Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Bouwverslag trimaran
- Topicstarter modelzeiler
- Startdatum
Hoi,
Wil je het echt allemaal weten?
Hier komt de lijst:
-bredere draagarm, van 120 cm naar minimaal 150 cm
-stijvere draagarm, koolstof in plaats van aluminium
-romp rond de mast verstevigen
-mastvoet verstevigen
-mast korter
-mast naar achteren
-zijrompen naar voren t.o.v. de middenromp
-stijvere draagvleugels en roer, composieten in plaats van hout
-dikkere roeras en roerkoker
-rvs roeras i.p.v. messing
-houder van de roerkoker verstevigen
-rompen op verschillende plaatsen verstevigen
-rompen gladder maken
-antennedraad hoger plaatsen
En er zijn vast nog wel een aantal andere klusjes.
Groet Eduard
Wil je het echt allemaal weten?
Hier komt de lijst:
-bredere draagarm, van 120 cm naar minimaal 150 cm
-stijvere draagarm, koolstof in plaats van aluminium
-romp rond de mast verstevigen
-mastvoet verstevigen
-mast korter
-mast naar achteren
-zijrompen naar voren t.o.v. de middenromp
-stijvere draagvleugels en roer, composieten in plaats van hout
-dikkere roeras en roerkoker
-rvs roeras i.p.v. messing
-houder van de roerkoker verstevigen
-rompen op verschillende plaatsen verstevigen
-rompen gladder maken
-antennedraad hoger plaatsen
En er zijn vast nog wel een aantal andere klusjes.
Groet Eduard
Hij ligt momenteel een beetje te verstoffen, ik heb het vrij druk gehad met mijn studie dus ik denk dat ik in de zomervakantie er maar eens wat aan moet gaan doen. Heb er wel een standaard voor geklust.
Groet Eduard
Groet Eduard
pompebled
Forum veteraan
He Jan,
Zeilrobot inbouwen die de zeilen automatisch lost bij te veel helling, heb ik ook gedaan, werkt bliksemsnel
Hallo René,
Hoe heb je dat geschakeld?
Wordt de schoot mechanisch gelost?
Hoe haal je 'm daarna weer aan?
Werk je met een winch of een servo?
Groeten, Jan.
Hoi Jan
Heb een microcontroller gebruikt , die via een hellings sencor de controle van de schoot overneemt, gebeurd dus electro mecanisch.
Heb wel een zelfgebouwde winch krachtig en snel, heeft ook kontrole op
schootspanning. Ik weet niet welke opleiding je volgd maar tot een jaar of 5 geleden had ik ok maar een basis kennis van electronica ben via internet robot op site van PARALLAX aan leerprograma's en een hele bib met prog.
geraakt kunt ge uw eigen toepassingen bouwen en programeren.
Op mijn weblog kun je een paar foto's vinden, lees daar de uitleg, voor verdere vragen en antwoorden kun je hier posten
http://isola2.blogspot.com/
Heb een microcontroller gebruikt , die via een hellings sencor de controle van de schoot overneemt, gebeurd dus electro mecanisch.
Heb wel een zelfgebouwde winch krachtig en snel, heeft ook kontrole op
schootspanning. Ik weet niet welke opleiding je volgd maar tot een jaar of 5 geleden had ik ok maar een basis kennis van electronica ben via internet robot op site van PARALLAX aan leerprograma's en een hele bib met prog.
geraakt kunt ge uw eigen toepassingen bouwen en programeren.
Op mijn weblog kun je een paar foto's vinden, lees daar de uitleg, voor verdere vragen en antwoorden kun je hier posten
http://isola2.blogspot.com/
")
mc van Parallax naam propeller, taal assembler of spesiale hogere taal spin
heb zelf alles in spin geprogrameert maar wel stuken uit bib van parallax gebruikt die in assembler waren geschreven
mc van Parallax naam basic stamp BS2 was mijn vorige uitvoering simpeler te programeren maar met minder mogelijkheden
Op deze link vind je het hele gama
http://www.parallax.com/
Verdeler voor NL Bel
Antratek Electronics
heb zelf alles in spin geprogrameert maar wel stuken uit bib van parallax gebruikt die in assembler waren geschreven
mc van Parallax naam basic stamp BS2 was mijn vorige uitvoering simpeler te programeren maar met minder mogelijkheden
Op deze link vind je het hele gama
http://www.parallax.com/
Verdeler voor NL Bel
Antratek Electronics
") ) kan ik je de originele file als bijlage opsturen .
) kan ik je de originele file als bijlage opsturen .Ik ben inmiddels weer een beetje met de boot bezig. Ik ben nu een draagarm aan het fabriceren uit balsahout en glasvezel/epoxy. Alleen zoek ik nu nog een manier om de draagarm snel aan de rompen te kunnen bevestigen, een soort van kliksysteem wat makkelijk te maken is. Heeft iemand een idee? de oude draagarm werd bevestigd met boutjes en moertjes maar dat is niet echt praktisch en mooi.
Hier een paar foto's van de draagarm in aanbouw:


Groet Eduard
Hier een paar foto's van de draagarm in aanbouw:
Groet Eduard
Ik kan het niet helemaal visualiseren, dus als je het uit wilt tekenen graag. Maar iets met neodyniummagneten klinkt als een goed idee.
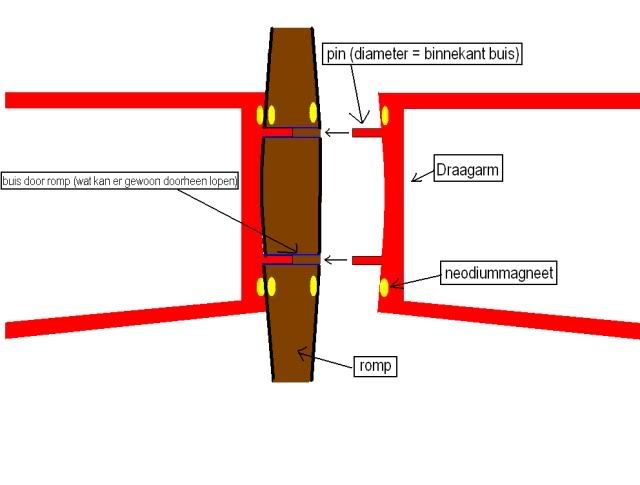
Nu is het me duidelijk wat je bedoeld, alleen is de draagarm een geheel en is het de bedoeling dat hij bovenop de rompen komt. Maar je hebt me wel een eind opweg geholpen. Merci
Groet Eduard
Groet Eduard
Om je tri te stabiliseren zou je ook een "Lage regler" uit de duikboot hoek kunnen gebruiken.
Je kunt dan een servo met een contra gewicht gebruiken, deze wordt door de lage regler bediend.
Bij een stabiele ligging van je boot doet de regelaar niets, maar zodra de boot schuin komt te liggen zal de regelaar dit willen compenseren door de servo met het contragewicht te bedienen, hoe sterker de hoek, hoe verder het contra gewicht naar buiten zal bewegen.
Waarschijnlijk zal een gyro van een heli ook wel werken denk ik ?
Je kunt dan een servo met een contra gewicht gebruiken, deze wordt door de lage regler bediend.
Bij een stabiele ligging van je boot doet de regelaar niets, maar zodra de boot schuin komt te liggen zal de regelaar dit willen compenseren door de servo met het contragewicht te bedienen, hoe sterker de hoek, hoe verder het contra gewicht naar buiten zal bewegen.
Waarschijnlijk zal een gyro van een heli ook wel werken denk ik ?