Naast mijn RC hobby met vliegtuigen en helikopters, ben ik ook met een robot platform bezig. Dit platform wordt aangedreven door 2 dc brushed motors. Daaraan zit vervolgens weer een tandwiel met rupsbanden. De motoren worden aangestuurd door twee parallax Hb-25 controllers. Daarmee kan ik de motoren aansturen alsof het servos zijn. De regelaars hangen weer aan de orange rx die aan mijn DX8 gekoppeld is. Power voor de rx komt uit de Arduino. Power voor de regelaars/motoren komt uit een Lipo accu.
Nu krijg ik de mixing net niet helemaal goed. Ik wil met 1 stick kunnen rijden. Dit is zoals ik het nu heb:
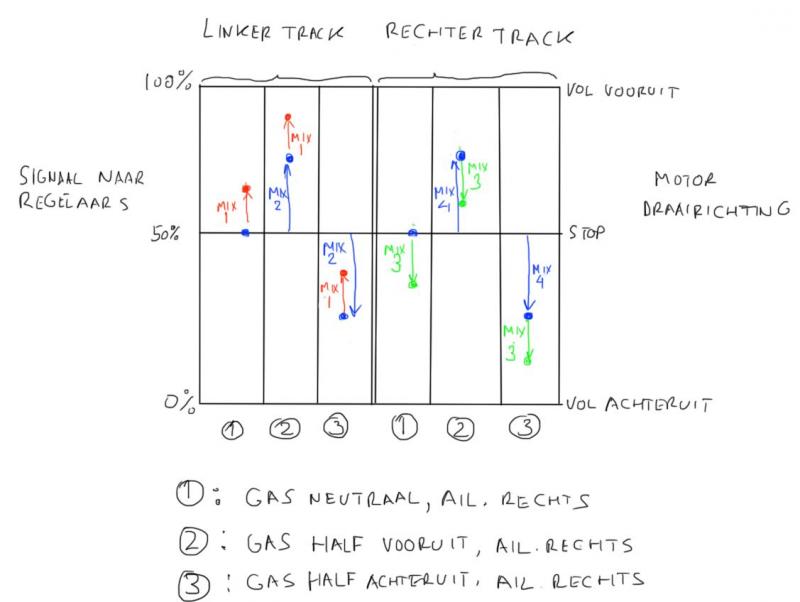
Mid stick geen throttle, dus idle.
Throttle naar voren, beide motoren vol gas vooruit.
Throttle naar beneden, beide motoren 50% achteruit.
Rudder naar links, M1 achteruit M2 vooruit. Naar rechts is het precies andersom.
Dit werkt prima, behalve als ik achteruit rijd en ga sturen, dan gebeurt precies het tegenovergestelde van wat ik wil. Links is dan rechts en vice versa.
Misschien ook niet de meest handige oplossing, dus suggesties zijn welkom. Is het überhaupt wel goed te krijgen met een aircraft tx?

Nu krijg ik de mixing net niet helemaal goed. Ik wil met 1 stick kunnen rijden. Dit is zoals ik het nu heb:
Mid stick geen throttle, dus idle.
Throttle naar voren, beide motoren vol gas vooruit.
Throttle naar beneden, beide motoren 50% achteruit.
Rudder naar links, M1 achteruit M2 vooruit. Naar rechts is het precies andersom.
Dit werkt prima, behalve als ik achteruit rijd en ga sturen, dan gebeurt precies het tegenovergestelde van wat ik wil. Links is dan rechts en vice versa.
Misschien ook niet de meest handige oplossing, dus suggesties zijn welkom. Is het überhaupt wel goed te krijgen met een aircraft tx?





 Nu kan ik ook beter uitleggen wat ik bedoel.
Nu kan ik ook beter uitleggen wat ik bedoel.")
 die ik ook niet aan zou durven passen
die ik ook niet aan zou durven passen 
")