J
JasperW
Guest
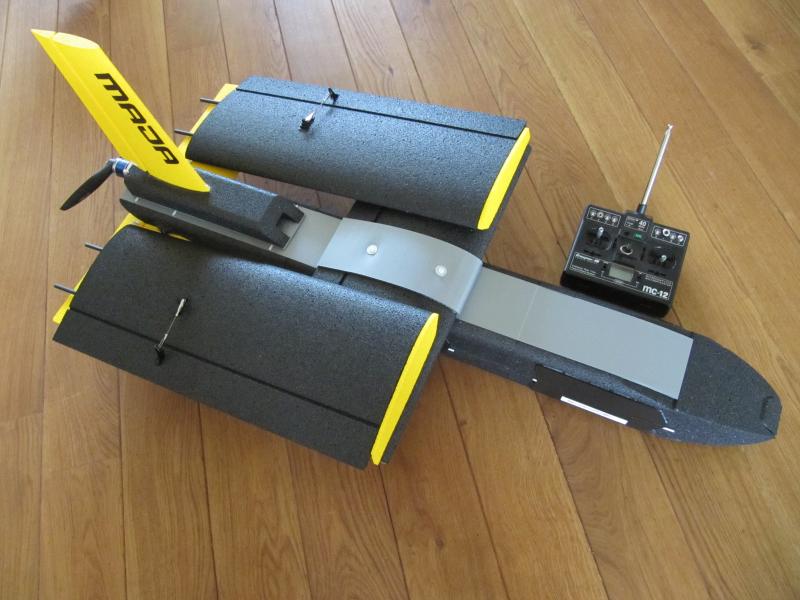
Op zoek naar een stabiel platform voor FPV en UAV experimenten ben ik op de MAJA van Bormatec uitgekomen. Dit is een hoogdekker met achteraandrijving die ontworpen is als draagplatform voor FPV/RPV/UAV en luchtmetingen.
Spanwijdte: 180 cm
Lengte: 120 cm
Gewicht: 1,5 kg
Lading: 1,2 kg !!
Willkommen bei Bormatec

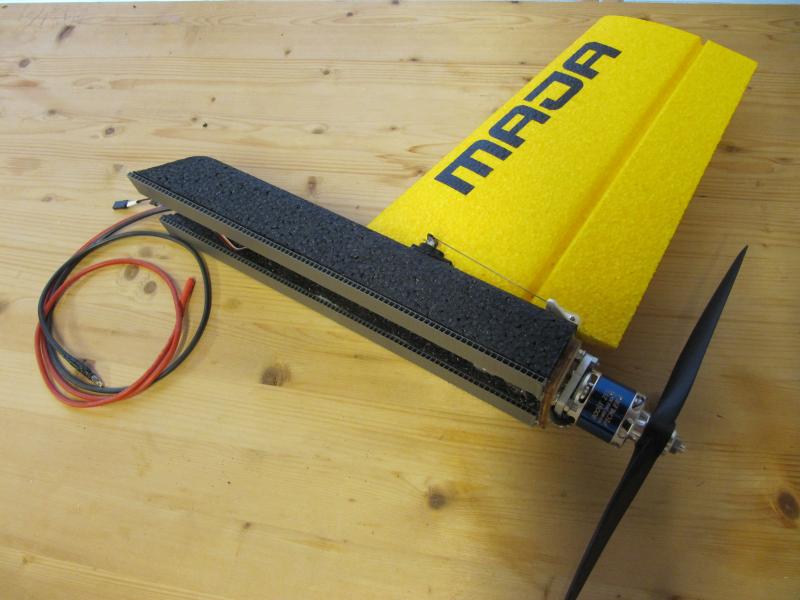
Zo moet het ongeveer gaan vliegen zoals deze MAJA in Zwitserland.

De kit wordt in een stevige doos geleverd. Het materiaal is van EPP met sterke Duroplast platen die ook in de autoindustrie gebruikt worden. Het EPP is met een lijmpistool gelijmd op enkele plaatsen na, die met 5 min. epoxy zijn gedaan.
Ik heb enige modificaties aangebracht:
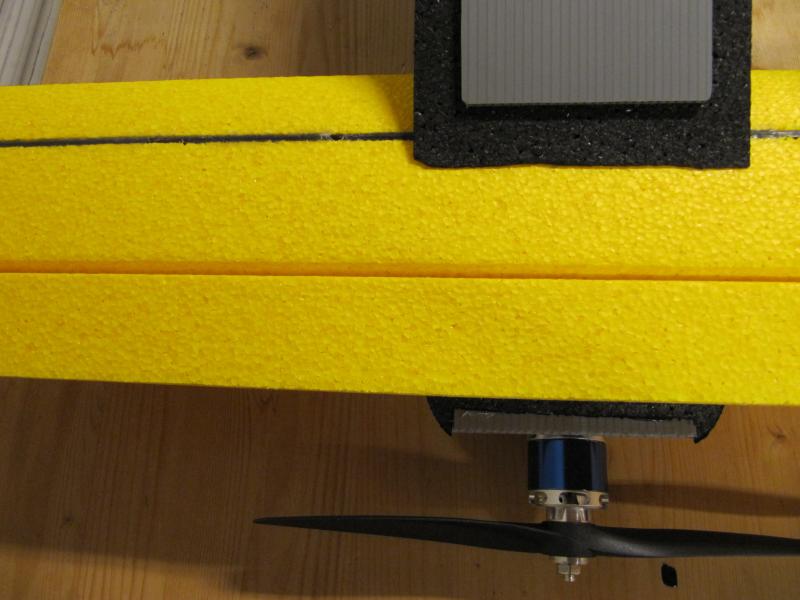
In de achtervleugel is een 3 mm CFK staaf ingelijmd.
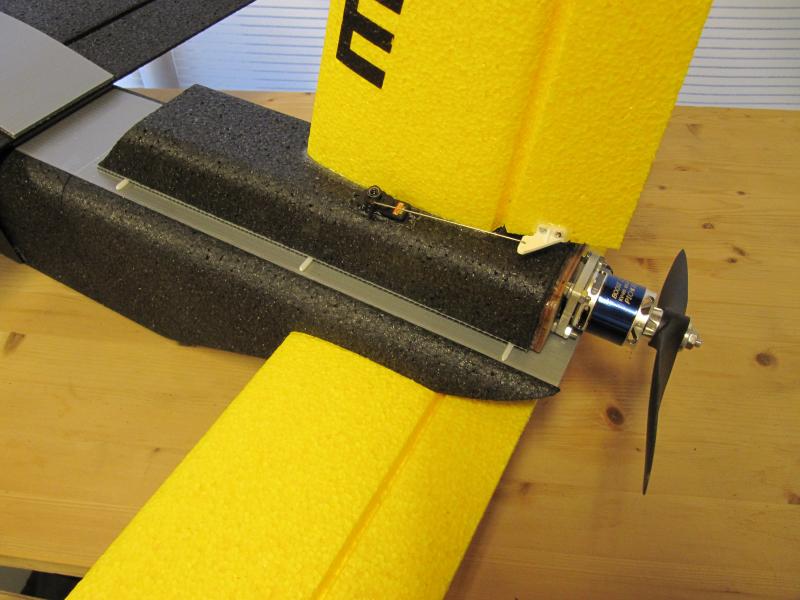
De hoogteroer servo is in de romp gebouwd en niet in de opbouw.

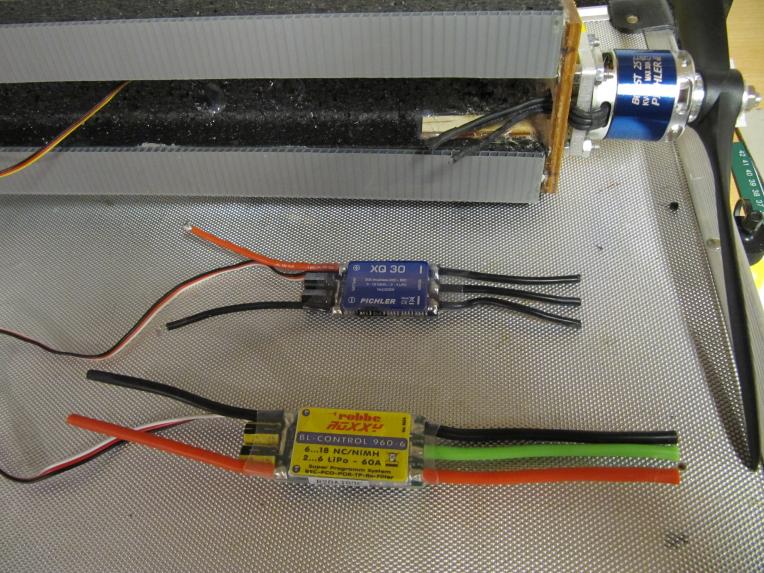
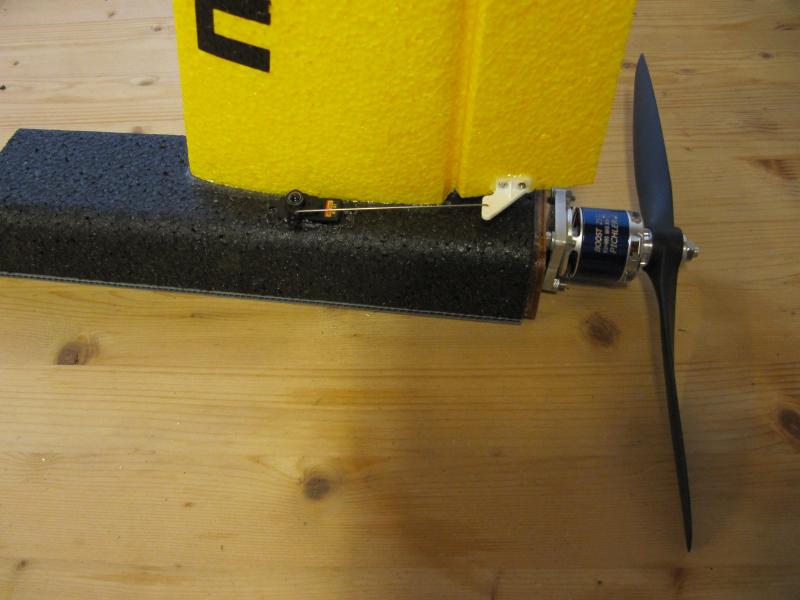
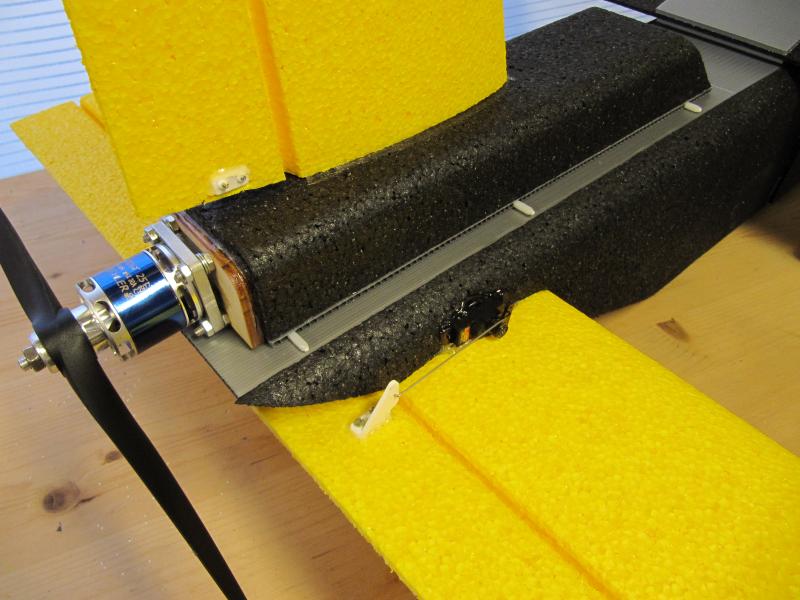
De motorsteun is van stevig multiplex en is met 5 min. epoxy gelijmd.
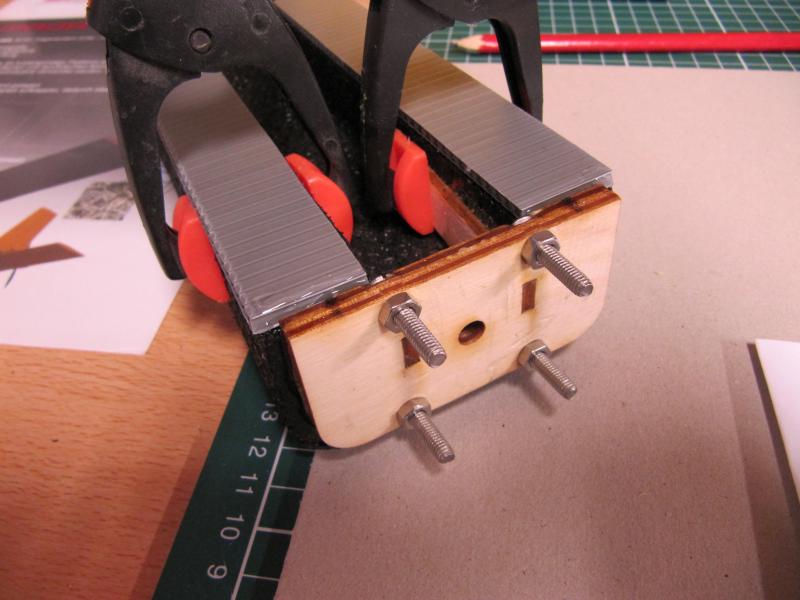
Daarna met epoxy in de opbouw vastgezet. Met de M3 moeren is het ook makkelijk om de motor domp in te stellen.

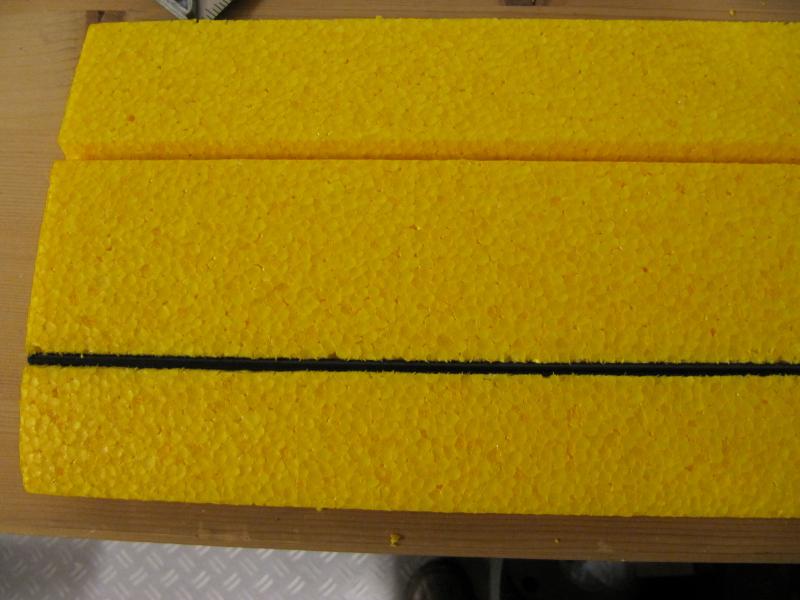
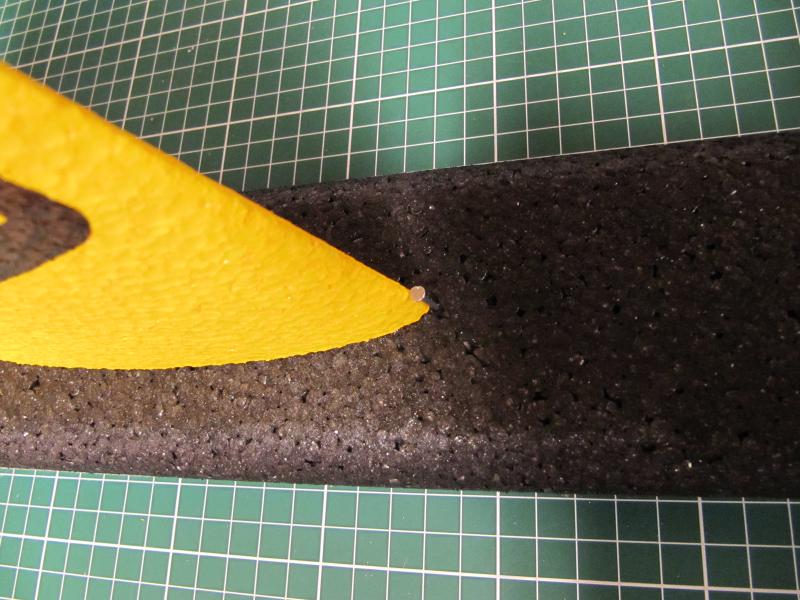
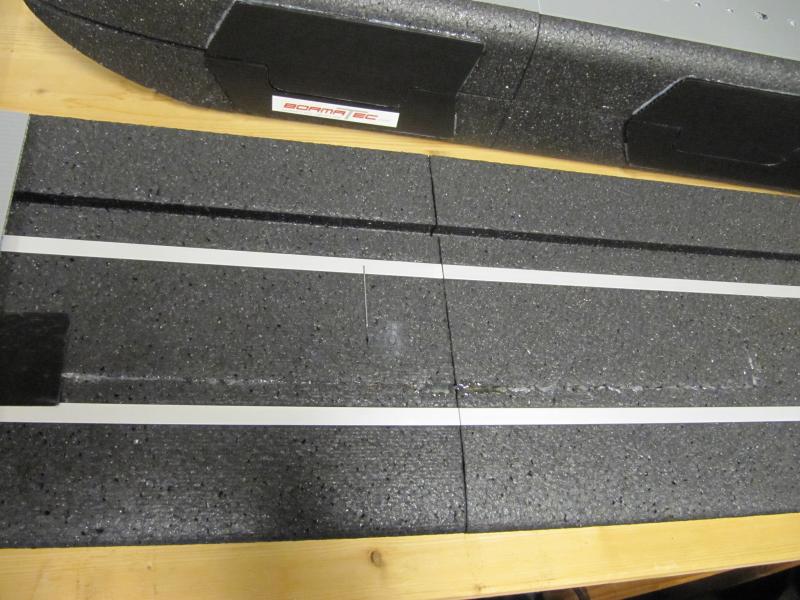
Omdat EPP na een paar jaar zijn stijfheid verliest heb ik op 1/3 van het stabilo een 3 mm CFK staaf ingefreesd en gelijmd.
Het stabilo goed recht inmeten:

En met epoxy op zijn plaats lijmen:
Het kielvlak moet heel precies worden ingemeten. Eerst het midden bepalen en dan met spelden voor en achter het kielvlak de exacte plaats vastleggen. Daarna met epoxy vastzetten.
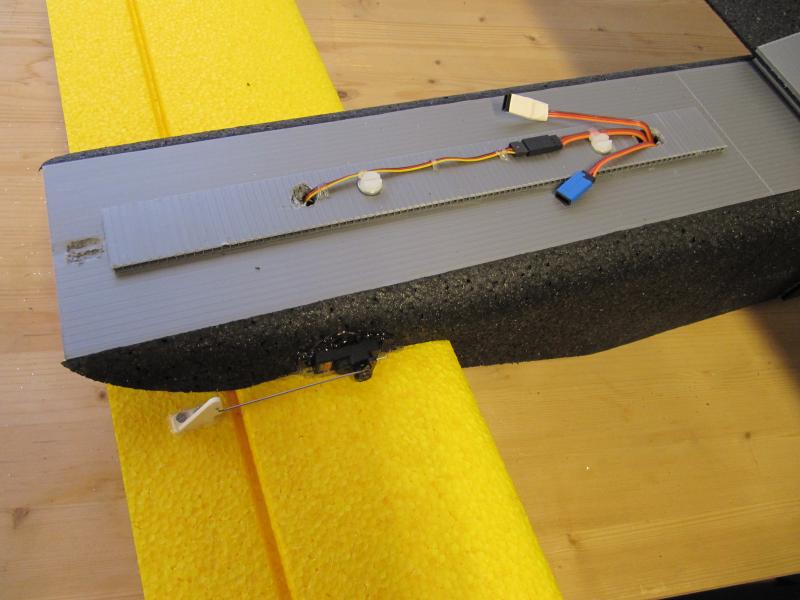
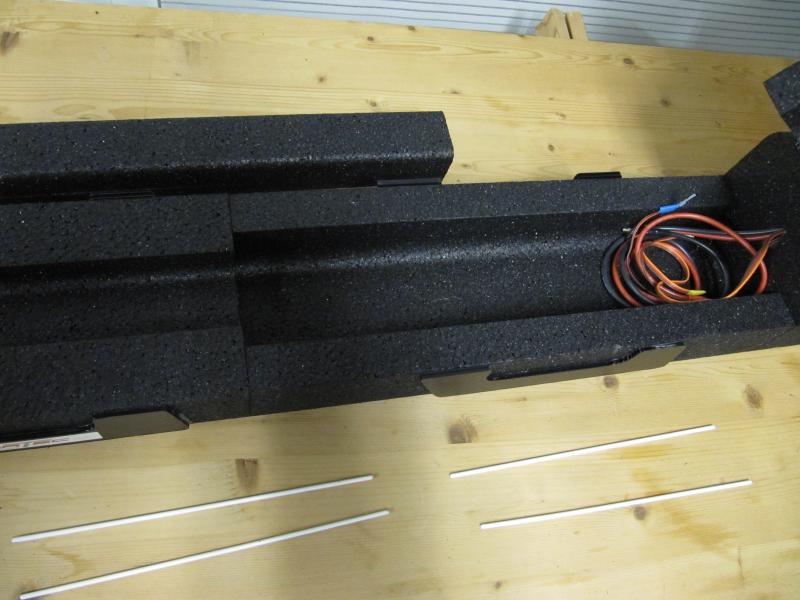
De opbouw verder afmaken met richtingsroer servo, regelaar en voedingskabel.
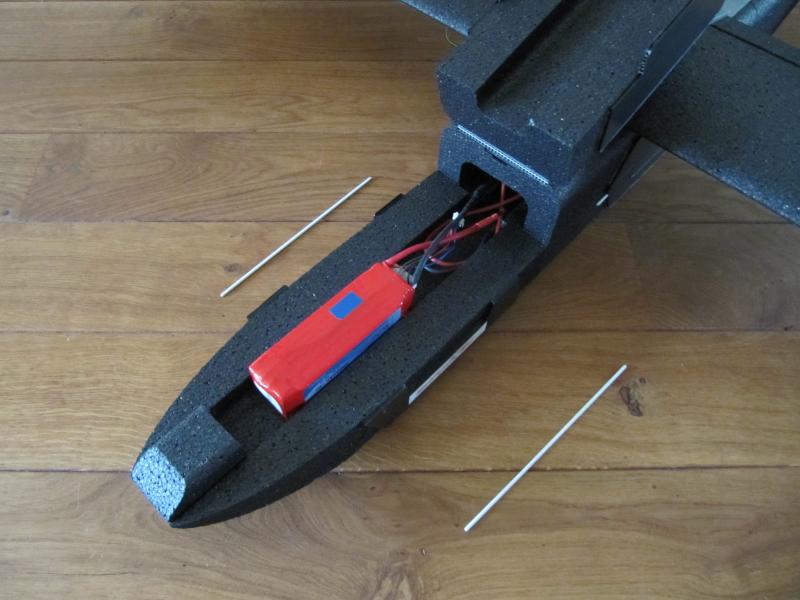
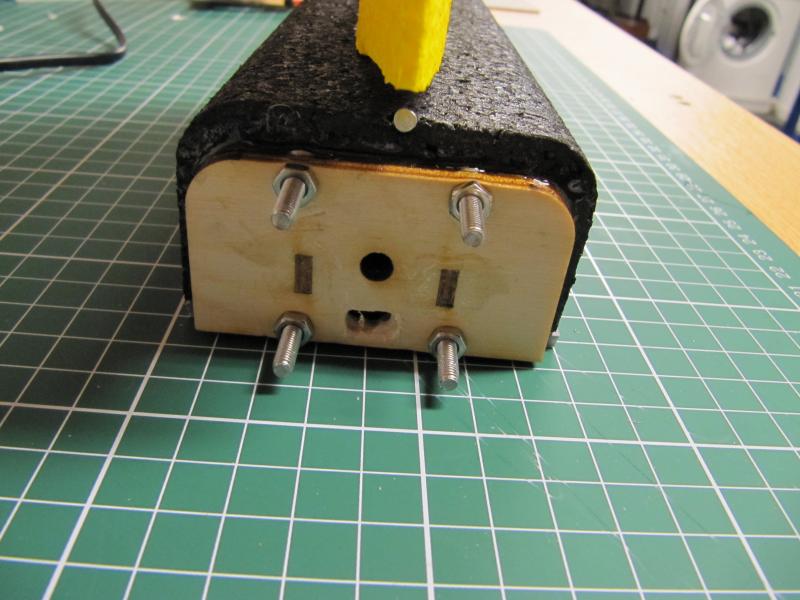
Hoewel de Duroplast voet van de opbouw heel sterk is verlijmd heb ik toch twee M6 plastic bouten van 4 en 6 cm diep in de romp ingelijmd als extra anker. Ook het ik de hoogteroer servo in de romp ingebouwd om de opbouw makkelijk los te kunnen halen.
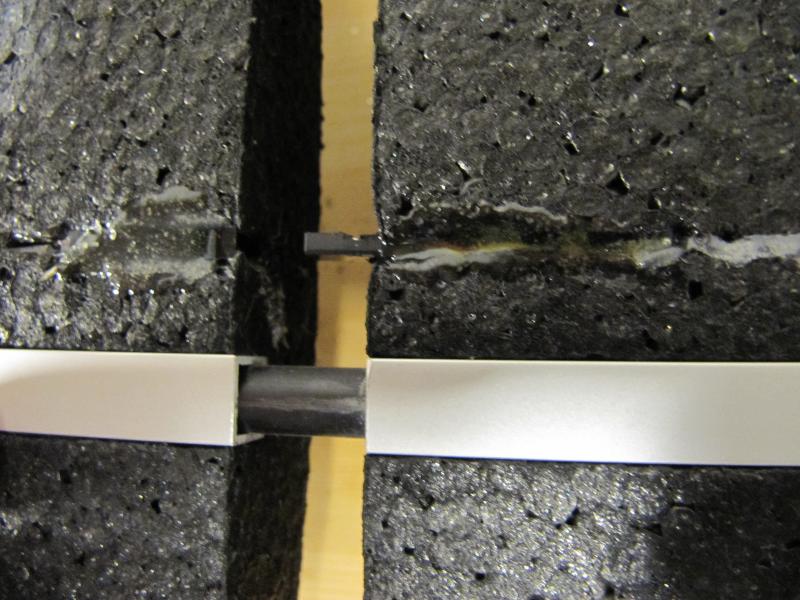
De opbouw wordt met 3 pennen vast gezet. (lijkt dun maar is echt heel stevig)
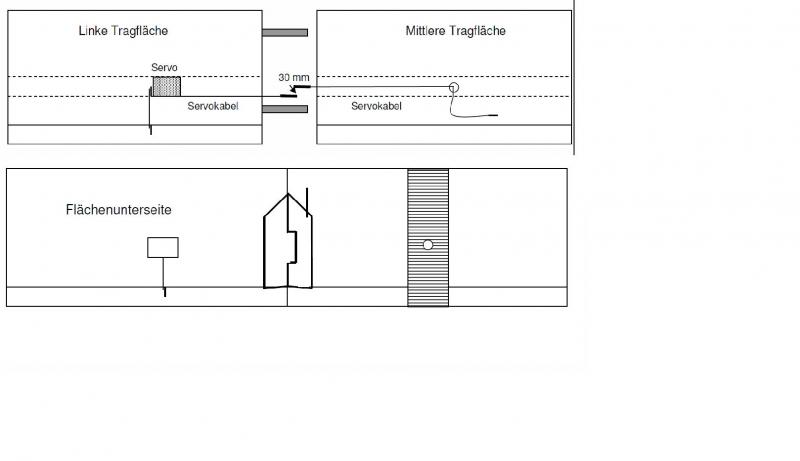
Tot zover eerste deel. Hierna de vleugels en de rolroer servos.
Spanwijdte: 180 cm
Lengte: 120 cm
Gewicht: 1,5 kg
Lading: 1,2 kg !!
Willkommen bei Bormatec
Zo moet het ongeveer gaan vliegen zoals deze MAJA in Zwitserland.
De kit wordt in een stevige doos geleverd. Het materiaal is van EPP met sterke Duroplast platen die ook in de autoindustrie gebruikt worden. Het EPP is met een lijmpistool gelijmd op enkele plaatsen na, die met 5 min. epoxy zijn gedaan.
Ik heb enige modificaties aangebracht:
In de achtervleugel is een 3 mm CFK staaf ingelijmd.
De hoogteroer servo is in de romp gebouwd en niet in de opbouw.
De motorsteun is van stevig multiplex en is met 5 min. epoxy gelijmd.
Daarna met epoxy in de opbouw vastgezet. Met de M3 moeren is het ook makkelijk om de motor domp in te stellen.
Omdat EPP na een paar jaar zijn stijfheid verliest heb ik op 1/3 van het stabilo een 3 mm CFK staaf ingefreesd en gelijmd.
Het stabilo goed recht inmeten:
En met epoxy op zijn plaats lijmen:
Het kielvlak moet heel precies worden ingemeten. Eerst het midden bepalen en dan met spelden voor en achter het kielvlak de exacte plaats vastleggen. Daarna met epoxy vastzetten.
De opbouw verder afmaken met richtingsroer servo, regelaar en voedingskabel.
Hoewel de Duroplast voet van de opbouw heel sterk is verlijmd heb ik toch twee M6 plastic bouten van 4 en 6 cm diep in de romp ingelijmd als extra anker. Ook het ik de hoogteroer servo in de romp ingebouwd om de opbouw makkelijk los te kunnen halen.
De opbouw wordt met 3 pennen vast gezet. (lijkt dun maar is echt heel stevig)
Tot zover eerste deel. Hierna de vleugels en de rolroer servos.
Laatst bewerkt door een moderator:





")
") .
.