In dit draadje kwam bij mij het idee opborrelen om een oude servo om te bouwen tot een micro regelaar waarmee je een kleine gelijkstroommotor vooruit en achteruit kunt laten gaan. Dit idee is zeker niet nieuw. Zoals je hier kunt lezen heeft Jan al eens een ontwerp gedeeld voor een aantal Futaba servo's waarbij dat kan.
In dit geval gaat het om een zeer bekende servo, de HXT900 van Hobbyking, die ook nog eens spotgoedkoop is. Vandaar dat ik deze hack maar Poor Mans Regelaar (PMR) noem.

Het enige wat we gaan doen is de potmeter in de servo vervangen door 2 vaste weerstanden en ervoor zorgen dat de "deadband" groter wordt. Dat is het middengebied, waarbij de regelaar geen stroom naar de motor stuurt. Als je deze laatste aanpassing niet doet, dan gaat de motor draaien bij de geringste knuppeluitslag.
Het printje in de HXT900
Als je de HXT900 openmaakt kom je het volgende printje tegen
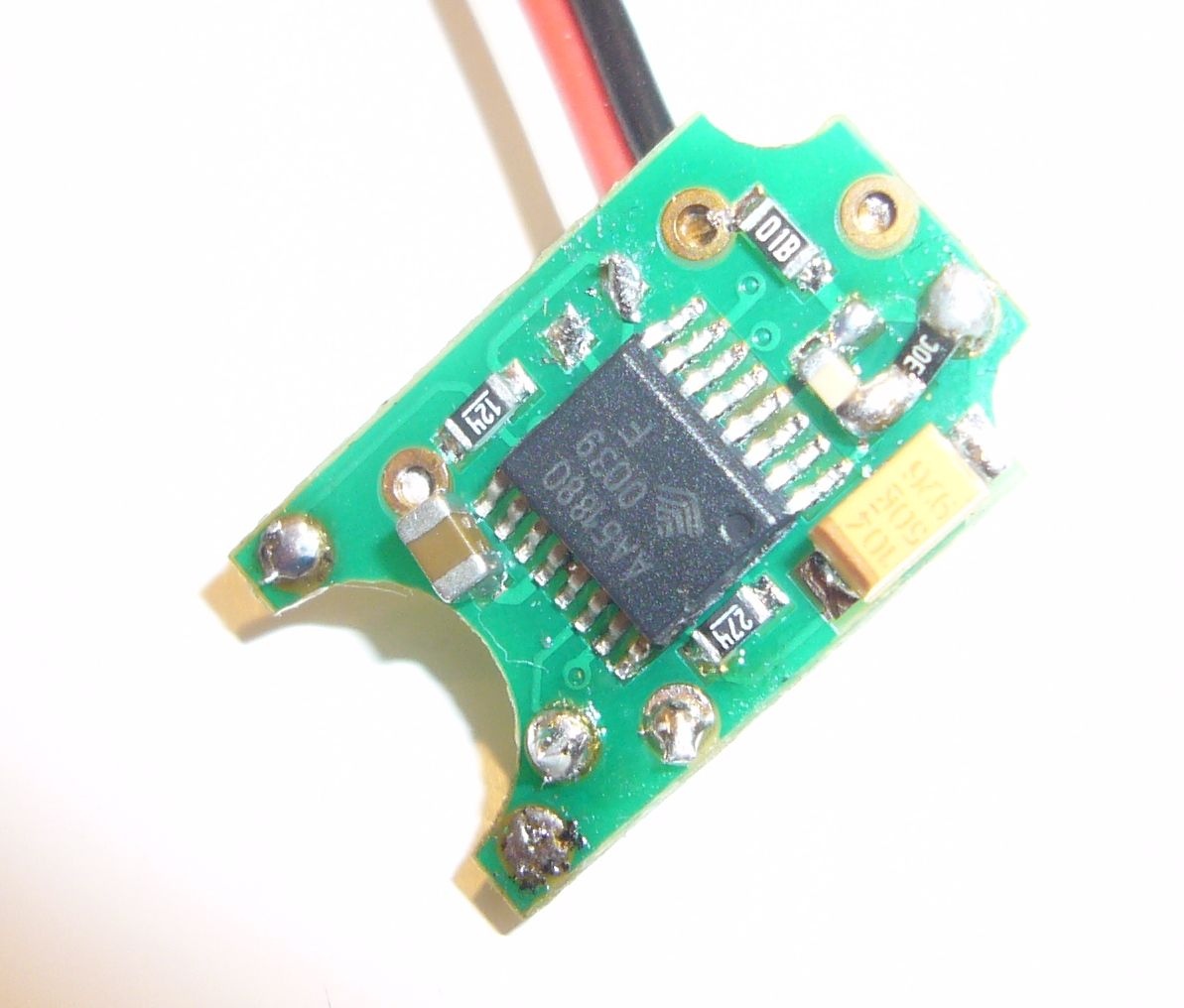
(Ik vermoed dat dit printje in een hoop meer micro servo's zit, zoals bijv. Towerpro. Het zou mooi zijn als mensen dat hier melden.)
Op dit printje zit een AA51880 IC, wat min of meer alles voor z'n rekening neemt. Het leuke van dit IC is dat er een aansluiting op zit, waarmee je de "deadband" kunt instellen. Dat gaan we doen!
Stap 1)
Haal het printje uit de servo en soldeer alle draden, behalve de 3 aderige draad naar de RC-ontvanger, er af.
Stap 2)
Kijk even heel goed naar bovenstaande foto en vervolgens naar je eigen printje, Je ziet dat op bovenstaande foto vlak boven het IC er een SMD weerstand is verdwenen (rechts naast degene die er nog op zit en waarop 124 staat) Soldeer die weerstand er bij jou ook af, zodat het er daarna uitziet als op bovenstaande foto.
Stap 3)
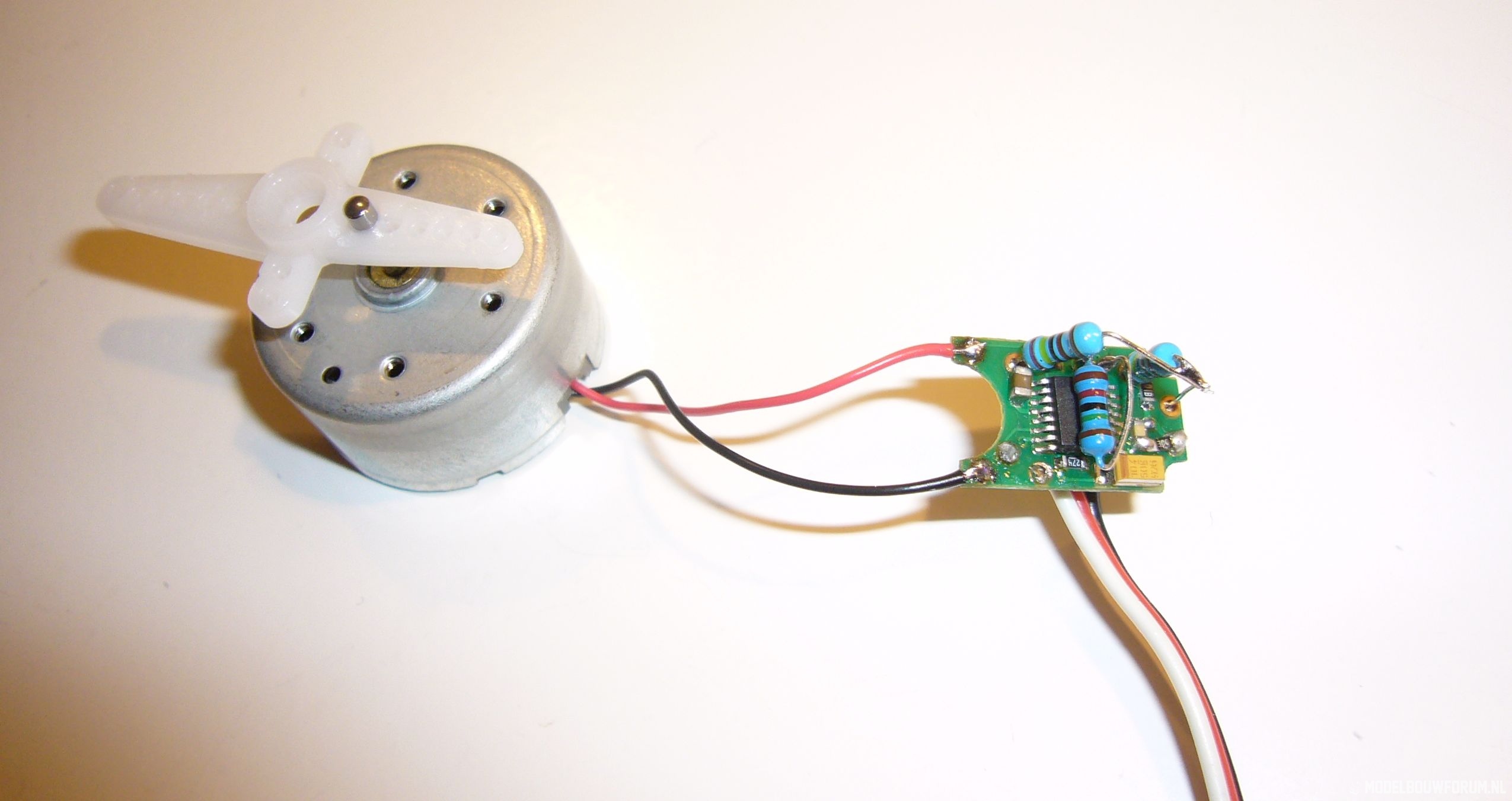
Soldeer op de plaats waar de SMD weerstand (van 1K Ohm) zat een andere weerstand met de waarde 15K Ohm (iets tussen 12K en 18K werkt ook). Zoals je op onderstaande foto ziet heb ik geen SMD weerstanden, maar zo gaat het ook .
.
Let op: Er is maar weinig kracht voor nodig om de twee soldeereilandjes waar de weerstand op vast zit van de print los te trekken. Leg de weerstand op het IC voor je hem vastsoldeert. Soldeer hem dan in die positie vast en lijm hem er daarna meteen aan het IC vast. Nadat hij vast is gesoldeerd moet je er niet meer aan proberen te buigen, want dan scheurt het soldeerpunt van de print en breekt het printspoortje. Vraag me niet hoe ik dat weet

Stap 4)
Waar eerst twee van de drie draden van de potmeter zaten soldeer je een weerstand van 2,5 K Ohm. Zie voor de exacte posities onderstaande foto.

Stap 5)
Soldeer de tweede weerstand van 2,5K Ohm zoals op onderstaande foto. Ik heb deze weerstand aan de linkerkant aan het draadje gesoldeerd van de weerstand uit stap 4). Anders moest ik twee draadjes door één gat op het printje wurmen en dit leek me simpeler. Heb je geen 2,5K Ohm weerstanden, dan neem je iets tussen de 2K en 3K, zolang de twee weerstanden maar gelijk zijn.

Stap 6)
Sluit de motordraden van je gelijkstroom motortje aan. De AA51880 kan 300mW vermogen leveren. Heb je meer nodig, dan staan er in de datasheet schakelingen met transistoren die je kunt bestuderen.
Klaar !
Veel plezier ermee

In dit geval gaat het om een zeer bekende servo, de HXT900 van Hobbyking, die ook nog eens spotgoedkoop is. Vandaar dat ik deze hack maar Poor Mans Regelaar (PMR) noem.
Het enige wat we gaan doen is de potmeter in de servo vervangen door 2 vaste weerstanden en ervoor zorgen dat de "deadband" groter wordt. Dat is het middengebied, waarbij de regelaar geen stroom naar de motor stuurt. Als je deze laatste aanpassing niet doet, dan gaat de motor draaien bij de geringste knuppeluitslag.
Het printje in de HXT900
Als je de HXT900 openmaakt kom je het volgende printje tegen
(Ik vermoed dat dit printje in een hoop meer micro servo's zit, zoals bijv. Towerpro. Het zou mooi zijn als mensen dat hier melden.)
Op dit printje zit een AA51880 IC, wat min of meer alles voor z'n rekening neemt. Het leuke van dit IC is dat er een aansluiting op zit, waarmee je de "deadband" kunt instellen. Dat gaan we doen!
Stap 1)
Haal het printje uit de servo en soldeer alle draden, behalve de 3 aderige draad naar de RC-ontvanger, er af.
Stap 2)
Kijk even heel goed naar bovenstaande foto en vervolgens naar je eigen printje, Je ziet dat op bovenstaande foto vlak boven het IC er een SMD weerstand is verdwenen (rechts naast degene die er nog op zit en waarop 124 staat) Soldeer die weerstand er bij jou ook af, zodat het er daarna uitziet als op bovenstaande foto.
Stap 3)
Soldeer op de plaats waar de SMD weerstand (van 1K Ohm) zat een andere weerstand met de waarde 15K Ohm (iets tussen 12K en 18K werkt ook). Zoals je op onderstaande foto ziet heb ik geen SMD weerstanden, maar zo gaat het ook
.Let op: Er is maar weinig kracht voor nodig om de twee soldeereilandjes waar de weerstand op vast zit van de print los te trekken. Leg de weerstand op het IC voor je hem vastsoldeert. Soldeer hem dan in die positie vast en lijm hem er daarna meteen aan het IC vast. Nadat hij vast is gesoldeerd moet je er niet meer aan proberen te buigen, want dan scheurt het soldeerpunt van de print en breekt het printspoortje. Vraag me niet hoe ik dat weet
Stap 4)
Waar eerst twee van de drie draden van de potmeter zaten soldeer je een weerstand van 2,5 K Ohm. Zie voor de exacte posities onderstaande foto.
Stap 5)
Soldeer de tweede weerstand van 2,5K Ohm zoals op onderstaande foto. Ik heb deze weerstand aan de linkerkant aan het draadje gesoldeerd van de weerstand uit stap 4). Anders moest ik twee draadjes door één gat op het printje wurmen en dit leek me simpeler. Heb je geen 2,5K Ohm weerstanden, dan neem je iets tussen de 2K en 3K, zolang de twee weerstanden maar gelijk zijn.
Stap 6)
Sluit de motordraden van je gelijkstroom motortje aan. De AA51880 kan 300mW vermogen leveren. Heb je meer nodig, dan staan er in de datasheet schakelingen met transistoren die je kunt bestuderen.
Klaar !
Veel plezier ermee
Laatst bewerkt:
")
 Het geringe verlopen van de nulpunten, die je bij erg oude apparatuur nog wel eens had, is niet meer aan de orde, dus daar hoef je geen rekening mee te houden. Bij MHz apparatuur heb je echter nog wel wat jitter. Dit betekent, dat de stuurpulsen continu een paar μs in lengte variëren. Dit wordt voornamelijk veroorzaakt door de manier, waarop de pulsvormer in de ontvanger werkt. Dit verschijnsel wordt ondervangen door de dode slag. Als je je nulpunt erg kritisch instelt zou je hiervan last kunnen hebben als je niks aan de dode slag verandert.
Het geringe verlopen van de nulpunten, die je bij erg oude apparatuur nog wel eens had, is niet meer aan de orde, dus daar hoef je geen rekening mee te houden. Bij MHz apparatuur heb je echter nog wel wat jitter. Dit betekent, dat de stuurpulsen continu een paar μs in lengte variëren. Dit wordt voornamelijk veroorzaakt door de manier, waarop de pulsvormer in de ontvanger werkt. Dit verschijnsel wordt ondervangen door de dode slag. Als je je nulpunt erg kritisch instelt zou je hiervan last kunnen hebben als je niks aan de dode slag verandert.