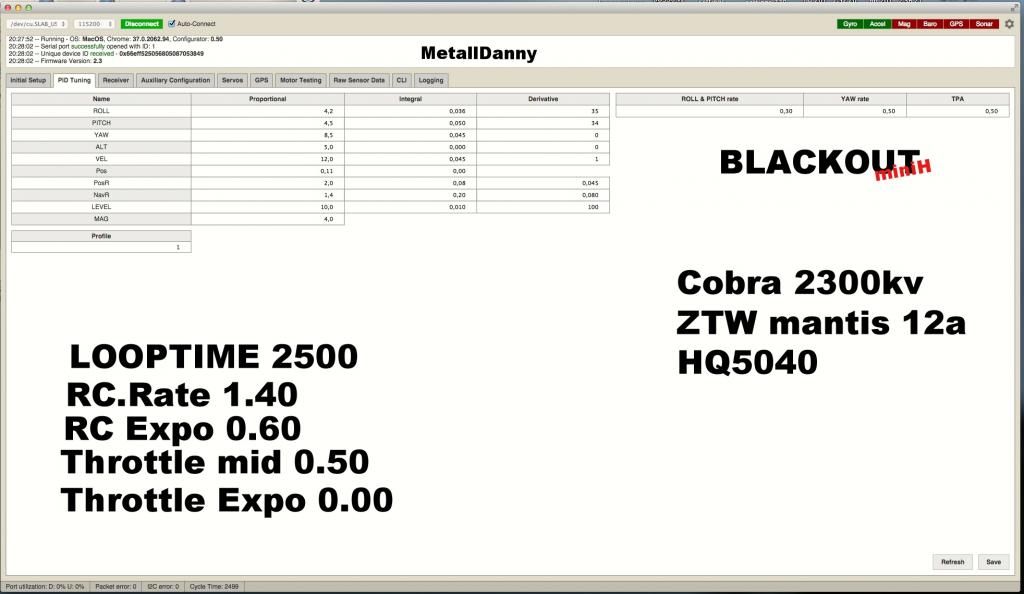
Mag ik vragen welke waarde je dan bij looptime ingevuld hebt en wat het verschil is ?
Ik vraag me ook wel af wat het verschil is met looptime 3500 en 2800?
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Mag ik vragen welke waarde je dan bij looptime ingevuld hebt en wat het verschil is ?
 )
)(Danny heb je evt ook een screen met een hogere resolutie, deze kan ik wel lezen maar merk dat ik hier en daar moet gokken wat er staat
")
Geen probleem man, ik ga die van devil eens checken binnenkort. Op naar zondagdie Lange lijst van Devil is het zelfde als de mijne
sorry had nog geen tijd gehad om een kopie van me pids temaken
even een kleine waarschuwing,
en persoonlijk mis ik de TPA rate.
 ,Nice flight kerel.....
,Nice flight kerel.....