Ik ben gestart met de bouw van een Quadcopter voor universeel gebruik. Ik vond het wel interessant om de bouw ervan op dit forum te plaatsen, bij deze dus.
De quad moet voor FPV gebruikt kunnen worden, maar ook camera-loos te gebruiken zijn.
Vooral de ligging van het zwaartepunt moet juist zijn, dus een ombouw tussen FPV en camera-loos is bijna niet uit te sluiten.
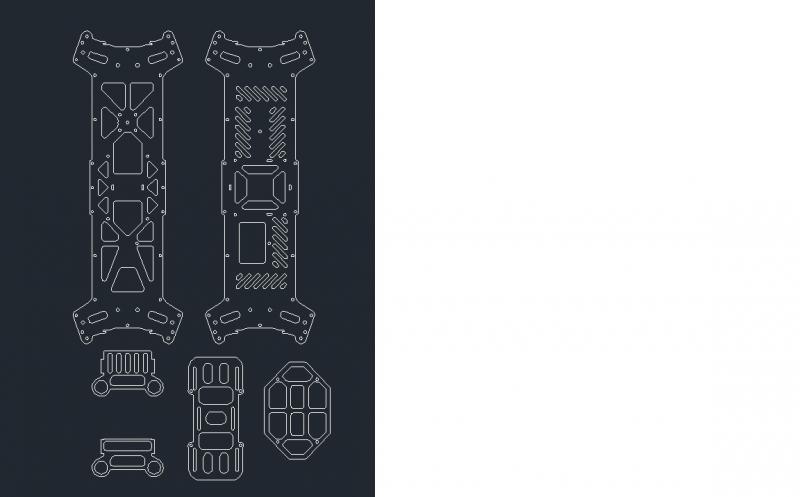
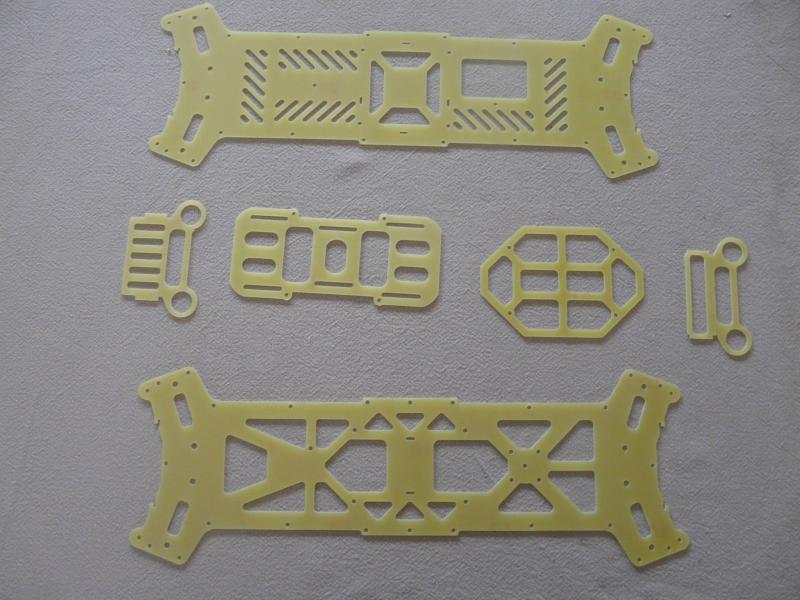
Ik vond het QAV 500 platform bijzonder mooi van vormgeving, en besloot dat als basisidee te nemen voor mijn nieuwe quad.
Op de QAV 500 kan een apart 'electronica-frame' geplaatst worden, waardoor aanpassen van de quad aan zijn payload mogelijk is.
In eerste instantie wil ik zonder camera's vliegen, maar wel met een DJI Naza controller. Deze quad wordt te kostbaar (in werkuren) om er een KK bordje in te zetten.
Mijn setup wordt:
- een uit te werken frame op basis van de QAV 500
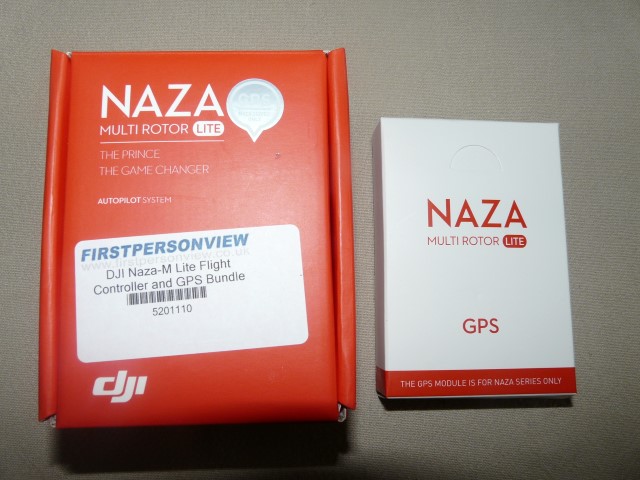
- DJI Naza lite met GPS (is eindelijk betaalbaar geworden)
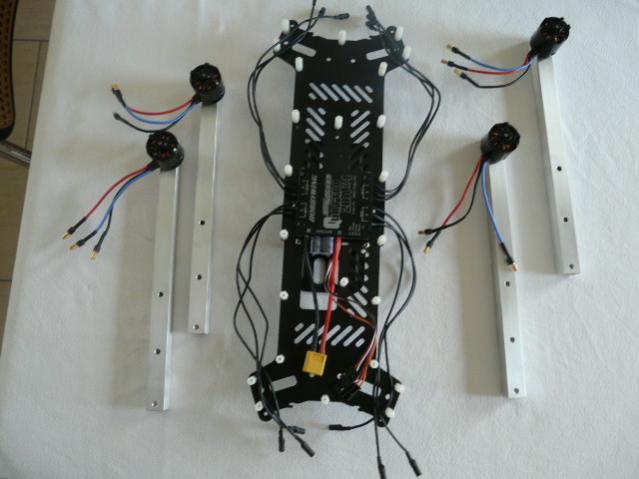
- Sunnysky motoren
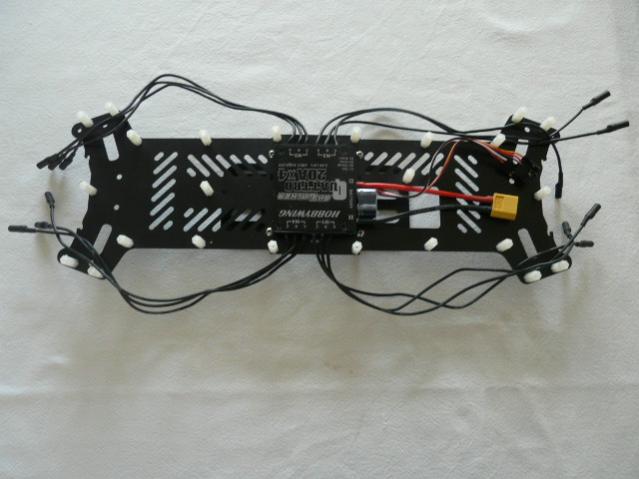
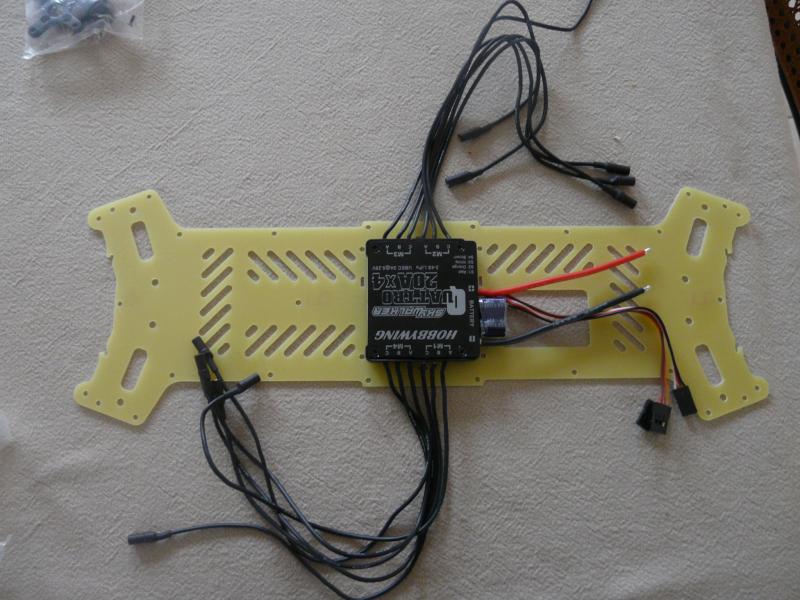
- 4-in-1 ESC speciaal voor quads
- Assan ontvanger
De quad moet voor FPV gebruikt kunnen worden, maar ook camera-loos te gebruiken zijn.
Vooral de ligging van het zwaartepunt moet juist zijn, dus een ombouw tussen FPV en camera-loos is bijna niet uit te sluiten.
Ik vond het QAV 500 platform bijzonder mooi van vormgeving, en besloot dat als basisidee te nemen voor mijn nieuwe quad.
Op de QAV 500 kan een apart 'electronica-frame' geplaatst worden, waardoor aanpassen van de quad aan zijn payload mogelijk is.
In eerste instantie wil ik zonder camera's vliegen, maar wel met een DJI Naza controller. Deze quad wordt te kostbaar (in werkuren) om er een KK bordje in te zetten.
Mijn setup wordt:
- een uit te werken frame op basis van de QAV 500
- DJI Naza lite met GPS (is eindelijk betaalbaar geworden)
- Sunnysky motoren
- 4-in-1 ESC speciaal voor quads
- Assan ontvanger



")