6x NTM Prop Drive 35 Series Accessory Pack - $12 - 75 gram
Slow Fly Electric Prop 1045SF (4 pc) - $3 - ? gram
2xSlow Fly Electric Prop 1045R SF RH Rotation (4 pc) - $6 - ? gram
2x Slow Fly Electric Prop 1045 SF (4 pc - Green) - $6 - ? gram
Slow Fly Electric Prop 1045R SF (4 pc - Green Right Hand Rotation) - $3 - ? gram
4x LED strip - $8 - 32 gram
Overigen
2x Turnigy Pure-Silicone Wire 16AWG (1mtr) RED - $1.5 (voor ESCs vanaf power distributie)
2x Turnigy Pure-Silicone Wire 16AWG (1mtr) BLACK - $1.5
1x Turnigy Pure-Silicone Wire 8AWG (1 mtr) RED - $2 (voor power distributie naar deans voor batterij)
1x Turnigy Pure Silicone Wire 8AWG (1 mtr) BLACK - $2
1x HobbyKing Programming card for BlueSeries Brushless Speed Controller - $3.5
2x ZIPPY Flightmax 5800mAh 3S1P 30C - $87 - 425 gram
Totale prijs: ~332 dollar, ex shipping, ex import
Binnen
ArduPilot APM 2.5 ArduPilot Mega 2.5 met uBlox 150 euro - 45 gram
FTDI Kabel 10 euro
Kosten: 160 euro, inc shipping, inc import
Wat heb ik al
LiPo lader (iMab B6-AC)
Turnigy 9x 9ch transmitter without module + 3S 1800 1C MaH LiFePo4
FrSky DF 2.4 Ghz Combo Pack for JW w/ Module
FrSky D8R-XP 2.4 Ghz 8Ch Receiver
Boel 2S 5000mAh 30-40C LiPo's
Boel Deans connectors (male en female)
Krimpkous / soldeer etc.
Totaal vlieggewicht: ~2330 gram, totale vliegtijd per accu: ~10 minuten
Doorberekening met eCalc
LET OP
Inmiddels heb ik een betere configuratie gevonden dan de hier bovenstaande, met motors van RCTimer, de A3530-14 (1100 kv). Als je die motors toevoegt en voor de rest alles hetzelfde houd, heb je meer lift, en meer vliegtijd: eCalc voorbeeldhttp://i.imgur.com/IoDmB.png
Laatst bewerkt door een moderator:








")


")

 )
)
