S
sandermt2
Guest
Na lang afwezig te zijn geweest in de modelbouw (en op dit forum), ga ik nu opnieuw aan de slag met een andere tak van de RC: quadcopters.
Ik heb al een aantal maanden een Gopro, die ik voornamelijk voor actiesporten gebruik. Nadat ik de DJI Phantom zag, werd mijn interesse gewekt om zélf aan de slag te gaan met een kit. Uiteindelijk heb ik hier op het forum een TBS Discovery overgekocht. In dit topic zal ik alle vorderingen, (her)bouwfoto's en aanpassingen bijhouden.
Aangezien ik nog niet erg vertrouwd ben met alles wat er bij quadcopters komt kijken, zullen er ook nog wel de bijhorende vragen bij komen.
Hoe ik de TBS Discovery vandaag ontvangen heb:

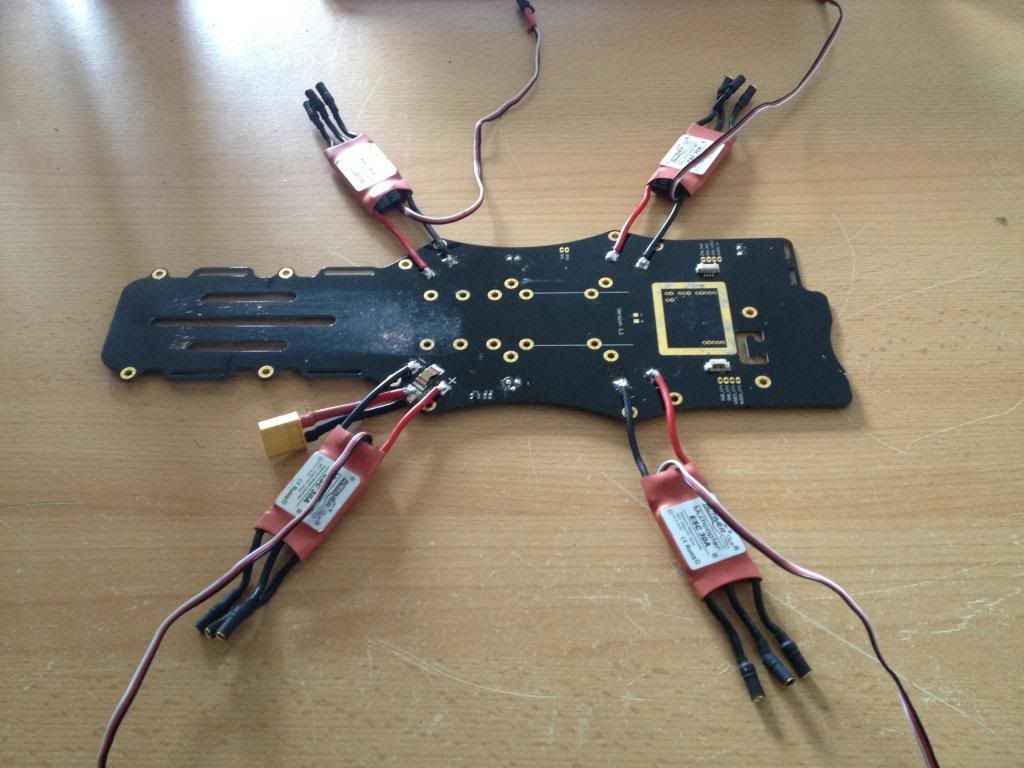
Volledig (en heel netjes) gebouwd. Toch heb ik besloten hem volledig uit elkaar te halen. Niet alleen om hem een beetje schoon te maken, maar ook zodat ik precies weet hoe hij in elkaar zit. Dan weet ik nadien ook hoe hij hersteld kan worden.

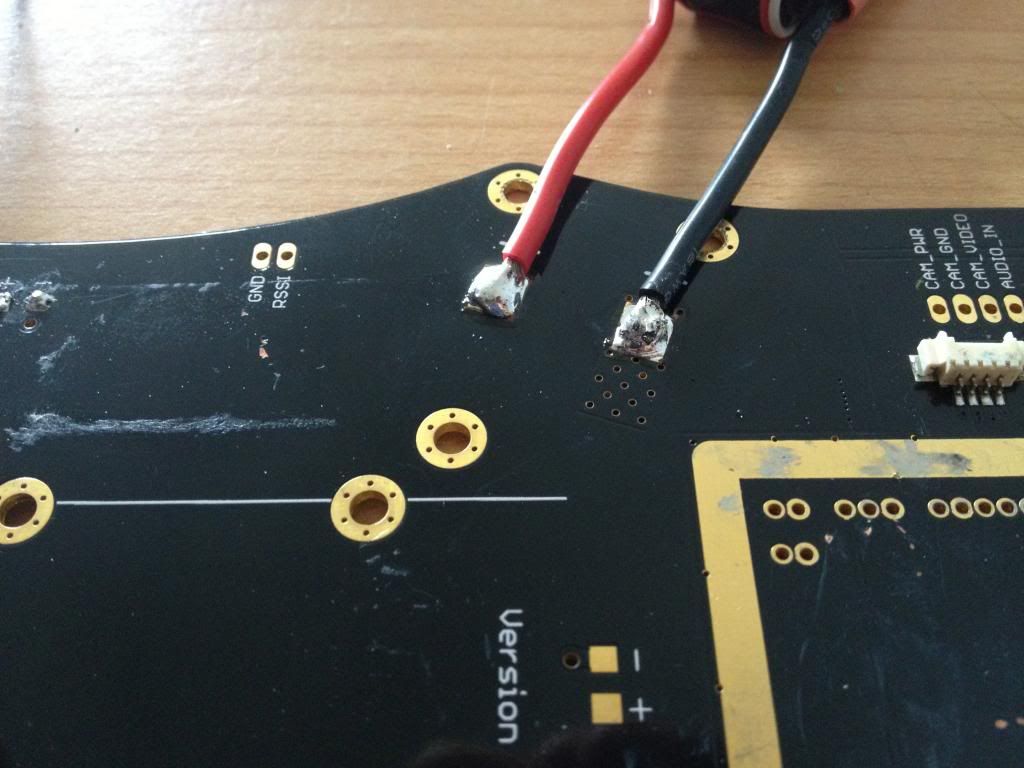
De contactpunten schoongemaakt en de regelaars opnieuw gesoldeerd:
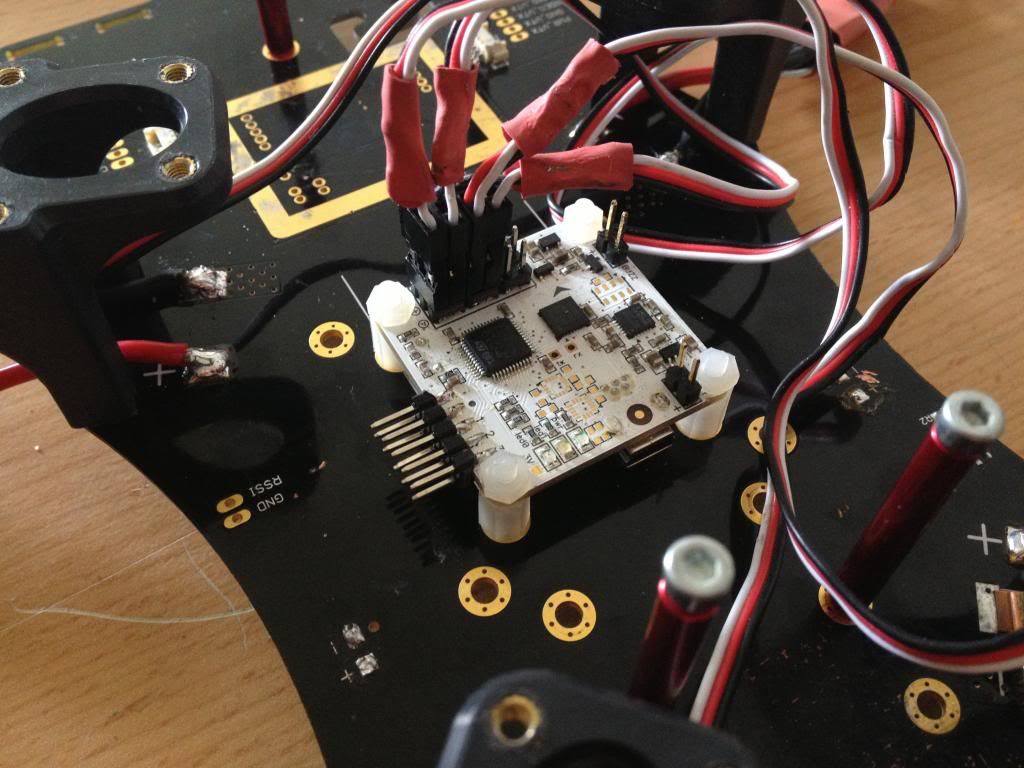
De flightcontroller die ik gebruik (en die bijgeleverd was door de vorige eigenaar) is de Naze32. Als ik het zo hoor is dat een meer dan compleet bordje, waar nadien zelfs nog een GPS op kan aangesloten worden.
De Naze heb ik vervolgens dus ook opnieuw geïnstalleerd en aangesloten. Samen met de DJI450 armen:

Het voordeel van zo'n heropbouw is dat ik verplicht ben om alle manuals ook eens opnieuw te lezen. Zo kwam ik erachter dat de rode 5v draadjes uit de ESC-stekkers verwijderd waren met een reden. Nog later kwam ik erachter dat 1 5v draadje niet verwijderd mocht worden om de Naze32 van stroom te voorzien. Logisch natuurlijk.
Hier dus ook opnieuw de ESC-stekkers aangesloten op het bordje. (De rode krimpkousjes worden nog vervangen door zwarte!)
Ik gebruik gewoon de standaard DJI motoren. Lijken mij vrij "mainstream" als ik de andere bouwverslagen zo bekijk:

Verder dan dat ben ik vandaag nog niet geraakt. Dus de rest volgt morgen of overmorgen.
Zojuist ook een Turnigy 9x van iemand kunnen overkopen, dus die zal komende week ook wel hier verschijnen.
Om de hele set compleet te maken heb ik nog een lipo-lader en een lipo-alarm nodig.
Aangezien ik te ongeduldig ben om een lipo-alarm online te bestellen en daarop te wachten, ben ik aan het spelen met het idee om er zelf eentje in elkaar te solderen. Ik ben redelijk vaak bezig met elektronica, dus dat zou voor mij eenvoudig én plezierig zijn. Heeft er hier al iemand ervaring met een DIY-lipoalarm?
EDIT: Als er opmerkingen/aanmerkingen zijn, hoor ik het natuurlijk graag. Raad is altijd welkom!
Ik heb al een aantal maanden een Gopro, die ik voornamelijk voor actiesporten gebruik. Nadat ik de DJI Phantom zag, werd mijn interesse gewekt om zélf aan de slag te gaan met een kit. Uiteindelijk heb ik hier op het forum een TBS Discovery overgekocht. In dit topic zal ik alle vorderingen, (her)bouwfoto's en aanpassingen bijhouden.
Aangezien ik nog niet erg vertrouwd ben met alles wat er bij quadcopters komt kijken, zullen er ook nog wel de bijhorende vragen bij komen.
Hoe ik de TBS Discovery vandaag ontvangen heb:

Volledig (en heel netjes) gebouwd. Toch heb ik besloten hem volledig uit elkaar te halen. Niet alleen om hem een beetje schoon te maken, maar ook zodat ik precies weet hoe hij in elkaar zit. Dan weet ik nadien ook hoe hij hersteld kan worden.

De contactpunten schoongemaakt en de regelaars opnieuw gesoldeerd:


De flightcontroller die ik gebruik (en die bijgeleverd was door de vorige eigenaar) is de Naze32. Als ik het zo hoor is dat een meer dan compleet bordje, waar nadien zelfs nog een GPS op kan aangesloten worden.
De Naze heb ik vervolgens dus ook opnieuw geïnstalleerd en aangesloten. Samen met de DJI450 armen:

Het voordeel van zo'n heropbouw is dat ik verplicht ben om alle manuals ook eens opnieuw te lezen. Zo kwam ik erachter dat de rode 5v draadjes uit de ESC-stekkers verwijderd waren met een reden. Nog later kwam ik erachter dat 1 5v draadje niet verwijderd mocht worden om de Naze32 van stroom te voorzien. Logisch natuurlijk.
Hier dus ook opnieuw de ESC-stekkers aangesloten op het bordje. (De rode krimpkousjes worden nog vervangen door zwarte!)

Ik gebruik gewoon de standaard DJI motoren. Lijken mij vrij "mainstream" als ik de andere bouwverslagen zo bekijk:

Verder dan dat ben ik vandaag nog niet geraakt. Dus de rest volgt morgen of overmorgen.
Zojuist ook een Turnigy 9x van iemand kunnen overkopen, dus die zal komende week ook wel hier verschijnen.
Om de hele set compleet te maken heb ik nog een lipo-lader en een lipo-alarm nodig.
Aangezien ik te ongeduldig ben om een lipo-alarm online te bestellen en daarop te wachten, ben ik aan het spelen met het idee om er zelf eentje in elkaar te solderen. Ik ben redelijk vaak bezig met elektronica, dus dat zou voor mij eenvoudig én plezierig zijn. Heeft er hier al iemand ervaring met een DIY-lipoalarm?
EDIT: Als er opmerkingen/aanmerkingen zijn, hoor ik het natuurlijk graag. Raad is altijd welkom!





") Dat komt uiteraard ook allemaal in dit topic.
Dat komt uiteraard ook allemaal in dit topic.  ).
).")