Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Naze32acro probleem
- Topicstarter Rubaaaa
- Startdatum
BorisB
Forum veteraan
weten jullie echt niet wat ik nou moet doen, moet ik als de quad naar achteren drift + trimmen in baseflight of - trimmen?
Trimmen op m'n zender doe ik nooit tenzij er iets met de yaw is maar dat is niet het geval.
Gewoon ACC trim doen in de naze totdat het ongeveer recht blijft hoveren.
CG check moet je in rate mode doen, dus niet in level.
thx daar ik mijn naze niet vliegend krijg ga ik deze tool eens proberen en herbeginnen van 0.
al lijkt mijn probleem veel op dat van ruba. achterkant gisteren naar voor geslagen bij beetje gas en 3 props stuk. naze staat nochtans pal center op het flip frame.

Aai dat is minder.
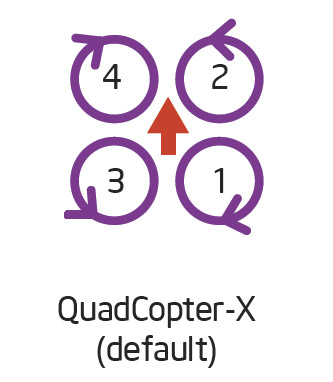
Weten jullie zeker dat jullie de volgorde van de motoren goed hebben aangesloten? Dis is de standaard motorvolgorde bij de Naze32:
Plaatsing van het bordje maakt weinig uit bij deze controller. Zelf heb ik hem een paar cm voor het midden geplaatst zodat mijn LiPo erachter past.
Zoals Garbungel al aangaf; testen zonder propellers!
Dus propellers eraf, vliegmodus op Acro (gyro only) zetten en een klein beetje gas geven. daarna kun je de quadcopter op de volgende manieren testen.
1. pak de quadcopter op en beweeg elke keer 1 arm naar beneden De motor van de arm die je naar beneden beweegt moet sneller gaan draaien.
2. zet de quadcopter weer op de grond en beweeg de rechterstick (mode 2) naar de hoeken. Als je de stick rechtsboven houd dan gaat de motor linksachter harder draaien, houd je de stick rechtsonder dan gaat de motor linksvoor harder draaien, enzovoort.
Als dat allemaal goed werkt dan weet je dat de oriëntatie van het bord goed is en dat je geen kanalen op je afstandbediening hoeft om te draaien.
Met de standaard PID instellingen van de Naze32 moet je 9 van de 10 keer al aardig de lucht in kunnen.
Laatst bewerkt door een moderator:
BorisB
Forum veteraan
10 van de 10 keer ;pMet de standaard PID instellingen van de Naze32 moet je 9 van de 10 keer al aardig de lucht in kunnen.
Ja motoren zitten goed in de naze, had er zelfs met stift op gezet wat wat is om zeker te zijn dat ik geen fouten maakte :

Alleen zittend e motoren nu anders, na het instellen van de spekrum zender werkte 2 motoren niet meer en was het zoals in de handleiding vanaf 3 de pin reeks M1 tot M4
Alleen zittend e motoren nu anders, na het instellen van de spekrum zender werkte 2 motoren niet meer en was het zoals in de handleiding vanaf 3 de pin reeks M1 tot M4
Alleen zittend e motoren nu anders, na het instellen van de spekrum zender werkte 2 motoren niet meer en was het zoals in de handleiding vanaf 3 de pin reeks M1 tot M4
Dat motor 1 op pin3 zit is alleen bij Servo mode, bijvoorbeeld als je hem voor een tricopter instelt. Bij een standaard X quadcopter zit motor 1 echt op pin 1.
Op de foto hierboven is het dus fout.
We een hele nette build verder overigens. Ziet er top uit!
Volgens de motornummering zijn de oranje armen de voorkant van je frame.
Volgens de pijl op het naze bordje zijn de zwarte armen de voorkant van het frame.
Een van de 2 omdraaien dus")
Sorry de plaat ligt hier los
") de pijl staat wel degelijk naar de voorkant
de pijl staat wel degelijk naar de voorkant 

laat maar
ik heb nog steeds het gevoel dat m'n quad de neiging heeft om z'n "level" parameters telkens aan te passen tijdens de vlucht...
de ene keer wil ie naar voren, dan stuur ik naar achteren en wil ie naar achteren blijven gaan en ook naar rechts.... ik vlieg gewoon op angle mode maar hoe ik m'n acc trims ook zet er is gewoon geen invloed... ook heb ik het gevoel dat hij bij een kleine stick movement langzaam yawt en na een gegeven punt opeens als een gek gaat draaien....
reageer vanavond pas op eventuele oplossing aangezien ik zo ga trainen..
de ene keer wil ie naar voren, dan stuur ik naar achteren en wil ie naar achteren blijven gaan en ook naar rechts.... ik vlieg gewoon op angle mode maar hoe ik m'n acc trims ook zet er is gewoon geen invloed... ook heb ik het gevoel dat hij bij een kleine stick movement langzaam yawt en na een gegeven punt opeens als een gek gaat draaien....
reageer vanavond pas op eventuele oplossing aangezien ik zo ga trainen..
Dat ie ineens sneller gaat draaien klopt, als je dit niet wil moet je je expo lager zetten(in de tx of via de multiwii gui ofzo)
Waarom de level het niet goed doet weet ik zo niet.
Waarom de level het niet goed doet weet ik zo niet.
ook heb ik het gevoel dat hij bij een kleine stick movement langzaam yawt en na een gegeven punt opeens als een gek gaat draaien....
Gains omhoog zetten zal waarschijnlijk helpen
aan welke gains denken we dan, ben niet zo goed in het gains gedoe...
pgain totdat ie gaat oscilleren toch?
Igain ook totdat ie gaat Oscilleren toch?
D wat moet daarme gebeuren?
heb gisteren aan het ding gesleuteld, hij levelt nu goed maar ik heb het bordje behoorlijk scheef moeten zetten en een enorme hoeveelheid trim in moeten stellen....
Hij vliegt nu bij het opstijgen wil ie gelijk naar voren (omdat ik zo getrimd heb) maar als ie eenmaal in de lucht is levelt ie goed, soms wijkt ie een klein beetje af maar dat is te overzien.
als het weer wat nu echt k*t is een beetje beter wordt kan ik buiten ff testen en aan de gains gaan werken...
Hij vliegt nu bij het opstijgen wil ie gelijk naar voren (omdat ik zo getrimd heb) maar als ie eenmaal in de lucht is levelt ie goed, soms wijkt ie een klein beetje af maar dat is te overzien.
als het weer wat nu echt k*t is een beetje beter wordt kan ik buiten ff testen en aan de gains gaan werken...
heb gisteren aan het ding gesleuteld, hij levelt nu goed maar ik heb het bordje behoorlijk scheef moeten zetten en een enorme hoeveelheid trim in moeten stellen....
Hij vliegt nu bij het opstijgen wil ie gelijk naar voren (omdat ik zo getrimd heb) maar als ie eenmaal in de lucht is levelt ie goed, soms wijkt ie een klein beetje af maar dat is te overzien.
Hmm.. vreemd.. Kun je in de software ergens terug zien dat hij level is? En geeft hij nou helemaal level aan terwijl hij scheef staat?
Wellicht een nieuwe kalibratie uitvoeren? Het zou toch niet moeten kunnen dat een bord denkt recht te hangen terwijl het scheef hangt na een kalibratie...