Vandaag ben ik bezig om te gaan vliegen met de ArduCopter Quad Kit v1.0 met een ArduPilot Mega 2560 board.
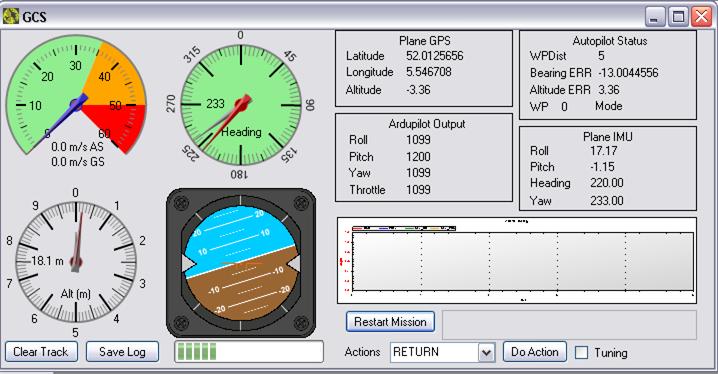
Bij APMplanner0.4.37 is in het tooltje " GCS MAVLink" een horizon meter te zien, het lijkt mij als ik het frame links optil, ik op de horizon meter ook links meer lucht (blauw) zie, maar ik zie dan rechts meer lucht en vice versa.
Ik wil dit graag omgedraaid zien.
Weet iemand waar ik dit kan aanpassen, het probleem wat ik heb is dat de Quadro steeds meer gaat oscilleren en er niet meer uit komt. heb al diverse P values van de Pitch en Roll geprobeerd.
Vermoed dat de oorzaak is dat de correcties juist nu verkeerd gemaakt worden en daardoor dus erger worden.
Ik gebruik op de APM "AC2.0.20Beta]"
De Front pijl op het IMU board wijst in de richting van de voorkant
Bij APMplanner0.4.37 is in het tooltje " GCS MAVLink" een horizon meter te zien, het lijkt mij als ik het frame links optil, ik op de horizon meter ook links meer lucht (blauw) zie, maar ik zie dan rechts meer lucht en vice versa.
Ik wil dit graag omgedraaid zien.
Weet iemand waar ik dit kan aanpassen, het probleem wat ik heb is dat de Quadro steeds meer gaat oscilleren en er niet meer uit komt. heb al diverse P values van de Pitch en Roll geprobeerd.
Vermoed dat de oorzaak is dat de correcties juist nu verkeerd gemaakt worden en daardoor dus erger worden.
Ik gebruik op de APM "AC2.0.20Beta]"
De Front pijl op het IMU board wijst in de richting van de voorkant
Laatst bewerkt:
 klopt het wel.
klopt het wel.