Hi,
Voor de positie van de Naza GPS antenne moet ik in de Naza M V2 wat instellingen (x,y en z) parametreren.
Nu heb ik simpel de afstanden gemeten voor de x, y en z waarden en deze ingegeven in de Naza mbv de assistant software.
Voor de z-waarde heb ik de afstand tussen de GPS antenne en de bodem van de Naza FC aangehouden. Echter ik begrijp dat je eigenlijk de afstand tussen COG van de multicopter en de GPS antenne moet ingeven.
Ik heb de Naza FC op de bovenplaat van de Tarot 680PRO hexacopter ge monteerd en dit is niet het COG punt. Vermoedelijk ligt dit lager daar de accu's en een gimbal+camera onder de bodemplaat van de hexacopter gemonteerd zijn.
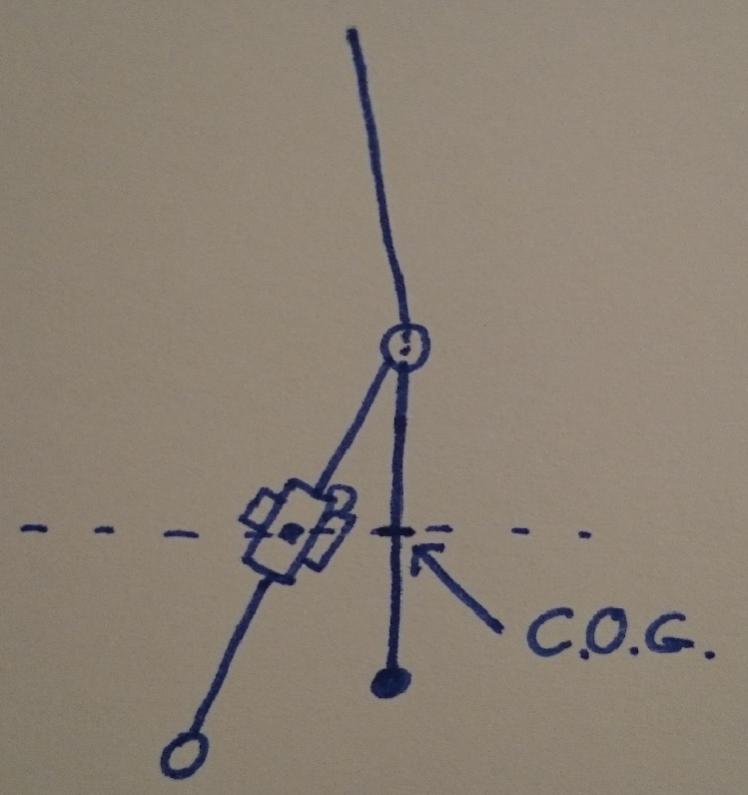
Hoe kan ik simpel het COG punt van mijn multicopter bepalen?
Alvast bedankt,
ET
Voor de positie van de Naza GPS antenne moet ik in de Naza M V2 wat instellingen (x,y en z) parametreren.
Nu heb ik simpel de afstanden gemeten voor de x, y en z waarden en deze ingegeven in de Naza mbv de assistant software.
Voor de z-waarde heb ik de afstand tussen de GPS antenne en de bodem van de Naza FC aangehouden. Echter ik begrijp dat je eigenlijk de afstand tussen COG van de multicopter en de GPS antenne moet ingeven.
Ik heb de Naza FC op de bovenplaat van de Tarot 680PRO hexacopter ge monteerd en dit is niet het COG punt. Vermoedelijk ligt dit lager daar de accu's en een gimbal+camera onder de bodemplaat van de hexacopter gemonteerd zijn.
Hoe kan ik simpel het COG punt van mijn multicopter bepalen?
Alvast bedankt,
ET
")