Hallo Allemaal,
Zoals jullie wellicht al wisten (anders bij deze), heb ik een Servo-Slow schakeling gemaakt die men via een Multi-Switch kan bedienen.
Nu heb ik de software zodanig aangepast, dat deze nu nog beter te gebruiken is voor een lift-as systeem.
De aansturing werkt als volgt:
Tijdens de 1e setup, kun je 2 posities programmeren.
De positie voor de gelifte as, is net voor de mechanische eind-stop van de servo....
De niet gelifte as positie is zover als het nodig is...
Hierna is de setup klaar en is aansturing klaar voor gebruik.
Met een jumper kan men de juiste optie kiezen, waar men de servo wilt laten beginnen (als de Multi-Switch nog uit staat).
Dit kan dus in gelifte positie zijn, of in de niet gelifte positie.
Dit is maar net, wat je het meeste toepast.
De servo-hevel zal in de gelifte stand, net iets door die dodehoek moeten staan.
Zodra de servo namelijk in die positie komt, krijgt de servo geen pulsjes meer !
Dit bespaart een hoop energie vanuit de accu.
Mocht de as door zijn veerpakket weer terug zakken...
Dan kan de as niet verder zakken, doordat de servo dan op zijn mechanische eind-stop staat/komt.
Zodra je de Multi-Switch activeerd, zal de servo naar de andere positie veranderen.
Ook in de niet gelifte positie, zal de servo geen pulsjes meer ontvangen !
Verder is het slim, om de lift-as middels een dun staaldraad of met een sterk dun touw te hijsen.
Op deze manier kan de as ook als dragende as gebruikt worden !
Hier de print-opstelling:
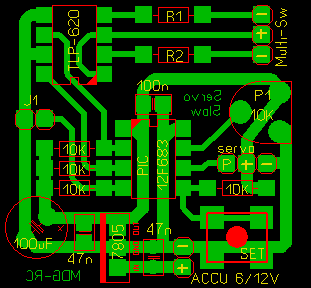
De Multi-Switch kan overigens een negatief of een positief schakelende type zijn.
Verder zit er standaard een eigen 5V (7805) voeding op.
(Het kan ook direct via de zender aangestuurd worden en kan daardoor op een kleinere print !)
Hier een video van de werking:
Dit geeft een duidelijker beeld, dan een hele woord-uitleg

PS) let a.u.b. niet op de mechanische opstelling !
Met het laatste deel, is goed te zien dat de servo iets verder dan een bepaald punt gaat...
Waardoor de servo uiteindelijk, tot aan zijn mechanische eind-stop wordt doorgetrokken...
Door de veerkracht van de dragende as !
Hierna is het verbruik van de servo nihil tot niks
Zoals jullie wellicht al wisten (anders bij deze), heb ik een Servo-Slow schakeling gemaakt die men via een Multi-Switch kan bedienen.
Nu heb ik de software zodanig aangepast, dat deze nu nog beter te gebruiken is voor een lift-as systeem.
De aansturing werkt als volgt:
Tijdens de 1e setup, kun je 2 posities programmeren.
De positie voor de gelifte as, is net voor de mechanische eind-stop van de servo....
De niet gelifte as positie is zover als het nodig is...
Hierna is de setup klaar en is aansturing klaar voor gebruik.
Met een jumper kan men de juiste optie kiezen, waar men de servo wilt laten beginnen (als de Multi-Switch nog uit staat).
Dit kan dus in gelifte positie zijn, of in de niet gelifte positie.
Dit is maar net, wat je het meeste toepast.
De servo-hevel zal in de gelifte stand, net iets door die dodehoek moeten staan.
Zodra de servo namelijk in die positie komt, krijgt de servo geen pulsjes meer !
Dit bespaart een hoop energie vanuit de accu.
Mocht de as door zijn veerpakket weer terug zakken...
Dan kan de as niet verder zakken, doordat de servo dan op zijn mechanische eind-stop staat/komt.
Zodra je de Multi-Switch activeerd, zal de servo naar de andere positie veranderen.
Ook in de niet gelifte positie, zal de servo geen pulsjes meer ontvangen !
Verder is het slim, om de lift-as middels een dun staaldraad of met een sterk dun touw te hijsen.
Op deze manier kan de as ook als dragende as gebruikt worden !
Hier de print-opstelling:
De Multi-Switch kan overigens een negatief of een positief schakelende type zijn.
Verder zit er standaard een eigen 5V (7805) voeding op.
(Het kan ook direct via de zender aangestuurd worden en kan daardoor op een kleinere print !)
Hier een video van de werking:
Dit geeft een duidelijker beeld, dan een hele woord-uitleg
Met het laatste deel, is goed te zien dat de servo iets verder dan een bepaald punt gaat...
Waardoor de servo uiteindelijk, tot aan zijn mechanische eind-stop wordt doorgetrokken...
Door de veerkracht van de dragende as !
Hierna is het verbruik van de servo nihil tot niks
Laatst bewerkt door een moderator:
 dan komt m'n pb aan!
dan komt m'n pb aan!")

