Ik vlieg nu een tijdje met een easystar FPV. Alles hieraan was een proef om te zien of ik het kon, leuk vind en een goede setup heb. Tot op heden verloopt het geweldig. Alleen mijn huidige easystar is redelijk afgeragd en ik heb wat meer wensen voor mijn volgende FPV vliegtuig. Belangrijkste is dat ik in de regel erg weinig tijd heb. Ik wil een kist waar ik een lipo in kan plaatsen, bril op en vliegen maar. Nu moet ik vaak alles bij elkaar zoeken, aansluiten, testen afstellen en hopen dat het werkt.
Ik ben er wel over uit dat het voorlopig een EZ* moet blijven omdat de vliegeigenschappen erg gemoedelijk zijn, wat bij FPV vliegen toch wel erg belangrijk is. Verder wil ik overstappen naar cloverleaf / SPW en een geavanceerde OSD.
Ik heb een nieuwe easystar aangeschaft, in america een setje Cloverleaf / SPW antennes gekocht en een eagletree OSD met logger en GPS aangeschaft.
Als eerste ben ik begonnen mijn oude easystar te ontmantelen
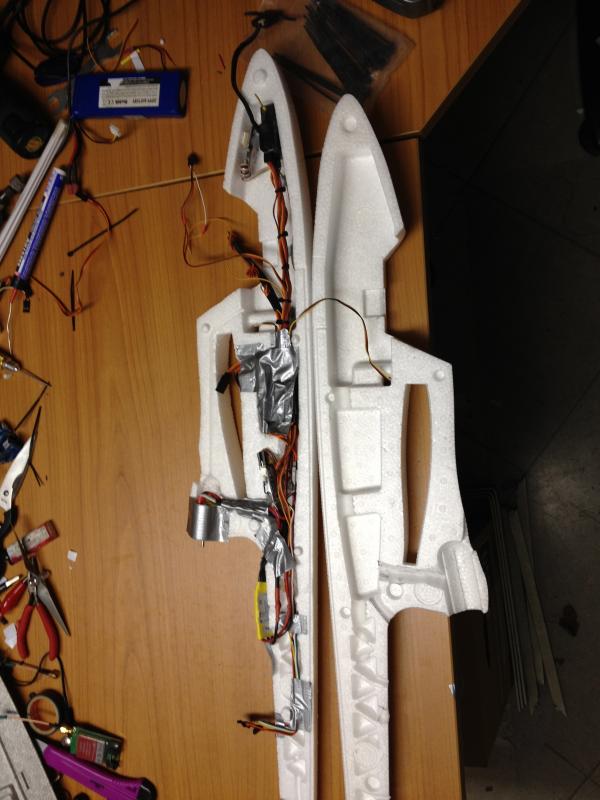
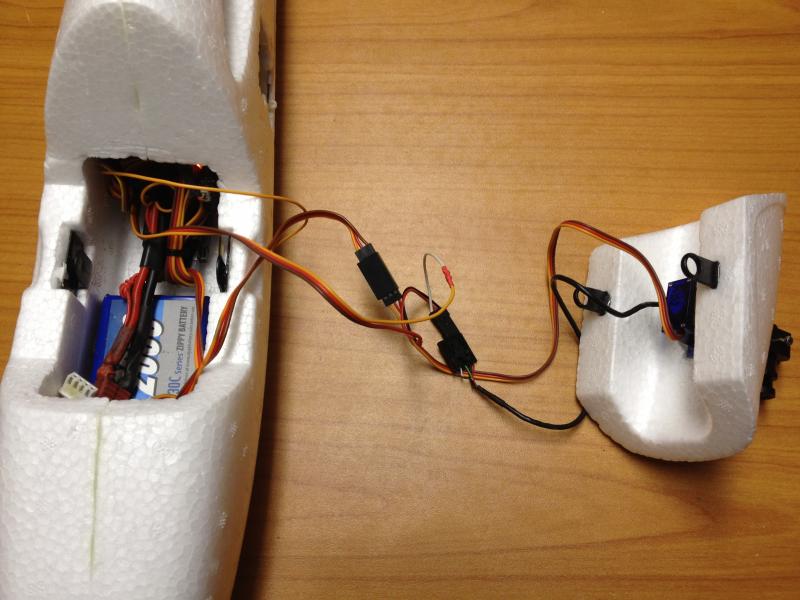
Vervolgens heb ik een testopstelling gemaakt van alle componenten in de nieuwe easystar.

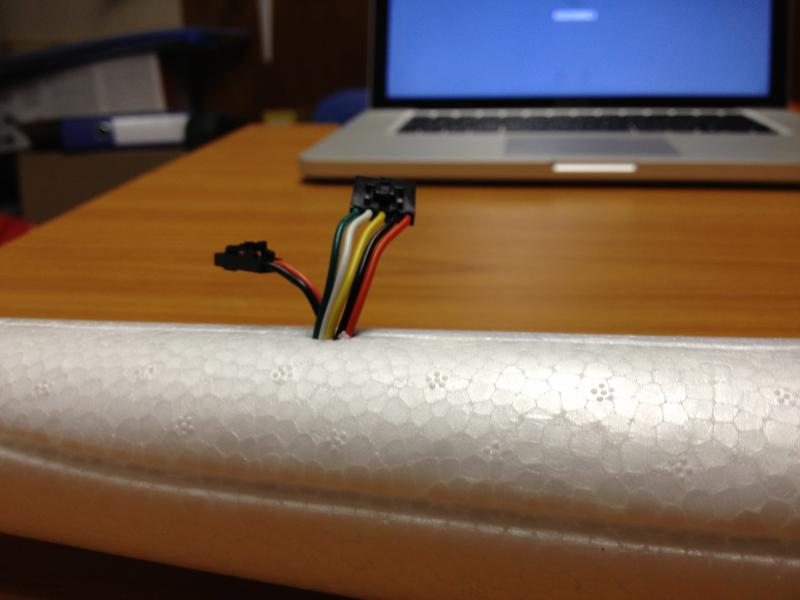
Vervolgens alle kabels op maat gemaakt, getest en tijdelijk vastgezet



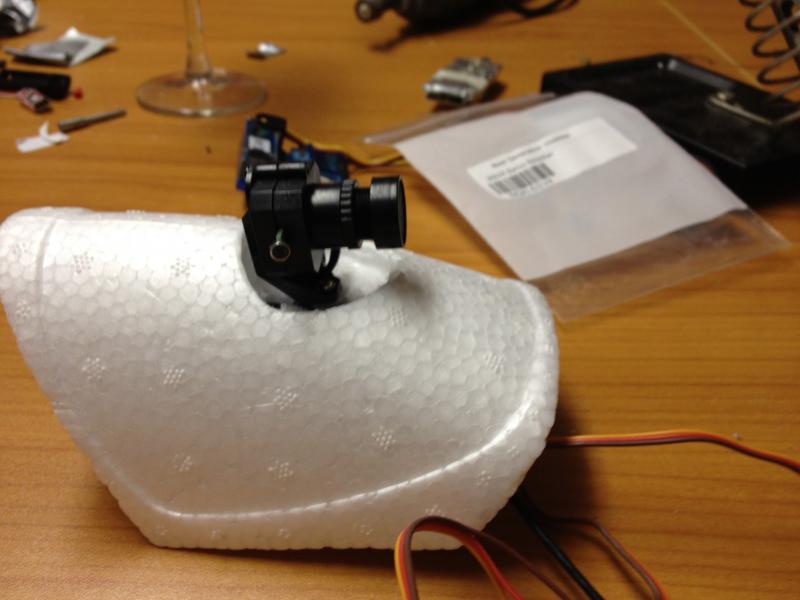
Vervolgens heb ik uit de canopy een rondje gefreesd voor een roteerbare camera
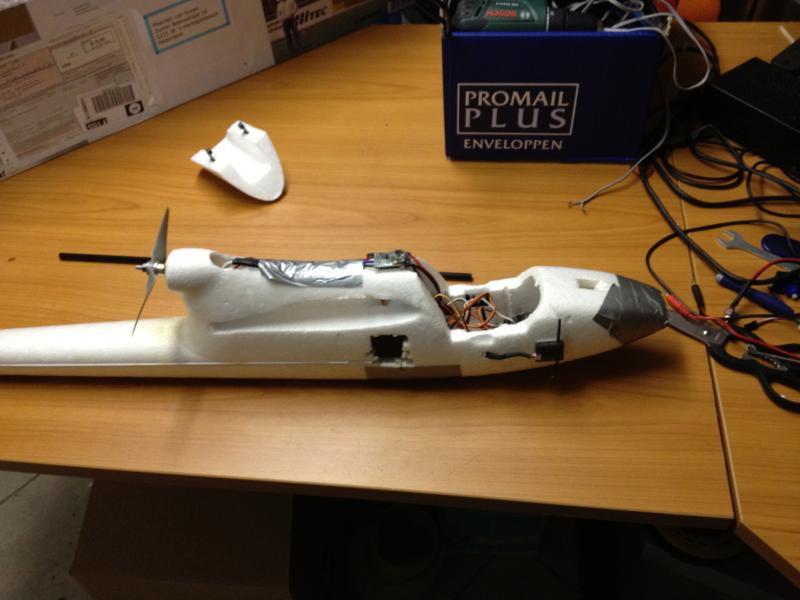
En nadat alles getest was de twee helften verlijmd
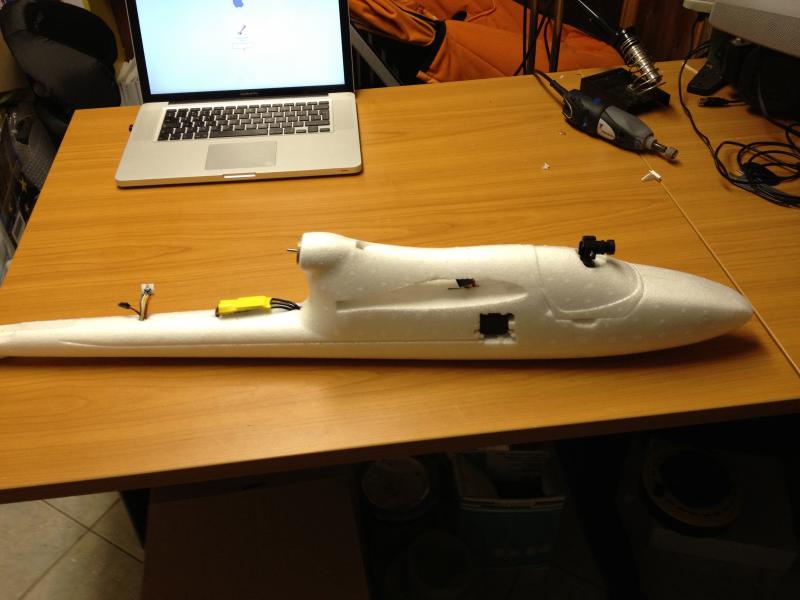

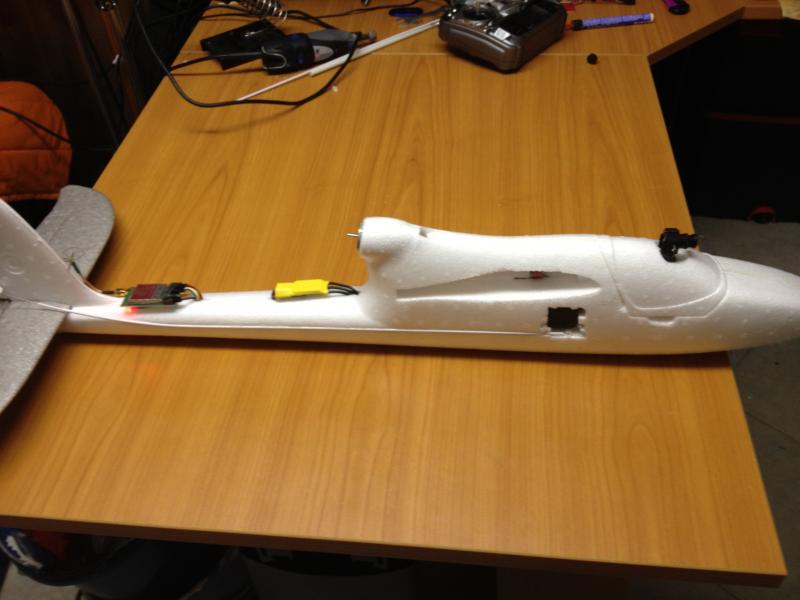

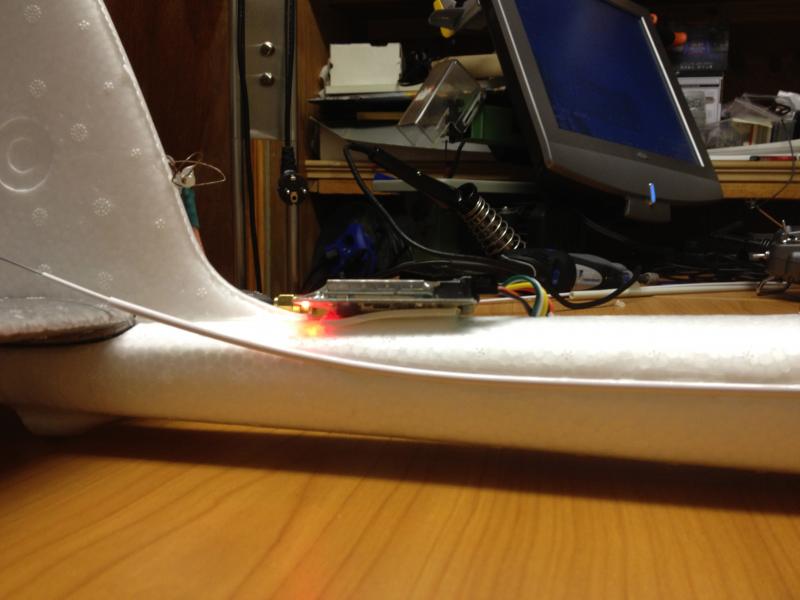
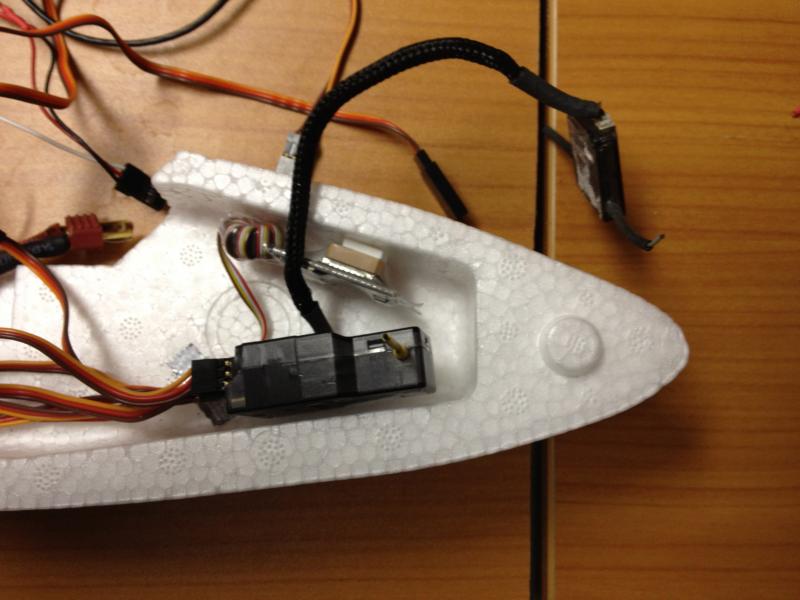
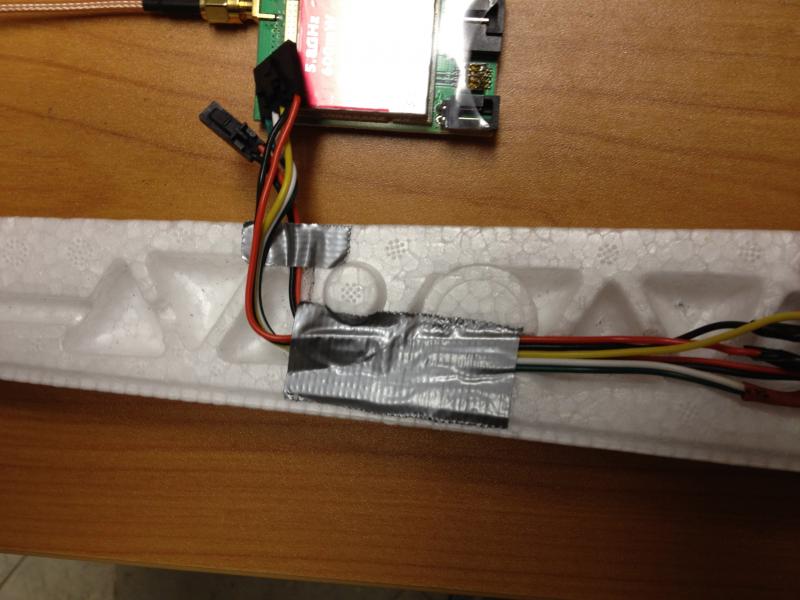
Zoals je kunt zien ligt de 5.8 zender achterop met de cloverleaf antenne. De V3 logger en OSD zitten vast in de "buik". Voorin liggen de ontvanger, lipo en GPS ontvanger. De ontvanger is een Spektrum 7100 met satelliet. Ik heb de rudder gemixed met de ailerons om zo mijn rudder stick vrij te hebben om de camera te bewegen.


Ik moet alleen nog een bescherming maken voor de kabels van de ESC omdat die nu vrij dicht op de prop liggen. Zou wel lullig zijn als de prop zijn ESC draden doorknipt in een vlucht. Daar moet ik nog iets op bedenken. Dat doe ik de volgende keer anders in ieder geval.
Al met al is het redelijk gelukt denk ik. Het beeld is helder en storingsvrij, de grondtesten zijn goed gelukt tot op heden. Nu nog wachten op vliegweer.... (en een beetje temperatuur)
Ik ben er wel over uit dat het voorlopig een EZ* moet blijven omdat de vliegeigenschappen erg gemoedelijk zijn, wat bij FPV vliegen toch wel erg belangrijk is. Verder wil ik overstappen naar cloverleaf / SPW en een geavanceerde OSD.
Ik heb een nieuwe easystar aangeschaft, in america een setje Cloverleaf / SPW antennes gekocht en een eagletree OSD met logger en GPS aangeschaft.
Als eerste ben ik begonnen mijn oude easystar te ontmantelen
Vervolgens heb ik een testopstelling gemaakt van alle componenten in de nieuwe easystar.
Vervolgens alle kabels op maat gemaakt, getest en tijdelijk vastgezet
Vervolgens heb ik uit de canopy een rondje gefreesd voor een roteerbare camera
En nadat alles getest was de twee helften verlijmd
Zoals je kunt zien ligt de 5.8 zender achterop met de cloverleaf antenne. De V3 logger en OSD zitten vast in de "buik". Voorin liggen de ontvanger, lipo en GPS ontvanger. De ontvanger is een Spektrum 7100 met satelliet. Ik heb de rudder gemixed met de ailerons om zo mijn rudder stick vrij te hebben om de camera te bewegen.
Ik moet alleen nog een bescherming maken voor de kabels van de ESC omdat die nu vrij dicht op de prop liggen. Zou wel lullig zijn als de prop zijn ESC draden doorknipt in een vlucht. Daar moet ik nog iets op bedenken. Dat doe ik de volgende keer anders in ieder geval.
Al met al is het redelijk gelukt denk ik. Het beeld is helder en storingsvrij, de grondtesten zijn goed gelukt tot op heden. Nu nog wachten op vliegweer.... (en een beetje temperatuur)
Laatst bewerkt door een moderator: