Inleiding:
Ik had al wat ervaring met RTF multirotors, maar ik zocht toch meer uitdaging.
Toen kwam ik filmpjes van MetallDanny tegen. Tja, dan ben je verkocht!
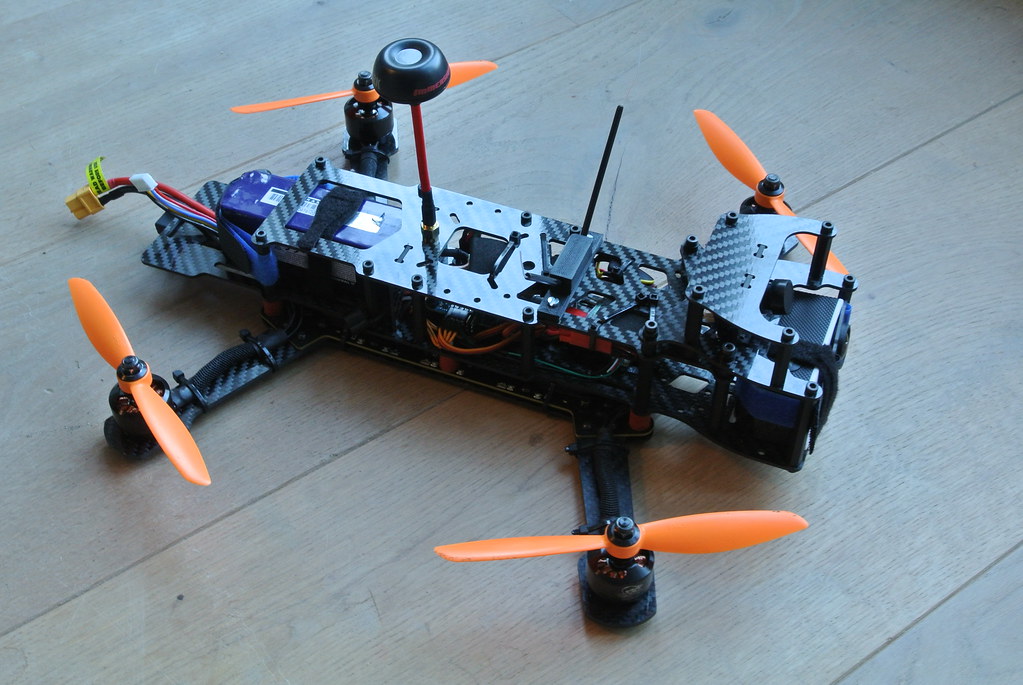
Mede door dit filmpje en na vele uren lezen op verschillende fora kwam ik bij de frames van Blackout uit. Zeer sterke frames die zich al aardig bewezen hebben. Het kost wat, maar dan heb je ook wat! Ik ben voor de B330 gegaan en niet voor de Mini-H door de mogelijkheid om er een gimbal aan te kunnen hangen. Aangezien de B330 aardig wat geld heeft gekost ondertussen, wordt de gimbal nog een tijdje uitgesteld..
Ik heb totaal, maar echt totaal geen kaas gegeten van het hele zelfbouw en FPV gebeuren. Mijn Macbook heeft dus aardig wat internet overuren gemaakt de laatste tijd. Hier op het Modelbouwforum ben ik bij het bouwverslag van BorisB terecht gekomen. Dat heeft me flink op weg geholpen.
Voor de elektronica heb ik onderdelen uit het filmpje van MetallDanny als uitgangspunt genomen. Als alle onderdelen zo’n vlucht overleven, dan moet het wel goed zijn dacht ik zo. Tot nu toe geen spijt van gehad. Alle elektronica werkt nog perfect en ik heb er al aardig wat uurtjes op zitten. Buiten het hele frame met alle elektronica, had ik ook nog geen afstandsbediening en FPV bril. De portemetniks heeft het dus zwaar gehad.
Een vereiste was dat ik grotendeels alle onderdelen in Europa kon halen. Heb teveel negatieve ervaring met shops als Hobbyking. Ik wilde het dus dicht bij huis houden, dat is gelukt!
Het is een ellende lang bouwverslag geworden, maar voor degene die nog nooit een FPV racer gebouwd hebben misschien een mooie verzameling aan info. In ieder geval een samenvatting van alle antwoorden op vragen en problemen waar ik zelf tegenaan liep. Mochten de kenners wat onzin lezen of juist advies hebben, laat maar horen! Uiteindelijk worden we er allemaal weer wijzer van.
Onderdelen:
Ik vond het vooral lastig om shops te vinden voor de juiste onderdelen. Hieronder een lijst van alle onderdelen met een link naar de shops waar onderdelen te koop zijn. Scheelt je weer die extra uren op internet.
- Blackout B330 frame
- Naze32 Acro flight controller + 90gr. headers
- Cobra 2208/20 2000kv motoren
- ZTW A-Series 20A SimonK ESC’s
- HQ6045 glasvezel versterkte propellers
- Turnigy Nano-tech 4S 2200mAh 45/90C Lipo’s
- FrSky Taranis X9D plus zender
- FrSky D4R-II ontvanger
- ImmersionRC 600mW video zender
- ImmersionRC SpiroNET V2 antenne
- Sony 600TVL camera
- Pololu 12 step-up converter
- miniOSD
- servo kabels
- JST pluggen
- XT60 pluggen
- Fatshark Dominator V2
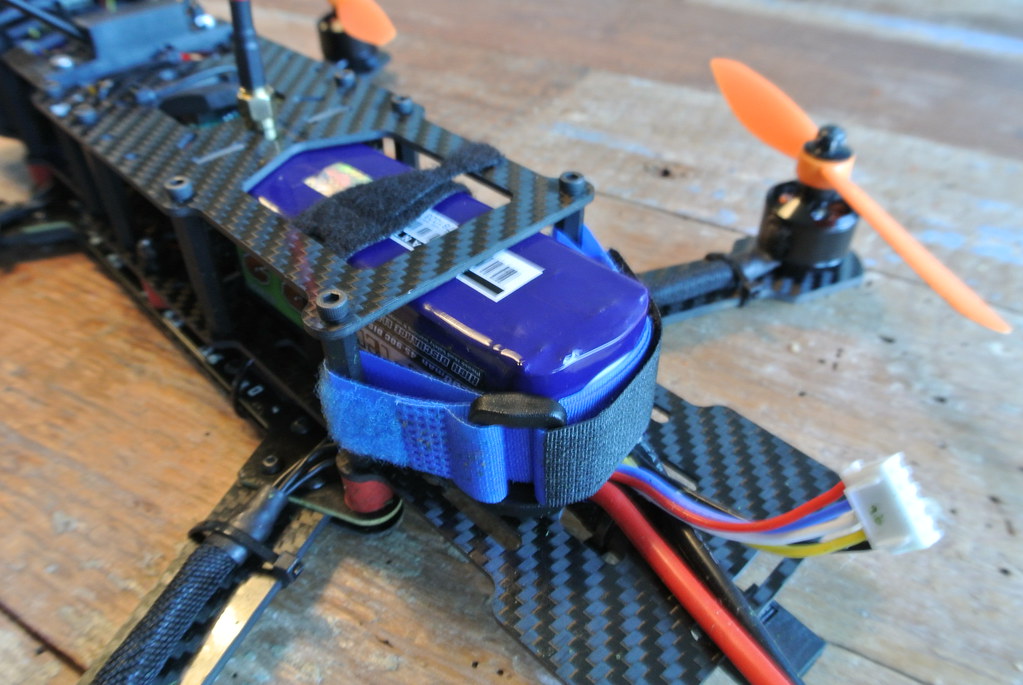
Blackout B330 frame
Het frame zelf valt weinig over te vertellen. Het zit gewoon goed in elkaar en is compleet vervaardigd uit Carbon, bijna niet kapot te krijgen. De CCD addon kit is aan te raden, het beschermt je FPV camera tijdens een crash.
Het Power Distribution Board werkt ideaal voor het aansluiten van de ESC’s. Scheelt je veel kabelwerk in het frame. De ESC’s liggen netjes beschermd tussen de Dirty Plate en PDB. Eén tip.. test de PDB voordat je gaat solderen. Sluit er even snel een Lipo op aan. Ik had twee kapotte LED’s op de PDB. Toch balen als je er pas achter komt wanneer je al aardig wat in elkaar geschroefd hebt. Werd gelukkig netjes en snel vervangen door Multirotorparts voor een nieuwe PDB.
Het enige minpunt van het frame zijn de nylon schroeven. Ik snap niet dat ze zulke slechte kwaliteit schroeven durven te leveren bij zo’n hoogwaardig frame. Ik kreeg van te voren al het advies om ze te vervangen. Na drie crashes bleek het ook nodig te zijn. 90% van de bouten was afgebroken, zelfs de standoff’s waren afgebroken. Uiteindelijk heb ik nu alle nylon bouten en standoff’s vervangen. Je wilt natuurlijk mooi zwarte bouten (cilinderschroef met binnenzeskant M3). Daarvoor kun je terecht bij de meeste modelbouw shops zoals PK-racing en TopRC.
Naze32 Acro
Ik heb nog getwijfeld over de Naze32 Full omdat ik uit het RTF wereldje kom waar je veel functionaliteit vanzelf sprekend al op je multirotor hebt, maar je komt er al snel achter dat de extra functies van de Full overbodig zijn. Bijna alle FPV racers vliegen in de Acro modus, zonder automatische stabilisatie dus! Met het Acro bordje kun je ook nog in Angle en Horizon mode vliegen. De gyro’s houden je Blackout dan stabiel. Een beschrijving tussen Angle en Horizon modus kun je hier vinden.
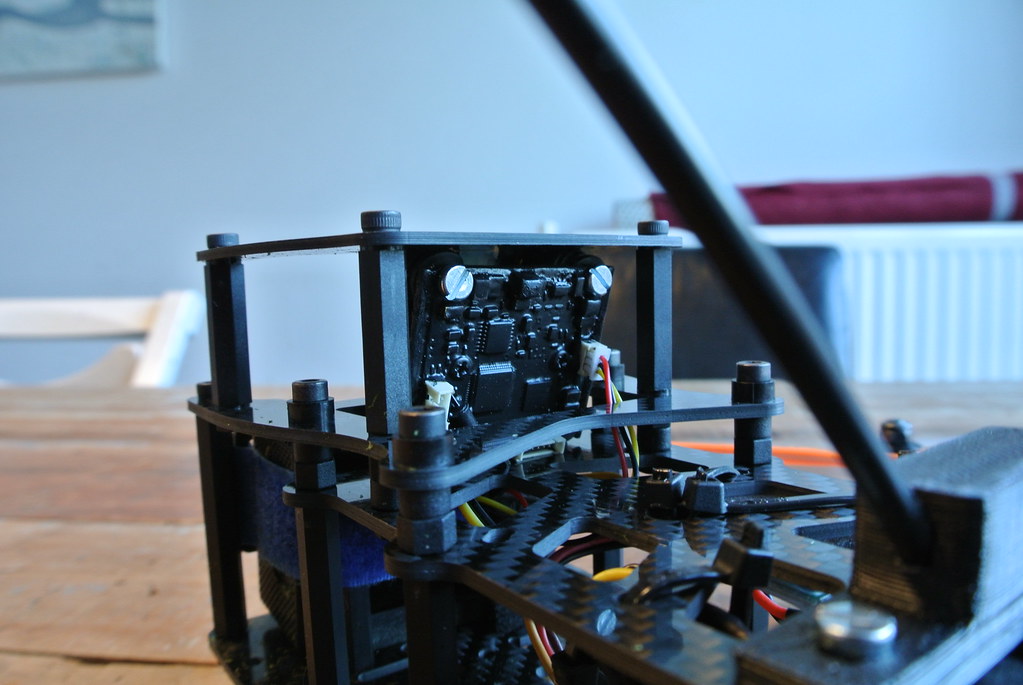
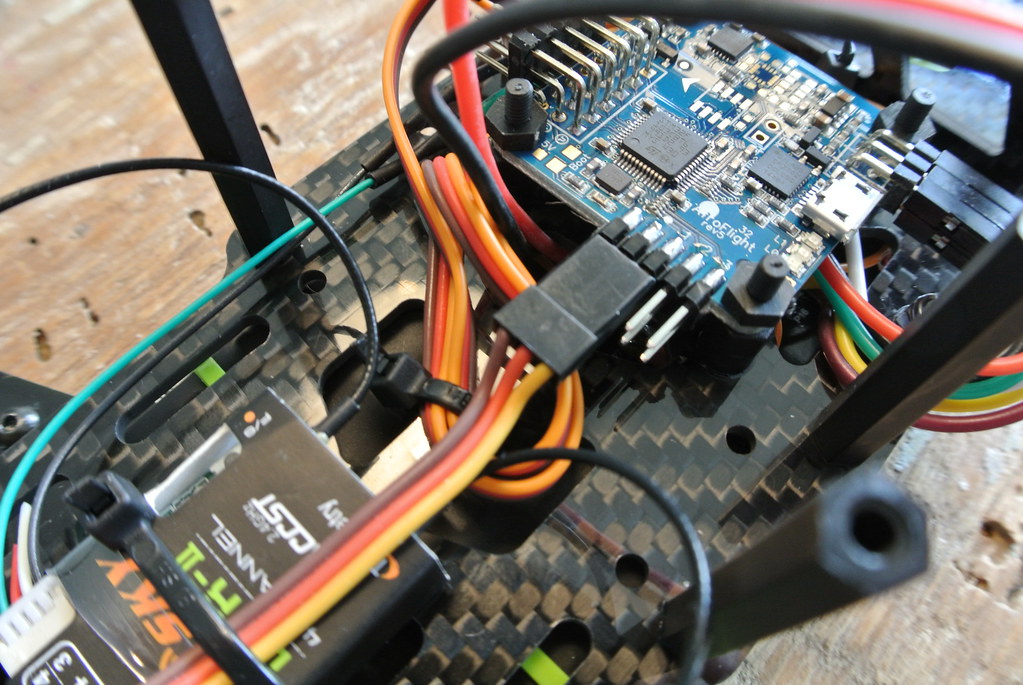
Ik had niet echt een idee van de frame afmetingen tegenover het Naze32 bordje. Daarom had ik meteen de 90 graden headers besteld. Achteraf had ik hier iets beter in moeten duiken. Door de 90 graden headers op de telemetrie uitgangen, kun je de USB stekker er niet fatsoenlijk meer in krijgen. Wanneer je de configurator van Cleanflight wilt aansluiten, moet je elke keer de telemetrie stekkers op de Naze32 eruit trekken. Ondertussen heb ik dit opgelost door de 90 graden headers met een tangetje recht te zetten en op de juiste lengte af te knippen.
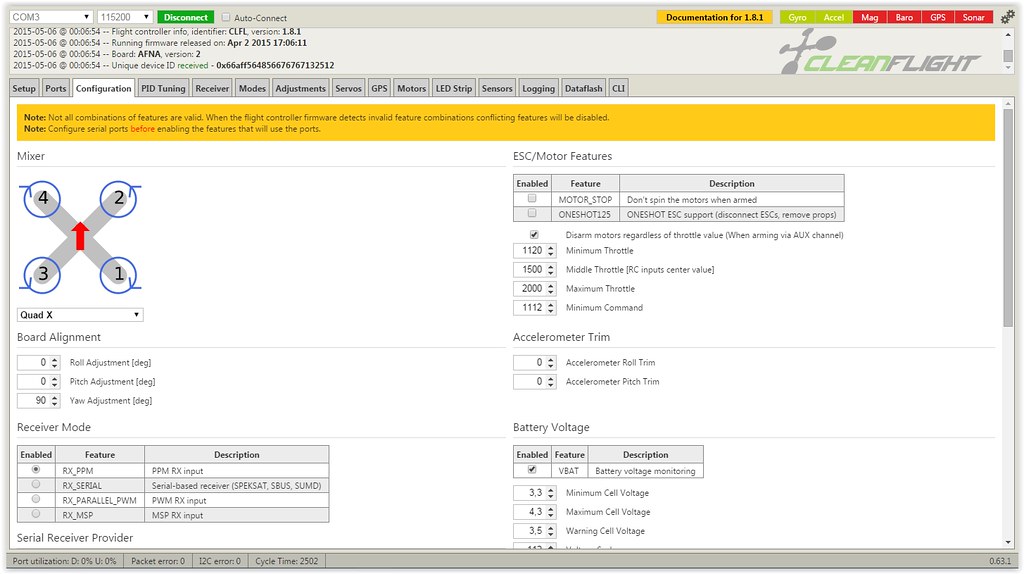
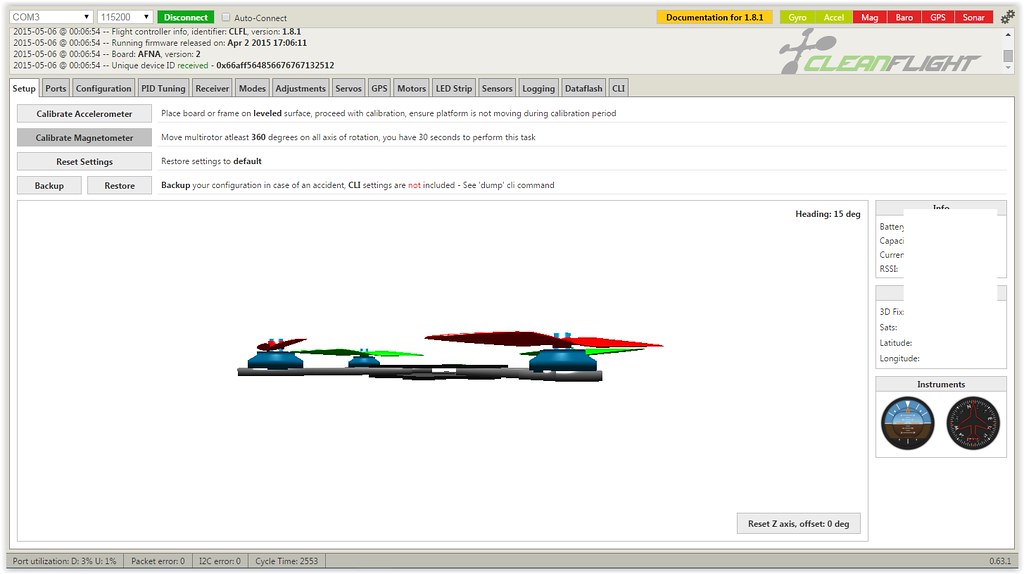
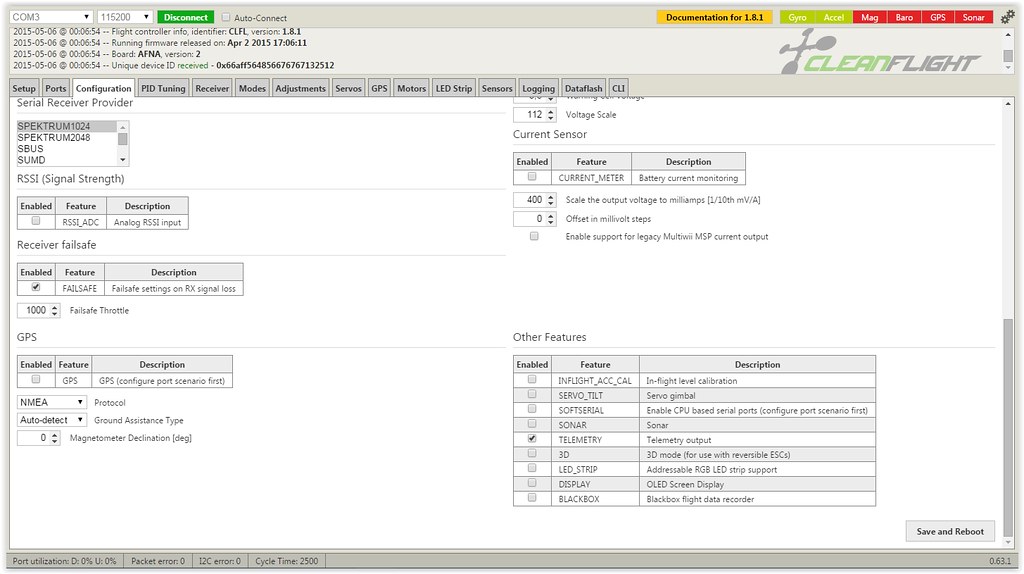
Op de Naze32 staat een pijl in de richting van de voorkant. Deze heb ik een kwartslag naar rechts gedraaid. Anders kun je niet fatsoenlijk bij de USB aansluiting. Vergeet niet om dit in Cleanflight aan te geven, anders herkent de Naze32 de voorkant niet. Te vinden onder ‘Board Alignment – Yaw Adjustment’:
Daarnaast passen sommige 90 graden headers niet vanwege de ‘firewall’ waar je de Lipo tegenaan schuift.
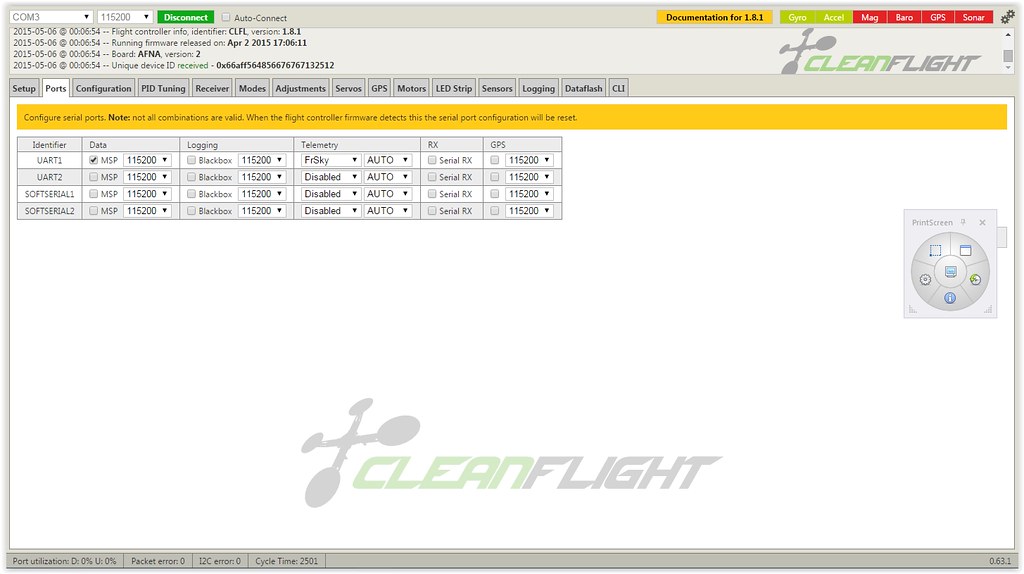
Er zijn meerdere soorten firmware te krijgen om op de Naze32 te flashen. Uiteindelijk ben ik vanwege de goede reacties voor Cleanflight gegaan. Er zijn ontzettend veel opties in te stellen. Het kost je dus ook wat tijd om er achter te komen hoe alles werkt. Hier op Modelbouwforum vind je een topic waar je alle vragen over Cleanflight kwijt kunt, lees er eens doorheen. Anders kun je altijd bij de officiële site van Cleanflight terecht. Hier vind je de meest recente versie en hier de driver die je ook nodig hebt. De Cleanflight Configurator draait alleen op Google Chrome en is dus ook te vinden via de App Store . Op één of andere manier heb ik het nooit draaiend gekregen op mijn Macbook. Ik draai de Configurator nu in Windows via Parallels Desktop.
Hieronder wat video’s met een aardige uitleg over de Naze32:
Motoren, ESC’s en propellers
Zoals eerder gemeld ben ik gegaan voor de setup uit het filmpje van MetallDanny. Als hij die toeren uit kan halen, moet het wel goed zijn. Dat was mijn insteek. Totaal geen spijt van gehad. Het gaat als een trein! Ik dacht nog dat de 20A ESC’s misschien op het randje waren, aangezien de motoren ook 20A aan vermogen vragen, maar na wat speurwerk bleek het geen probleem te zijn. De motoren en ESC’s worden ook niet warm. Uiteindelijk trekken de Cobra’s maximaal 24A weg met de HQ6045’s op 4S conform de tabellen , maar aangezien de ZTW ESC’s een 35A burst hebben en goed gekoeld worden tijdens de vlucht, lijkt het allemaal goed te gaan.
Tiger motoren worden ook veel gebruikt. Blackout zelf adviseert zowel de Cobra als Tiger motoren. Bij Tiger moet je het type MN 2208 2000kv hebben.
Mocht één van de motoren de verkeerde kant op draaien dan dien je twee van de drie draden die op de ESC’s aangesloten zitten te verwisselen. Het maakt niet uit welke. In de Cleanflight Configurator onder ‘ Configuration’ zie je een voorbeeld van de draairichting. De meeste bouwers solderen de draden direct aan de ESC. Je kunt de draairichting vooraf testen, maar ik heb niet uitgezocht hoe. Ik heb uiteindelijk 3mm bullet stekkers tussen motor en ESC gesoldeerd. Ook makkelijk wanneer je een motor kapot vliegt. Dan hoeft niet het hele frame uit elkaar om bij de ESC te kunnen. Wanneer een ESC het begeeft, wordt het wat lastiger. Dan moet je weer bullet connectors aan de ESC solderen. Maar aangezien het frame dan toch uit elkaar moet, boeit dat ook niet meer.
Er worden veel verschillende soorten ESC’s gebruikt. De ZTW’s werden in het filmpje van MetallDanny gebruikt en waren in Nederland te krijgen. Voor mij dus geen verdere zoektocht meer. Ze zijn geflashed met SimonK firmware. Sinds kort is er een update van de SimonK firmware beschikbaar waarmee je de Oneshot125 functie kunt activeren in Cleanflight. De functie zorgt kort gezegd voor een snellere communicatie tussen Naze en ESC, een nog strakkere reactie dus. Ik heb hem er niet op gezet. Daar heb je speciale tools voor nodig en ik heb mijn ESC’s al netjes ingebouwd.
Blackout adviseert Afro ESC’s, te koop met o.a. SimonK firmware. KISS komt je ook vaak tegen, die worden weer geflashed met BlHeli firmware om Oneshot te kunnen activeren. Het flashen is een verhaal apart, lees je eerst goed in.
De ZTW ESC’s zijn voorzien van een 5Volt BEC (Battery Eliminating Circuit), een ‘schone’ 5V uitgang. Deze kun je gebruiken om de Naze32 te voeden. Koop je ESC’s zonder BEC (OPTO), dan dien je nog een losse BEC toe te voegen aan je setup. Ik heb verhalen gelezen waarbij een losse BEC voor minder storing in je FPV beeld zorgt. Ik heb dit zelf niet getest, heb alleen gevlogen met ESC’s inclusief BEC. De Naze32 wordt gevoed via de ESC headers. Alle ESC’s hebben een plus, min en signaal draad in de servo stekker. Van één ESC hoef je maar al deze draden op de Naze32 aan te sluiten (op de M1 aansluiting) . Van de andere ESC’s alleen de (gele) signaalkabel. De andere plus en min draden heb ik gewoon afgeknipt. Er zijn ESC’s bij, die met deze setup toch voor problemen zorgen. Wanneer je quad zonder reden in eens uit de lucht valt, probeer dan eens om van alle ESC’s ook de min op de Naze32 aan te sluiten. Veel problemen waren daarmee opgelost. Je kunt ze ook gewoon allemaal volledig aansluiten, de Naze32 gebruikt dan toch maar één willekeurige ESC om stroom van af te tappen. Er is nog verschil tussen lineaire en switching BEC’s
, maar hoe dat zit in combinatie met de Naze32 weet ik niet. Misschien dat iemand iets nuttigs hierover kan vertellen in de reacties van dit topic.
De ZTW ESC’s passen perfect tussen de Dirty Plate en de PDB (Power Distribution Board). Sommige ESC’s zijn hoger. Dan dien je extra spacers op de Anti-Vibration Sandwich Mount te zetten.
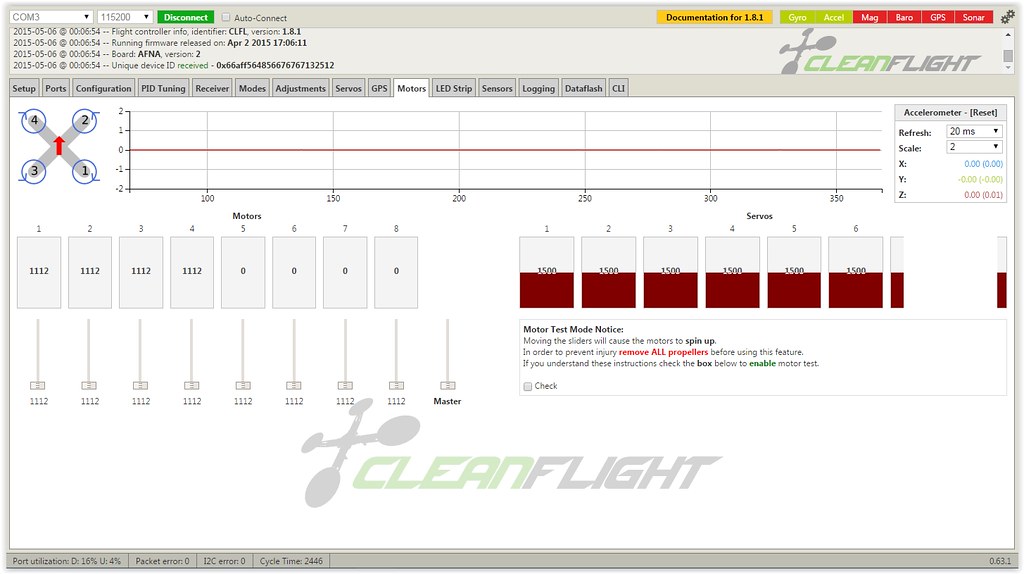
Wanneer je de ESC’s gaat calibreren in Cleanflight, werkt dat het makkelijkst met deze methode:
Als dit gelukt is, gebruik je de Master schuif om te kijken bij welke waarde de motoren allemaal draaien. Bij mij was dit ongeveer 1116. Zet de Minimum Throttle waarde dan net daarboven. In mijn geval 1120. Wanneer je de motoren nu armed, beginnen ze direct ook te draaien. Wil je niet dat ze gaan draaien wanneer je de motoren armed, vink dan Motor_Stop aan. Persoonlijk wil ik kunnen zien en horen dat de motoren gearmed zijn. Doe dit soort calibraties en tests altijd ZONDER propellers.
Met de standaard armen kun je propellers tot 6 inch gebruiken. De HQ6045’s worden het meest gebruikt op de B330. Je kunt ook Gemfan’s gebruiken, deze zijn wat minder stug dan de HQ’s en breken dan ook net wat sneller. Niet dat het wat uit maakt, de HQ’s zijn glasvezel versterkt en breken toch als luciferhoutjes met de power van de Cobra motoren.
FPV setup
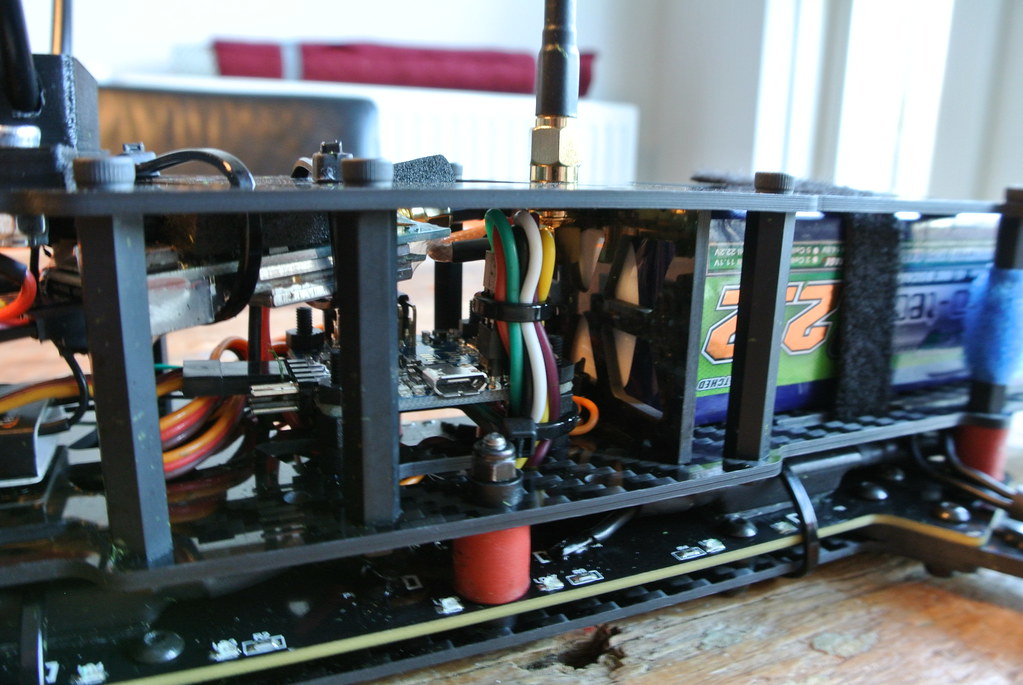
Ik heb gekozen voor een vrij standaard setup welke ook weer veel gebruikt wordt door FPV racers. De videozender is de ImmersionRC 5.8GHz 600mW. Een VTX waarbij je je niet druk hoeft te maken over de voeding aangezien je tot 6S Lipo’s direct aan kunt sluiten. Ik heb hem dan ook rechtstreeks op de PDB aangesloten. Hij heeft ook een schone 5Volt uitgang om de FPV camera mee te voeden. De VTX is beperkt in het aantal kanalen tegenover bijvoorbeeld een 32 kanaals Boscam, maar ik was toch al van plan om een Fatshark bril aan te schaffen dus dan zijn de 8 kanalen van de ImmersionRC ruim voldoende. Een Fatshark bril en ImmersionRC VTX werken met dezelfde kanalen. Ik heb er voor gezorgd dat de kanaal-schakelaars nog steeds bereikbaar zijn door de bovenste frameplaat heen.
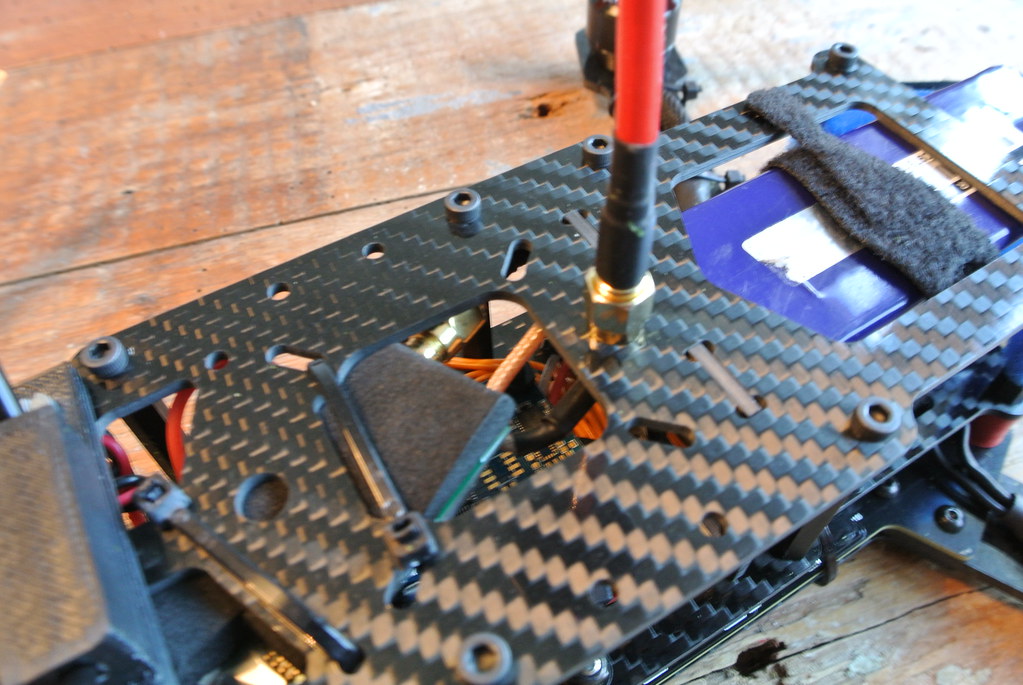
Om de setup compleet te maken heb ik gekozen voor de Fatshark SpiroNET antennes. Zijn van goede kwaliteit, dus waarom verder zoeken naar een iets goedkopere oplossing? Ik kreeg de tip van Hans (Heyudude) om de antenne niet rechtstreeks op de VTX te schroeven aangezien de contactpunten op de VTX tijdens een crash snel kunnen breken. Dat is niet makkelijk te solderen. Daarom heb ik nu een pigtail tussen VTX en SpiroNET antenne geplaatst. Een Pigtail is niet meer dan een SMA verlengkabel tussen VTX en antenne. Een tweede waardevolle tip was om niet alle elektronica rechtstreeks tegen het frame te klemmen, maar er wat schuim tussen te doen. Hiervoor kun je bijvoorbeeld het schuim uit het doosje van de motoren gebruiken.
De camera die ik gekozen heb, is ook weer een veel gebruikt onderdeel in het FPV wereldje, de Sony 600TVL. Met de 2.8mm lens heb je prima beeld in je bril. Door de WDR functie heb je bijna geen last van tegenlicht. Hieronder een video met instellingen die ik als basis heb genomen:
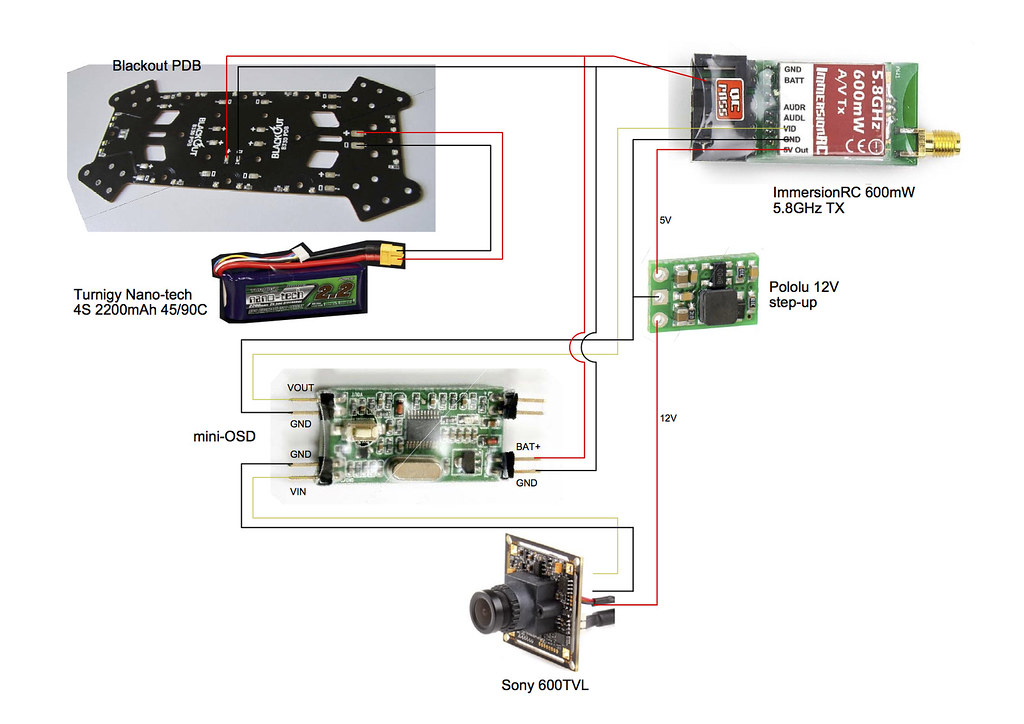
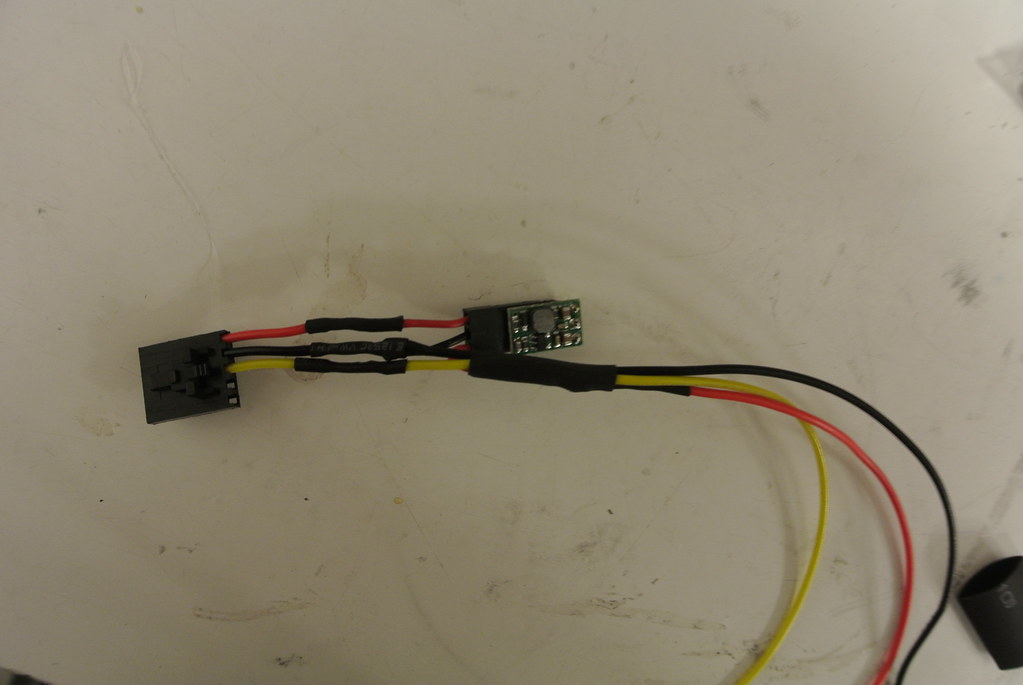
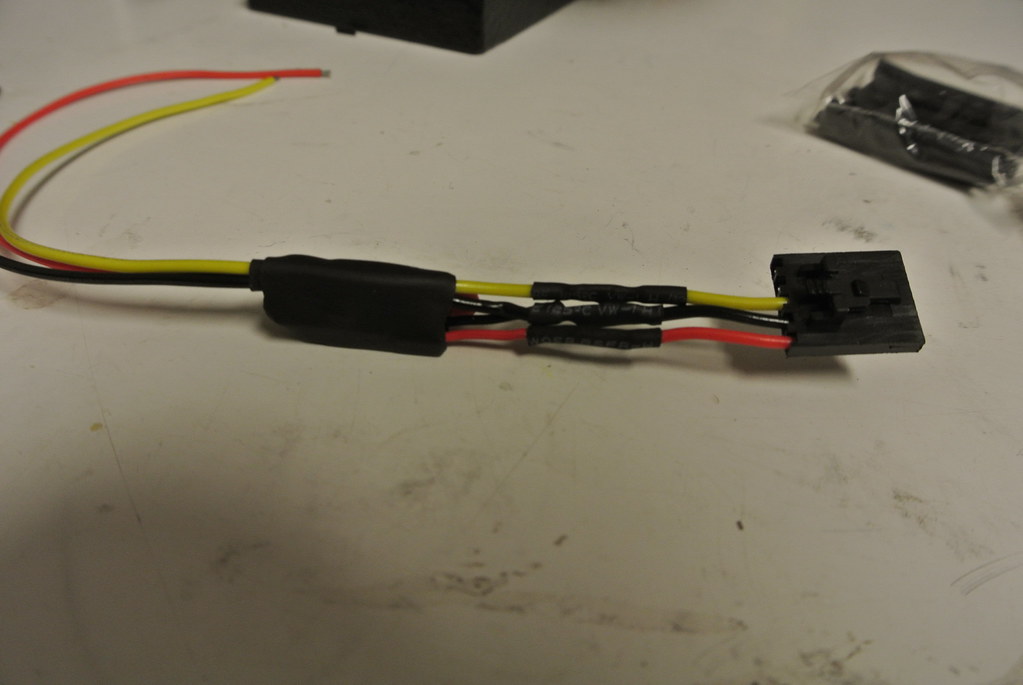
De camera heeft 12Volt nodig. De VTX levert maar 5V. Dit is op te lossen door er een 12V step-up converter tussen te zetten. Een simpele en goedkope oplossing. Hieronder een schema van de setup.
De FPV camera dient onder een hoek te staan aangezien de Blackout altijd onder een hoek vliegt wanneer je voorwaarts vliegt. De printplaat van de camera is net te groot voor de Blackout ‘CCD camera plate’. Je dient de buitenste rand van de printplaat te verwijderen. Gaat heel makkelijk. De bovenste M2 bouten zijn te kort voor een fatsoenlijke hoek, daarom heb ik ze vervangen voor langere M3 bouten. Dan dien je de bovenste gaten iets uit te boren. De bijgeleverde anti vibratie rubbers heb ik in tweeën gesneden en alleen aan de onderzijde gebruikt. Voor de twee M3 bouten aan de bovenzijde heb ik grotere anti vibratie rubbers gekocht.
De printplaat van de camera is vrij gevoelig voor vocht. Na alles getest te hebben, heb ik met PlastiDip een laag rubber over de printplaat gespoten. Werkt goed, je dient wel ongeveer 4 lagen aan te brengen en zorg dat je het in een doos doet of zo, de spuitkop is niet precies. Plak ook alle pluggen goed af.
Het is handig om het voltage van de lipo direct in je FPV bril te kunnen zien. De buzzer hoor je namelijk alleen wanneer de B330 dichtbij is. Ik ben voor een simpele miniOSD gegaan. Meer dan tijd en voltage zie je niet, maar dat is meer dan genoeg voor het FPV racen.
Lipo’s
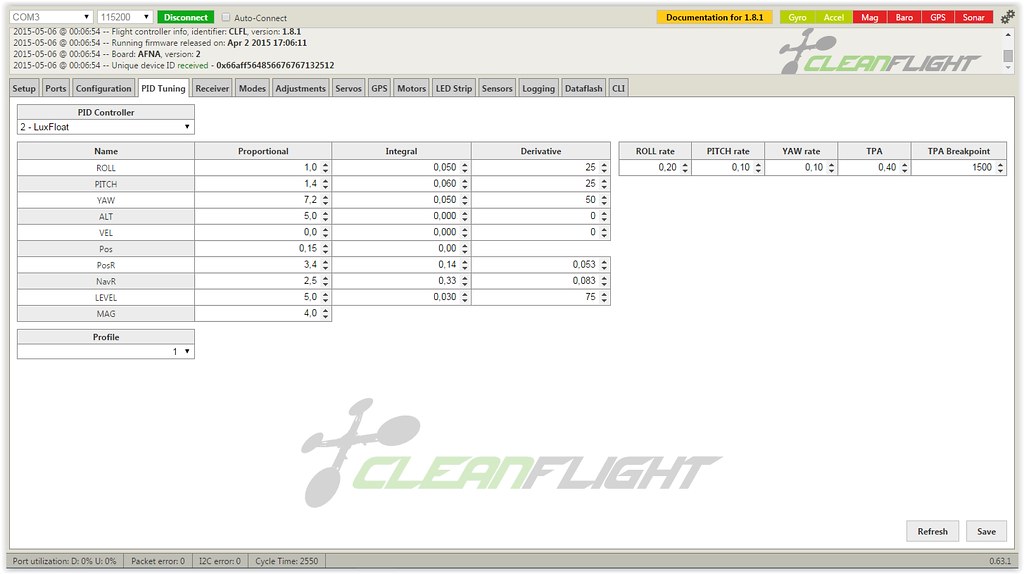
Ook hier heb ik de makkelijke weg gekozen en ben ik voor een lipo gegaan die vaker op de B330 gebruikt wordt. Het gaat hier om de Turnigy Nanotech 4S 2200mAh 45/90C. Achteraf bleek het ook de juiste Lipo te zijn voor deze setup. De balans is perfect. Vliegtijden variëren van 4 minuten tot max 10 minuten. Als je als een dolle gaat vliegen is 4 minuten waar je op moet rekenen. Ben je wat LOS (Line Of Sight) aan het hoveren met wat punch outs om bijvoorbeeld de PID’s te tunen, dan is 10 minuten haalbaar.
Wil je wat meer weten over de keuze van een lipo, dan zijn dit goede items om even te lezen.
http://www.modelbouwforum.nl/forums/threads/wat-is-een-lipo-en-hoe-gebruik-je-die.123782/
http://www.fpv-racing.nl/fpv-racer-...ste-accu-bij-je-setup-(-under-construction-)/
http://www.pkracing.nl/lipoaccutechniek-techmenu.jsp
Hieronder ook nog een handige video met wat uitleg over de keuze van een Lipo:
Er zijn ook piloten die de B330 gebruiken om mee te cruisen. Dan zou je eventueel voor de 3300mAh Nanotech accu kunnen gaan. Ik heb goeie verhalen gelezen over deze accu in combinatie met de B330.
Let wel op de hoogte van het Lipo compartiment bij het kopen van een Lipo. Je hebt maar 35mm aan hoogte. In de praktijk past een Lipo van 33mm maar net.
Afstandsbediening en ontvanger
Ik zocht een veelzijdige afstandsbediening voor een redelijke prijs. Ik kwam al snel bij de Taranis FrSky X9D Plus uit. Voorzien van Open-TX open source software welke regelmatig geüpdatet wordt.
In combinatie met de D4R-II ontvanger heb je een prima setup welke je ook nog eens voorziet van telemetry functies. Cel voltage van de Lipo is bijvoorbeeld direct af te lezen op de Taranis.
Hieronder een video die me op weg heeft geholpen met het instellen van de Taranis:
Zorg dat je de sticks van de Taranis kalibreert voordat je de eerste keer gaat vliegen. Dat doe je door de ‘menu’ knop wat langer ingedrukt te houden en dan met de ‘page’ knop naar de ‘calibration’ pagina te bladeren.
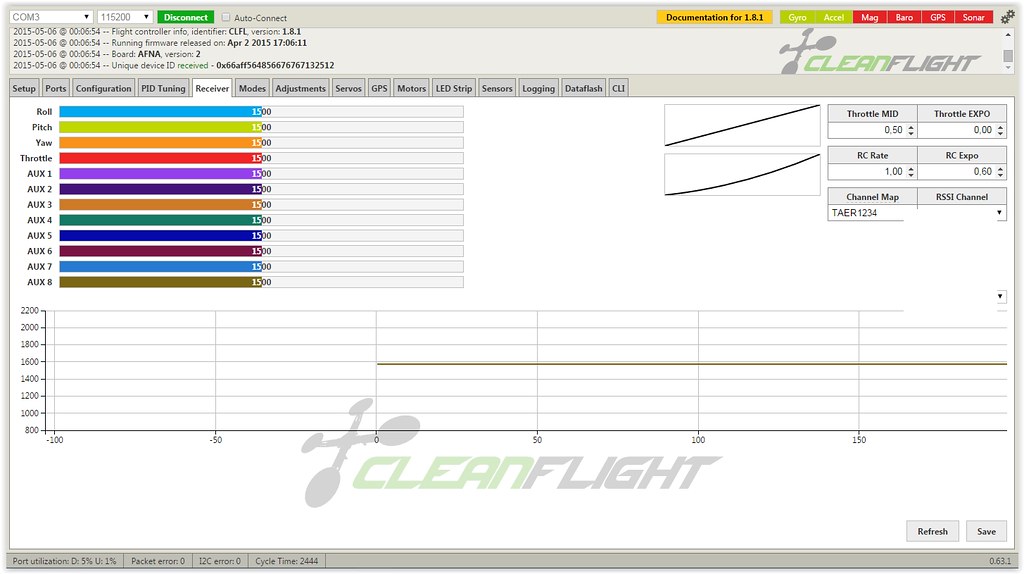
Wanneer na calibratie van de sticks de waarde niet op ca. 1500 staat in Cleanflight bij het tabblad ‘Receiver’, dan kun je last krijgen van drift. Dit kun je controleren door de Lipo aan te sluiten als Cleanflight is opgestart. Je ziet dan de exacte mid-stick input in het tabblad ‘Receiver’. Mocht je drift op de Yaw input hebben, dan zou je in de CLI tab de Yaw deadband kunnen verhogen met het commando ‘set yaw_deadband = 4’. Hier had ik zelf dus last van. Yaw gaf ca. 1503 i.p.v. 1500.
Ook op RC Groups een topic met veel info.
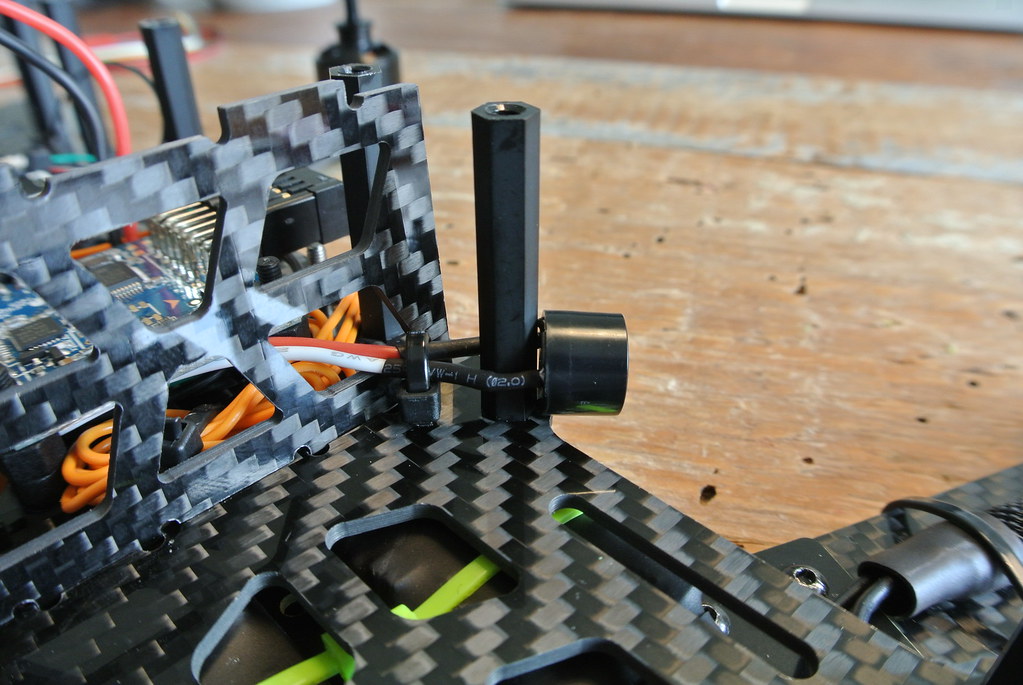
De twee antenne’s van de D4R-II dienen onder een hoek van 90 graden gezet te worden. Ik kon hier geen passende module voor vinden. Uiteindelijk heb ik zelf wat ontworpen in 3D om uit te laten printen via 3D Hubs. Met het gratis browser programme TinkerCAD kun je vrij simpel een ontwerp maken en als STL bestand exporteren. Hier een link naar de antenne mount die ik zelf voor de B330 ontworpen heb. Het is een verbeterde versie dan degene die je op de foto’s ziet. De antenne’s staan nu ook in een hoek van ca. 22 graden t.o.v. het frame. Ik heb RC rietjes van 3mm gebruikt, besteld bij TopRC. De sparingen voor de antenne’s in het 3D ontwerp zijn 4mm omdat tijdens het printen de ABS kunststof wat uit kan zakken.
Uiteindelijk heb ik ook voor de stand van de actie camera (SJ4000) een 3D model ontworpen. Deze zie je niet terug in de afbeeldingen.
Afbeeldingen volgen in onderstaande posts aangezien je niet meer dan 20 afbeeldingen per post kan plaatsen..
Ik had al wat ervaring met RTF multirotors, maar ik zocht toch meer uitdaging.
Toen kwam ik filmpjes van MetallDanny tegen. Tja, dan ben je verkocht!
Mede door dit filmpje en na vele uren lezen op verschillende fora kwam ik bij de frames van Blackout uit. Zeer sterke frames die zich al aardig bewezen hebben. Het kost wat, maar dan heb je ook wat! Ik ben voor de B330 gegaan en niet voor de Mini-H door de mogelijkheid om er een gimbal aan te kunnen hangen. Aangezien de B330 aardig wat geld heeft gekost ondertussen, wordt de gimbal nog een tijdje uitgesteld..
Ik heb totaal, maar echt totaal geen kaas gegeten van het hele zelfbouw en FPV gebeuren. Mijn Macbook heeft dus aardig wat internet overuren gemaakt de laatste tijd. Hier op het Modelbouwforum ben ik bij het bouwverslag van BorisB terecht gekomen. Dat heeft me flink op weg geholpen.
Voor de elektronica heb ik onderdelen uit het filmpje van MetallDanny als uitgangspunt genomen. Als alle onderdelen zo’n vlucht overleven, dan moet het wel goed zijn dacht ik zo. Tot nu toe geen spijt van gehad. Alle elektronica werkt nog perfect en ik heb er al aardig wat uurtjes op zitten. Buiten het hele frame met alle elektronica, had ik ook nog geen afstandsbediening en FPV bril. De portemetniks heeft het dus zwaar gehad.
Een vereiste was dat ik grotendeels alle onderdelen in Europa kon halen. Heb teveel negatieve ervaring met shops als Hobbyking. Ik wilde het dus dicht bij huis houden, dat is gelukt!
Het is een ellende lang bouwverslag geworden, maar voor degene die nog nooit een FPV racer gebouwd hebben misschien een mooie verzameling aan info. In ieder geval een samenvatting van alle antwoorden op vragen en problemen waar ik zelf tegenaan liep. Mochten de kenners wat onzin lezen of juist advies hebben, laat maar horen! Uiteindelijk worden we er allemaal weer wijzer van.
Onderdelen:
Ik vond het vooral lastig om shops te vinden voor de juiste onderdelen. Hieronder een lijst van alle onderdelen met een link naar de shops waar onderdelen te koop zijn. Scheelt je weer die extra uren op internet.
- Blackout B330 frame
- Naze32 Acro flight controller + 90gr. headers
- Cobra 2208/20 2000kv motoren
- ZTW A-Series 20A SimonK ESC’s
- HQ6045 glasvezel versterkte propellers
- Turnigy Nano-tech 4S 2200mAh 45/90C Lipo’s
- FrSky Taranis X9D plus zender
- FrSky D4R-II ontvanger
- ImmersionRC 600mW video zender
- ImmersionRC SpiroNET V2 antenne
- Sony 600TVL camera
- Pololu 12 step-up converter
- miniOSD
- servo kabels
- JST pluggen
- XT60 pluggen
- Fatshark Dominator V2
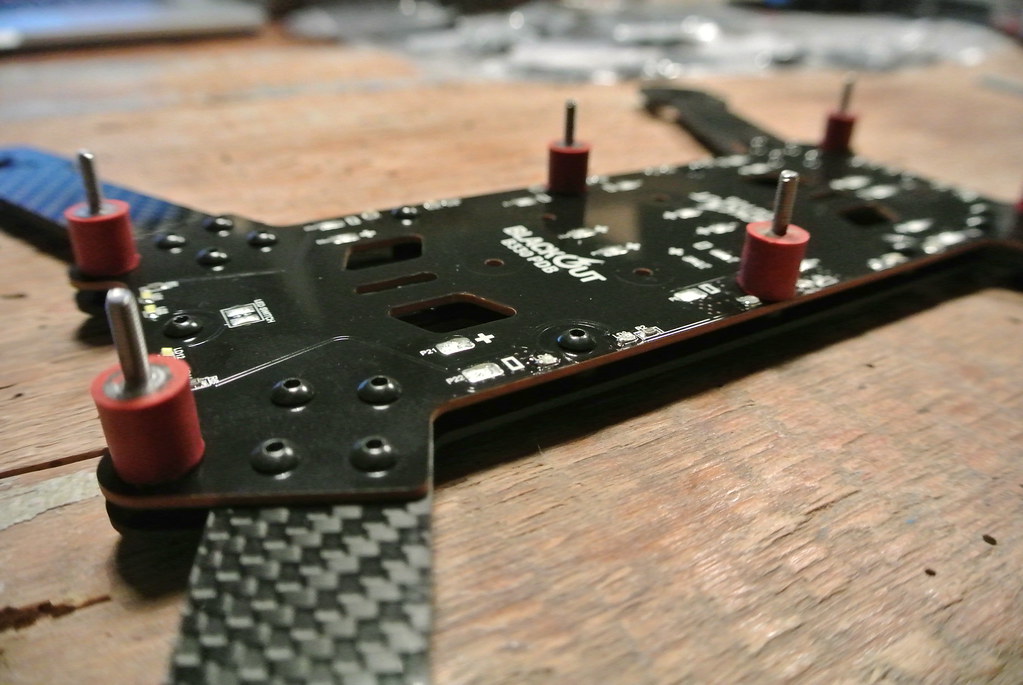
Blackout B330 frame
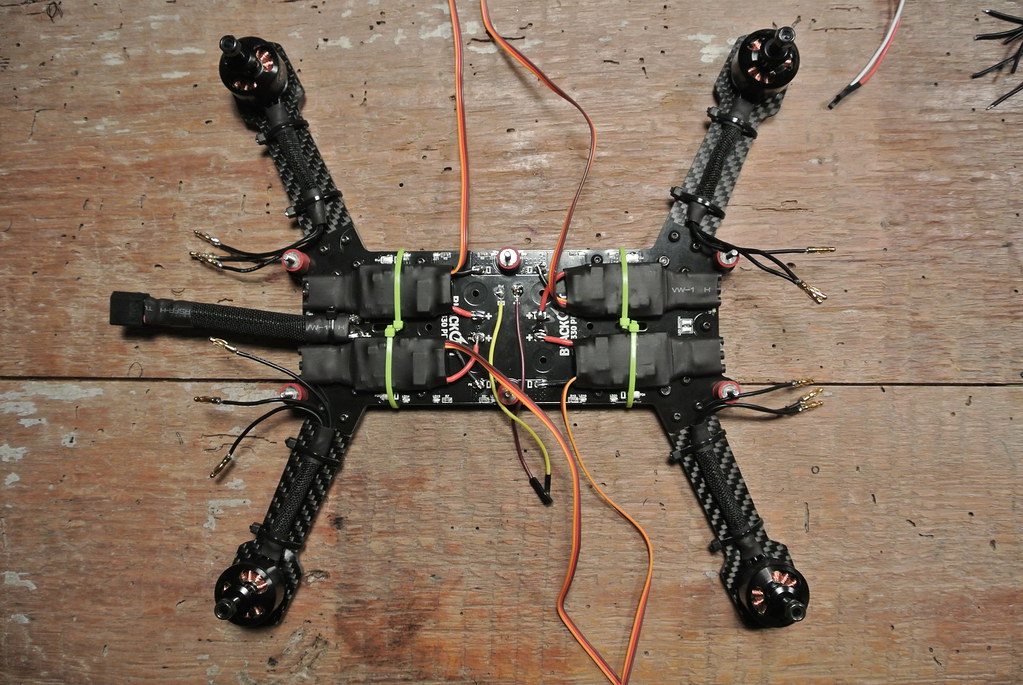
Het frame zelf valt weinig over te vertellen. Het zit gewoon goed in elkaar en is compleet vervaardigd uit Carbon, bijna niet kapot te krijgen. De CCD addon kit is aan te raden, het beschermt je FPV camera tijdens een crash.
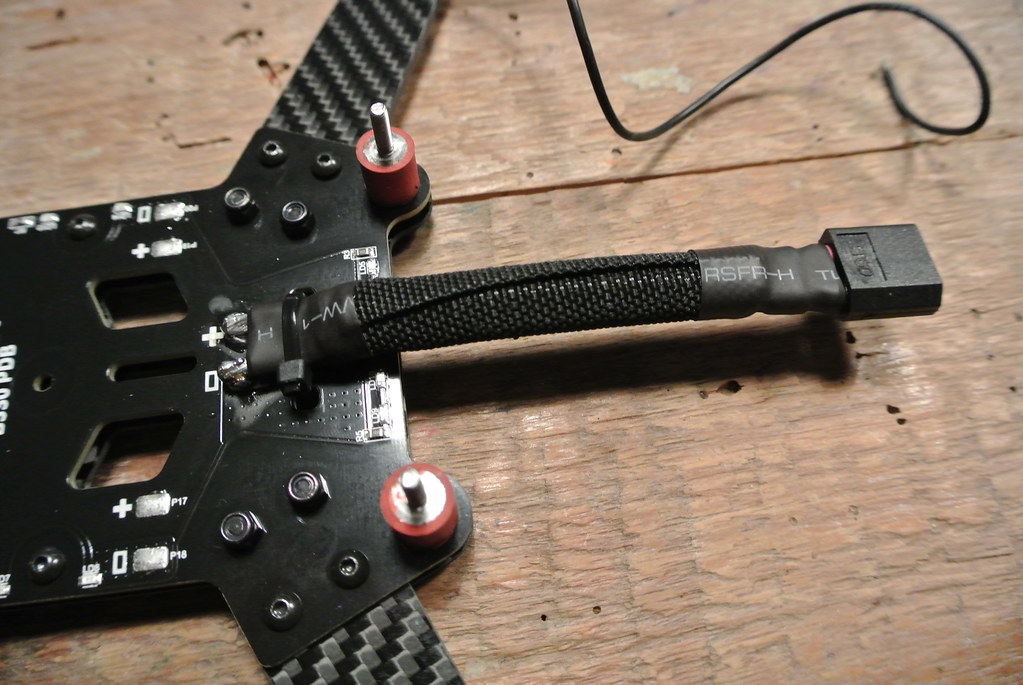
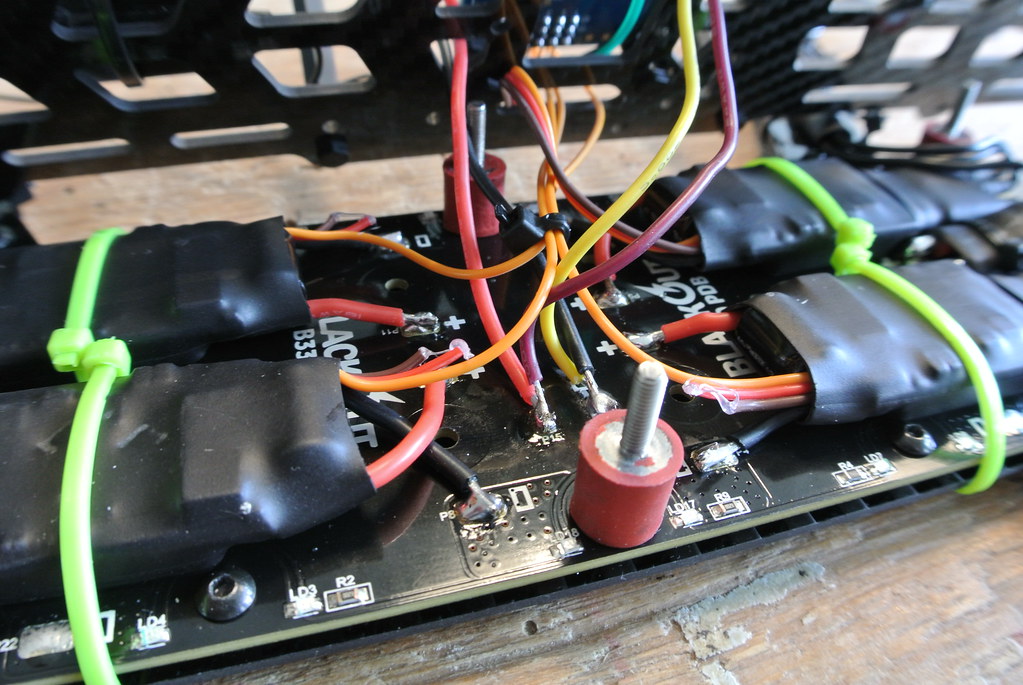
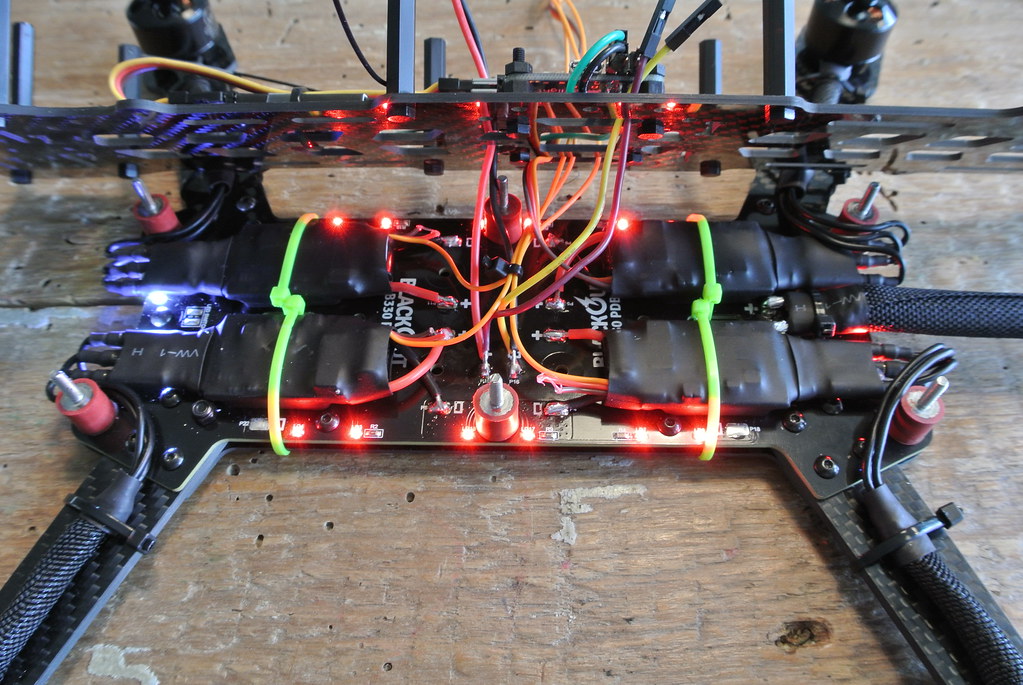
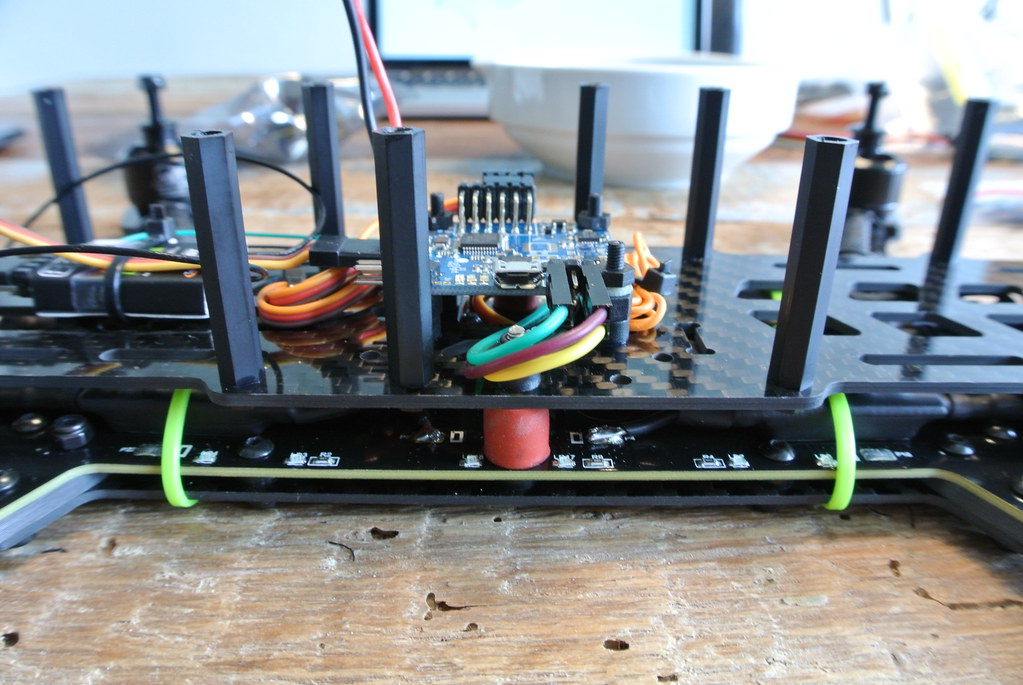
Het Power Distribution Board werkt ideaal voor het aansluiten van de ESC’s. Scheelt je veel kabelwerk in het frame. De ESC’s liggen netjes beschermd tussen de Dirty Plate en PDB. Eén tip.. test de PDB voordat je gaat solderen. Sluit er even snel een Lipo op aan. Ik had twee kapotte LED’s op de PDB. Toch balen als je er pas achter komt wanneer je al aardig wat in elkaar geschroefd hebt. Werd gelukkig netjes en snel vervangen door Multirotorparts voor een nieuwe PDB.
Het enige minpunt van het frame zijn de nylon schroeven. Ik snap niet dat ze zulke slechte kwaliteit schroeven durven te leveren bij zo’n hoogwaardig frame. Ik kreeg van te voren al het advies om ze te vervangen. Na drie crashes bleek het ook nodig te zijn. 90% van de bouten was afgebroken, zelfs de standoff’s waren afgebroken. Uiteindelijk heb ik nu alle nylon bouten en standoff’s vervangen. Je wilt natuurlijk mooi zwarte bouten (cilinderschroef met binnenzeskant M3). Daarvoor kun je terecht bij de meeste modelbouw shops zoals PK-racing en TopRC.
Naze32 Acro
Ik heb nog getwijfeld over de Naze32 Full omdat ik uit het RTF wereldje kom waar je veel functionaliteit vanzelf sprekend al op je multirotor hebt, maar je komt er al snel achter dat de extra functies van de Full overbodig zijn. Bijna alle FPV racers vliegen in de Acro modus, zonder automatische stabilisatie dus! Met het Acro bordje kun je ook nog in Angle en Horizon mode vliegen. De gyro’s houden je Blackout dan stabiel. Een beschrijving tussen Angle en Horizon modus kun je hier vinden.
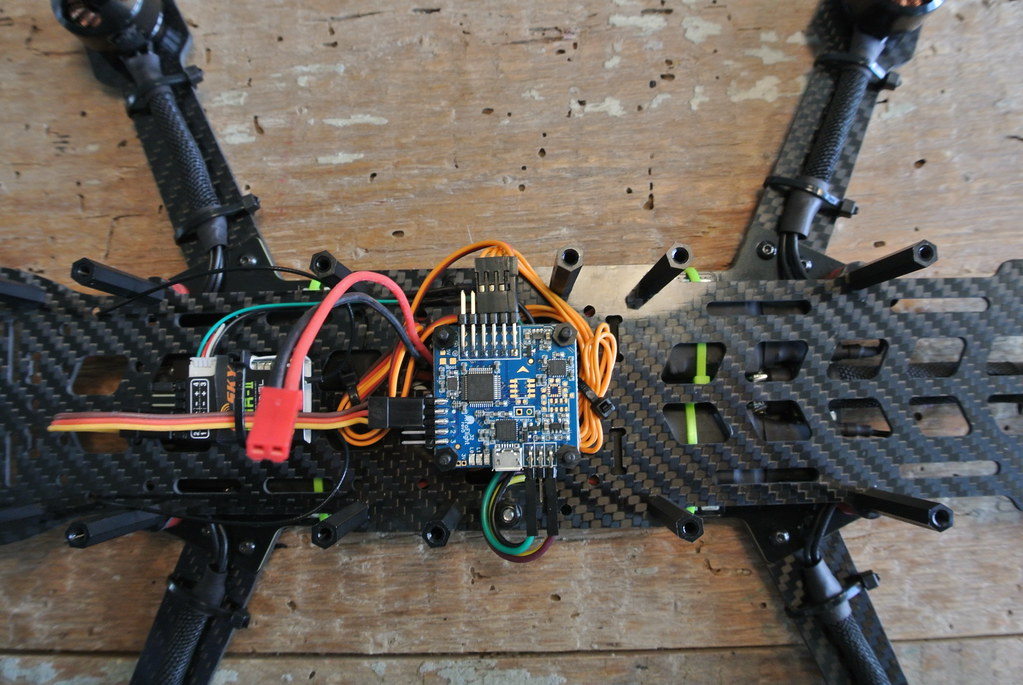
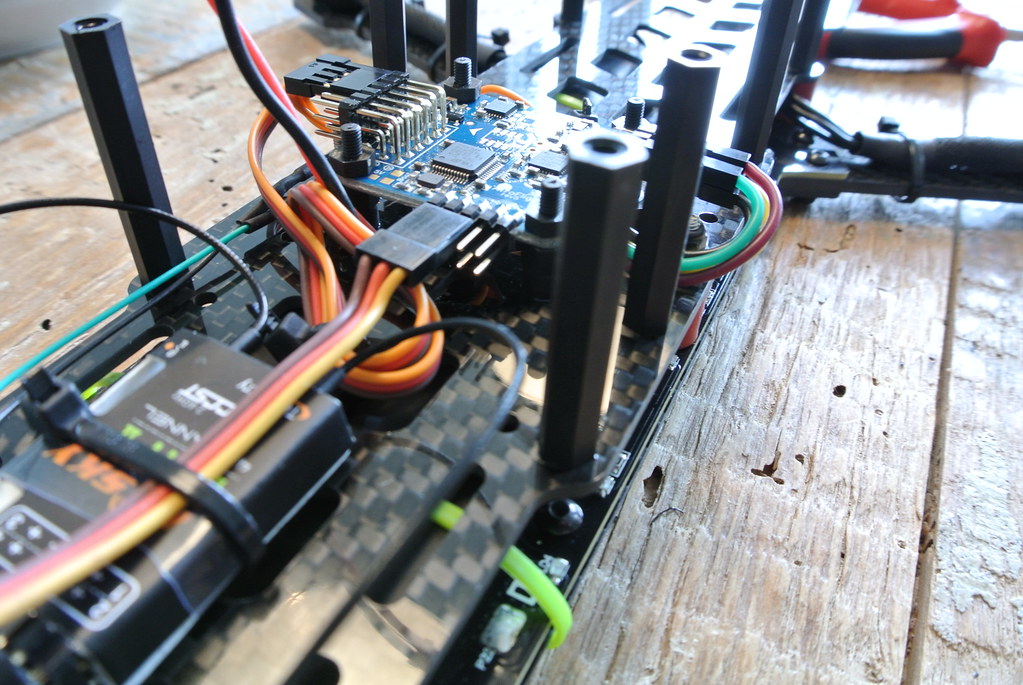
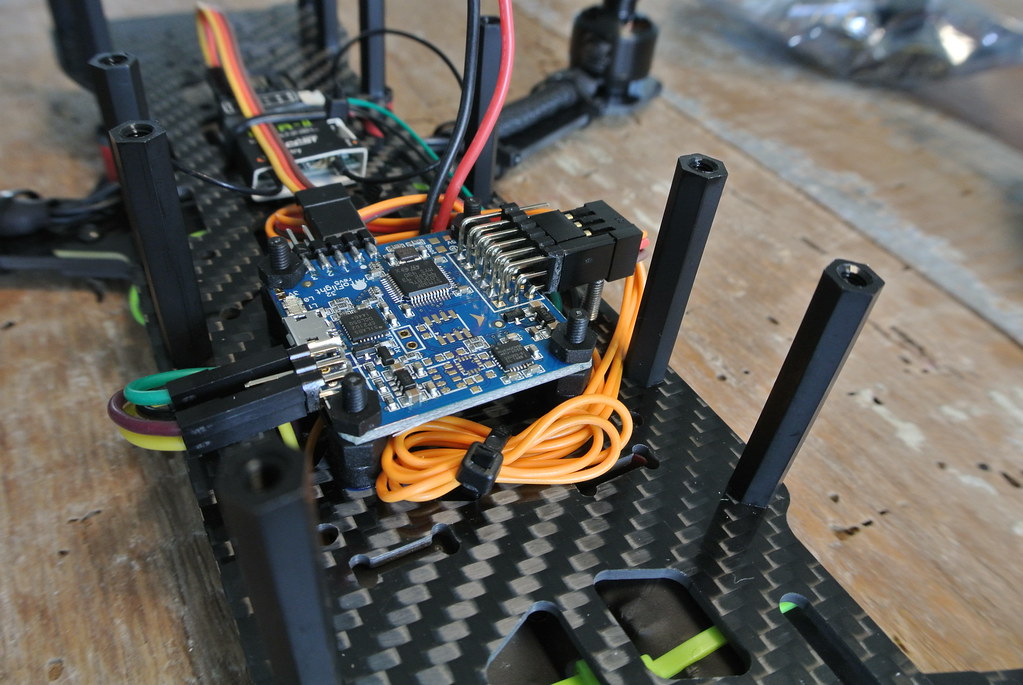
Ik had niet echt een idee van de frame afmetingen tegenover het Naze32 bordje. Daarom had ik meteen de 90 graden headers besteld. Achteraf had ik hier iets beter in moeten duiken. Door de 90 graden headers op de telemetrie uitgangen, kun je de USB stekker er niet fatsoenlijk meer in krijgen. Wanneer je de configurator van Cleanflight wilt aansluiten, moet je elke keer de telemetrie stekkers op de Naze32 eruit trekken. Ondertussen heb ik dit opgelost door de 90 graden headers met een tangetje recht te zetten en op de juiste lengte af te knippen.
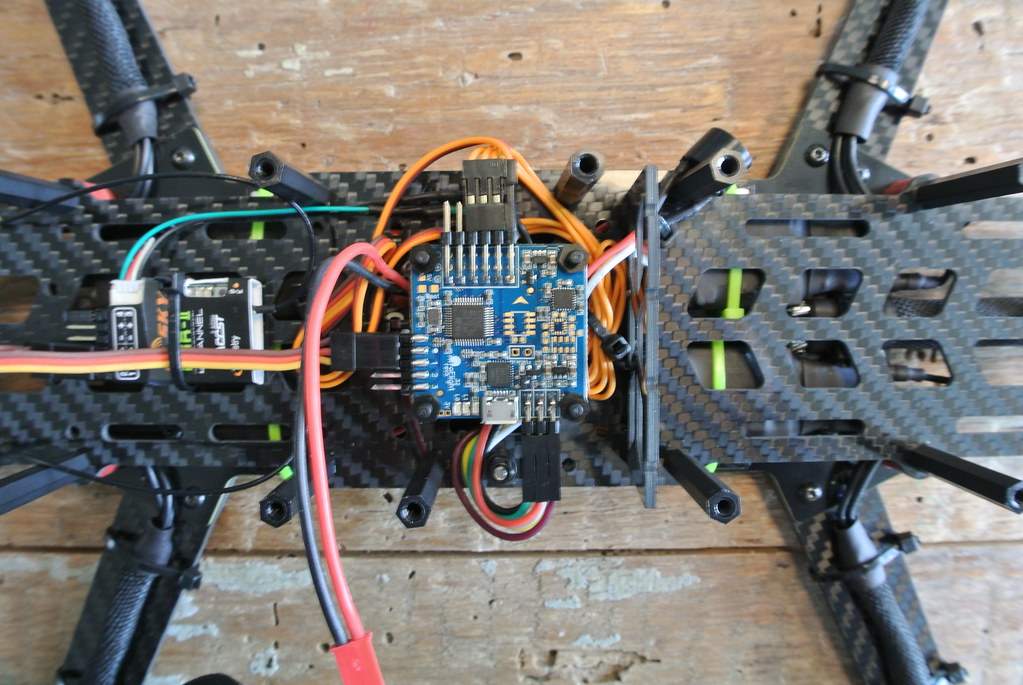
Op de Naze32 staat een pijl in de richting van de voorkant. Deze heb ik een kwartslag naar rechts gedraaid. Anders kun je niet fatsoenlijk bij de USB aansluiting. Vergeet niet om dit in Cleanflight aan te geven, anders herkent de Naze32 de voorkant niet. Te vinden onder ‘Board Alignment – Yaw Adjustment’:
Daarnaast passen sommige 90 graden headers niet vanwege de ‘firewall’ waar je de Lipo tegenaan schuift.
Er zijn meerdere soorten firmware te krijgen om op de Naze32 te flashen. Uiteindelijk ben ik vanwege de goede reacties voor Cleanflight gegaan. Er zijn ontzettend veel opties in te stellen. Het kost je dus ook wat tijd om er achter te komen hoe alles werkt. Hier op Modelbouwforum vind je een topic waar je alle vragen over Cleanflight kwijt kunt, lees er eens doorheen. Anders kun je altijd bij de officiële site van Cleanflight terecht. Hier vind je de meest recente versie en hier de driver die je ook nodig hebt. De Cleanflight Configurator draait alleen op Google Chrome en is dus ook te vinden via de App Store . Op één of andere manier heb ik het nooit draaiend gekregen op mijn Macbook. Ik draai de Configurator nu in Windows via Parallels Desktop.
Hieronder wat video’s met een aardige uitleg over de Naze32:
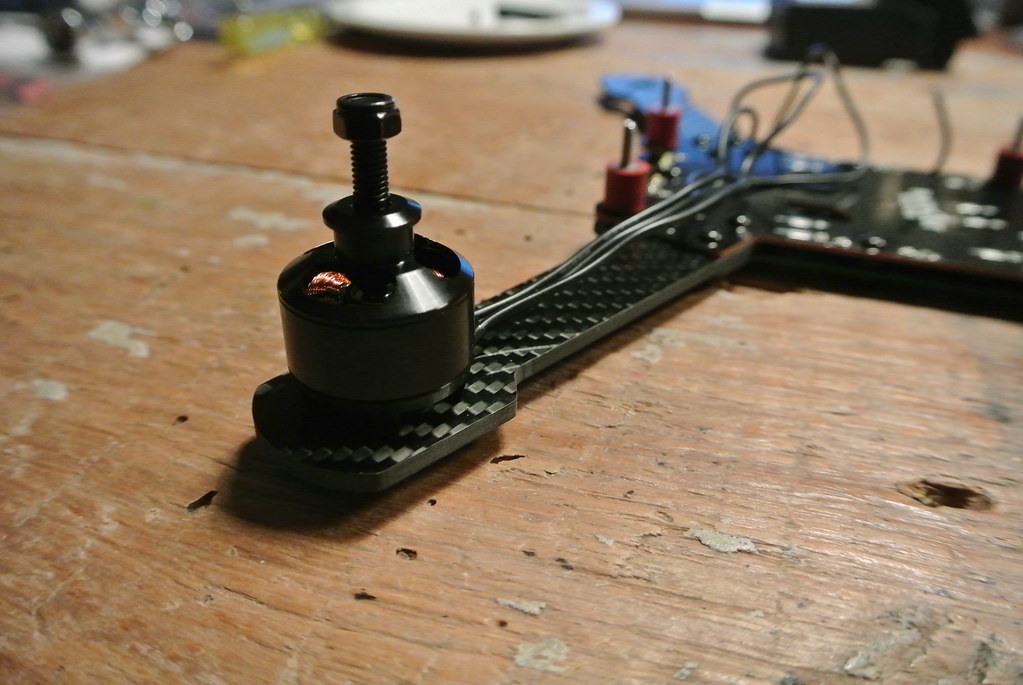
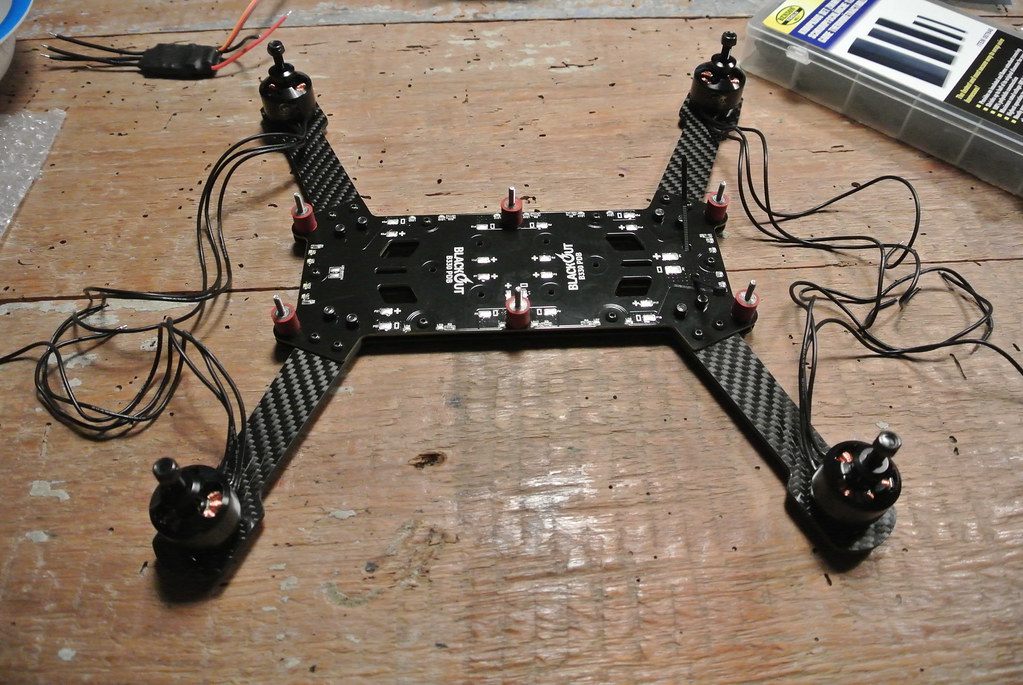
Motoren, ESC’s en propellers
Zoals eerder gemeld ben ik gegaan voor de setup uit het filmpje van MetallDanny. Als hij die toeren uit kan halen, moet het wel goed zijn. Dat was mijn insteek. Totaal geen spijt van gehad. Het gaat als een trein! Ik dacht nog dat de 20A ESC’s misschien op het randje waren, aangezien de motoren ook 20A aan vermogen vragen, maar na wat speurwerk bleek het geen probleem te zijn. De motoren en ESC’s worden ook niet warm. Uiteindelijk trekken de Cobra’s maximaal 24A weg met de HQ6045’s op 4S conform de tabellen , maar aangezien de ZTW ESC’s een 35A burst hebben en goed gekoeld worden tijdens de vlucht, lijkt het allemaal goed te gaan.
Tiger motoren worden ook veel gebruikt. Blackout zelf adviseert zowel de Cobra als Tiger motoren. Bij Tiger moet je het type MN 2208 2000kv hebben.
Mocht één van de motoren de verkeerde kant op draaien dan dien je twee van de drie draden die op de ESC’s aangesloten zitten te verwisselen. Het maakt niet uit welke. In de Cleanflight Configurator onder ‘ Configuration’ zie je een voorbeeld van de draairichting. De meeste bouwers solderen de draden direct aan de ESC. Je kunt de draairichting vooraf testen, maar ik heb niet uitgezocht hoe. Ik heb uiteindelijk 3mm bullet stekkers tussen motor en ESC gesoldeerd. Ook makkelijk wanneer je een motor kapot vliegt. Dan hoeft niet het hele frame uit elkaar om bij de ESC te kunnen. Wanneer een ESC het begeeft, wordt het wat lastiger. Dan moet je weer bullet connectors aan de ESC solderen. Maar aangezien het frame dan toch uit elkaar moet, boeit dat ook niet meer.
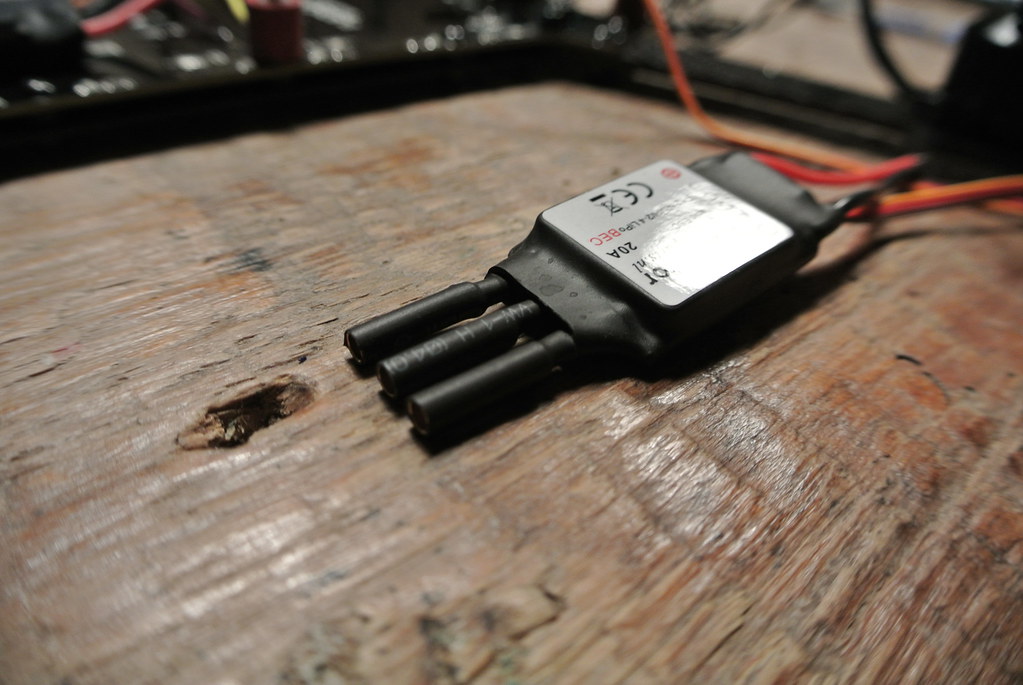
Er worden veel verschillende soorten ESC’s gebruikt. De ZTW’s werden in het filmpje van MetallDanny gebruikt en waren in Nederland te krijgen. Voor mij dus geen verdere zoektocht meer. Ze zijn geflashed met SimonK firmware. Sinds kort is er een update van de SimonK firmware beschikbaar waarmee je de Oneshot125 functie kunt activeren in Cleanflight. De functie zorgt kort gezegd voor een snellere communicatie tussen Naze en ESC, een nog strakkere reactie dus. Ik heb hem er niet op gezet. Daar heb je speciale tools voor nodig en ik heb mijn ESC’s al netjes ingebouwd.
Blackout adviseert Afro ESC’s, te koop met o.a. SimonK firmware. KISS komt je ook vaak tegen, die worden weer geflashed met BlHeli firmware om Oneshot te kunnen activeren. Het flashen is een verhaal apart, lees je eerst goed in.
De ZTW ESC’s zijn voorzien van een 5Volt BEC (Battery Eliminating Circuit), een ‘schone’ 5V uitgang. Deze kun je gebruiken om de Naze32 te voeden. Koop je ESC’s zonder BEC (OPTO), dan dien je nog een losse BEC toe te voegen aan je setup. Ik heb verhalen gelezen waarbij een losse BEC voor minder storing in je FPV beeld zorgt. Ik heb dit zelf niet getest, heb alleen gevlogen met ESC’s inclusief BEC. De Naze32 wordt gevoed via de ESC headers. Alle ESC’s hebben een plus, min en signaal draad in de servo stekker. Van één ESC hoef je maar al deze draden op de Naze32 aan te sluiten (op de M1 aansluiting) . Van de andere ESC’s alleen de (gele) signaalkabel. De andere plus en min draden heb ik gewoon afgeknipt. Er zijn ESC’s bij, die met deze setup toch voor problemen zorgen. Wanneer je quad zonder reden in eens uit de lucht valt, probeer dan eens om van alle ESC’s ook de min op de Naze32 aan te sluiten. Veel problemen waren daarmee opgelost. Je kunt ze ook gewoon allemaal volledig aansluiten, de Naze32 gebruikt dan toch maar één willekeurige ESC om stroom van af te tappen. Er is nog verschil tussen lineaire en switching BEC’s
, maar hoe dat zit in combinatie met de Naze32 weet ik niet. Misschien dat iemand iets nuttigs hierover kan vertellen in de reacties van dit topic.
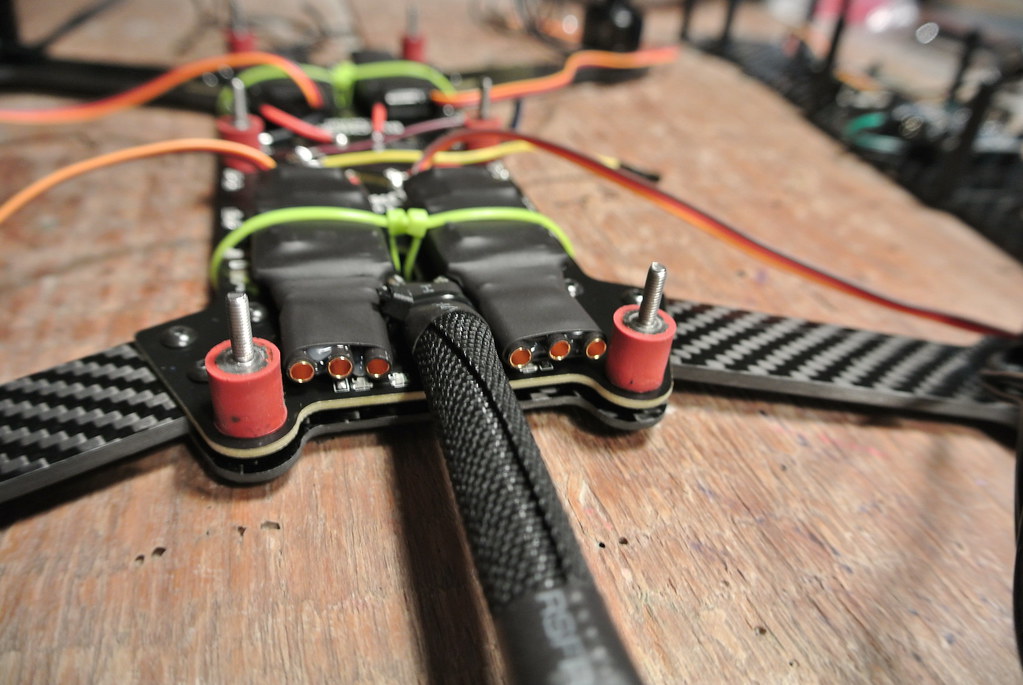
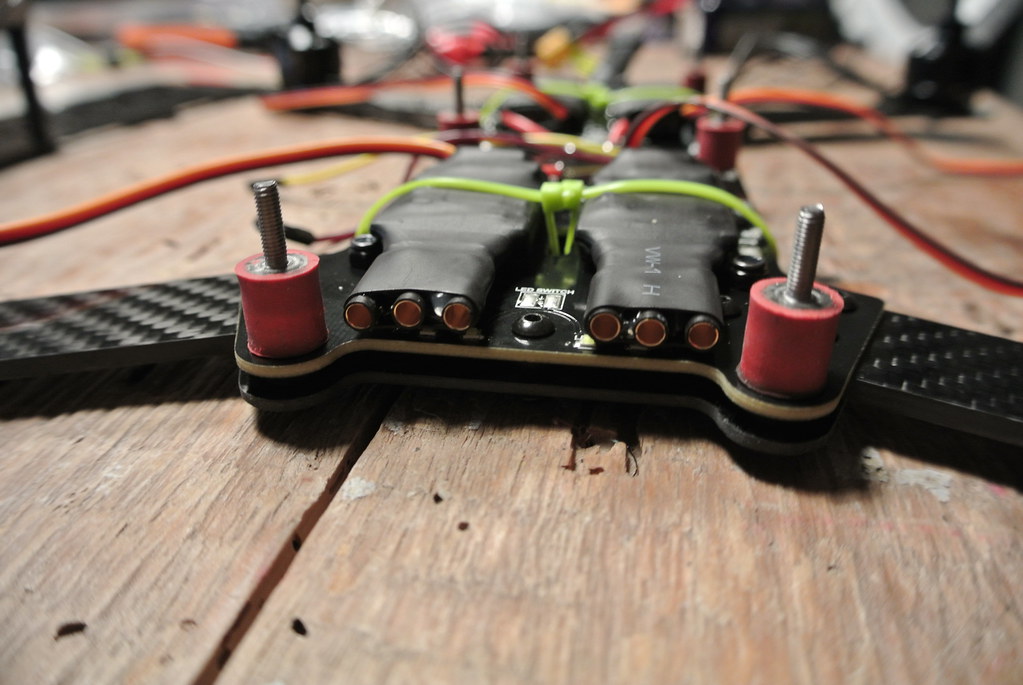
De ZTW ESC’s passen perfect tussen de Dirty Plate en de PDB (Power Distribution Board). Sommige ESC’s zijn hoger. Dan dien je extra spacers op de Anti-Vibration Sandwich Mount te zetten.
Wanneer je de ESC’s gaat calibreren in Cleanflight, werkt dat het makkelijkst met deze methode:
Als dit gelukt is, gebruik je de Master schuif om te kijken bij welke waarde de motoren allemaal draaien. Bij mij was dit ongeveer 1116. Zet de Minimum Throttle waarde dan net daarboven. In mijn geval 1120. Wanneer je de motoren nu armed, beginnen ze direct ook te draaien. Wil je niet dat ze gaan draaien wanneer je de motoren armed, vink dan Motor_Stop aan. Persoonlijk wil ik kunnen zien en horen dat de motoren gearmed zijn. Doe dit soort calibraties en tests altijd ZONDER propellers.
Met de standaard armen kun je propellers tot 6 inch gebruiken. De HQ6045’s worden het meest gebruikt op de B330. Je kunt ook Gemfan’s gebruiken, deze zijn wat minder stug dan de HQ’s en breken dan ook net wat sneller. Niet dat het wat uit maakt, de HQ’s zijn glasvezel versterkt en breken toch als luciferhoutjes met de power van de Cobra motoren.
FPV setup
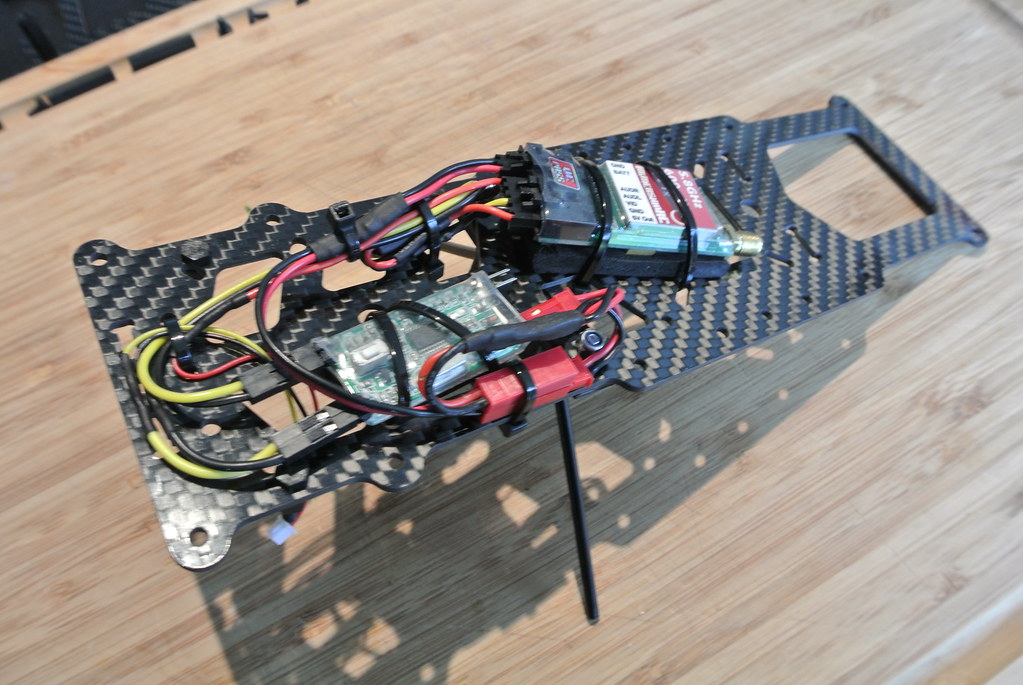
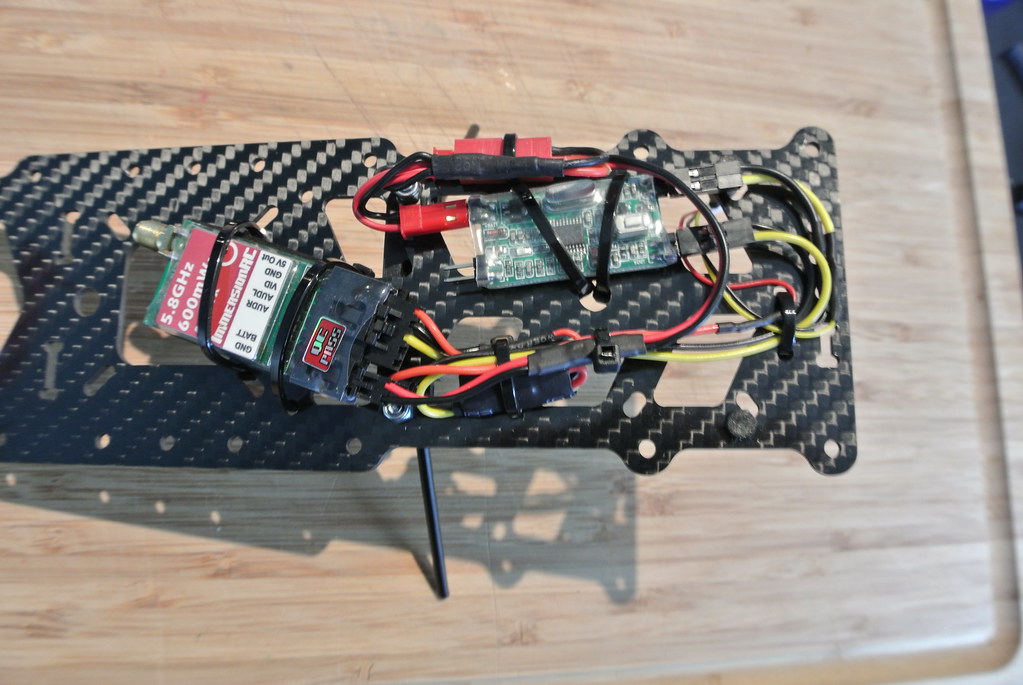
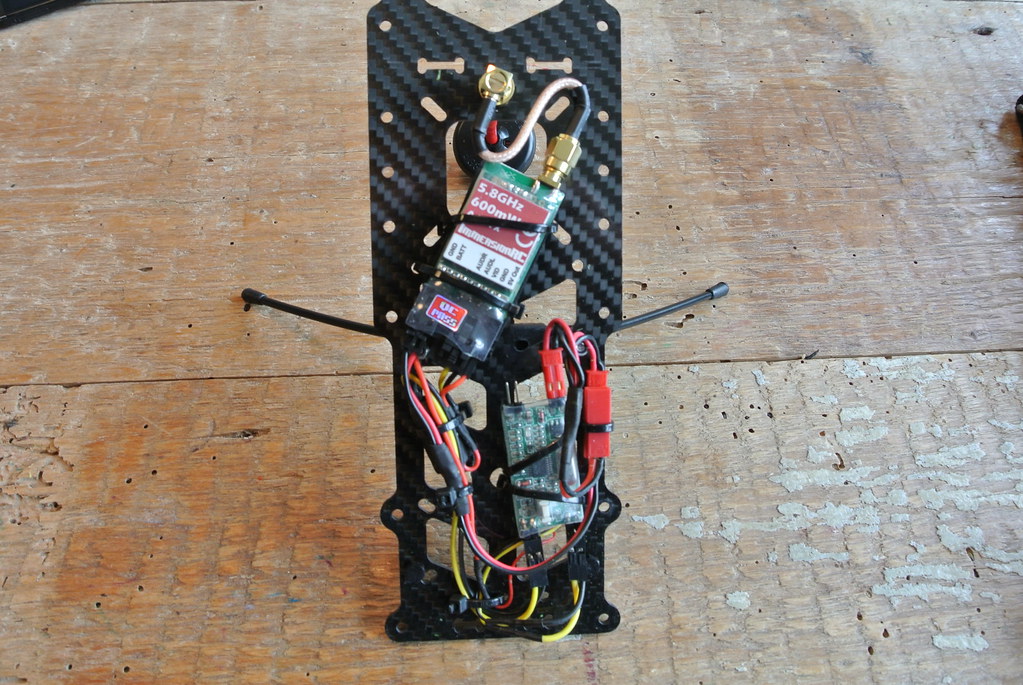
Ik heb gekozen voor een vrij standaard setup welke ook weer veel gebruikt wordt door FPV racers. De videozender is de ImmersionRC 5.8GHz 600mW. Een VTX waarbij je je niet druk hoeft te maken over de voeding aangezien je tot 6S Lipo’s direct aan kunt sluiten. Ik heb hem dan ook rechtstreeks op de PDB aangesloten. Hij heeft ook een schone 5Volt uitgang om de FPV camera mee te voeden. De VTX is beperkt in het aantal kanalen tegenover bijvoorbeeld een 32 kanaals Boscam, maar ik was toch al van plan om een Fatshark bril aan te schaffen dus dan zijn de 8 kanalen van de ImmersionRC ruim voldoende. Een Fatshark bril en ImmersionRC VTX werken met dezelfde kanalen. Ik heb er voor gezorgd dat de kanaal-schakelaars nog steeds bereikbaar zijn door de bovenste frameplaat heen.
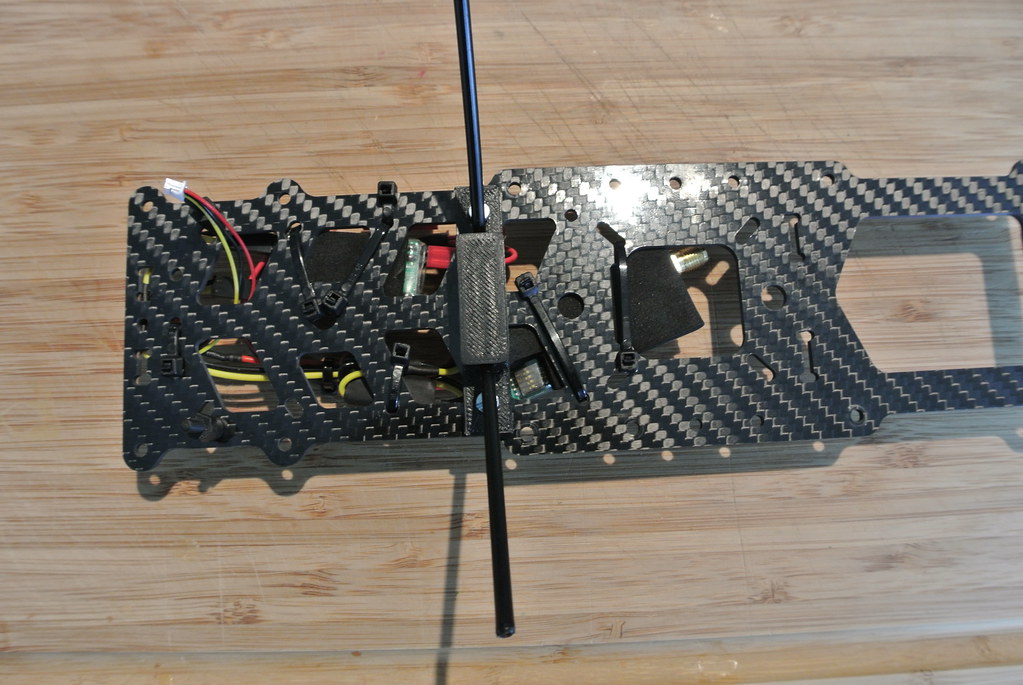
Om de setup compleet te maken heb ik gekozen voor de Fatshark SpiroNET antennes. Zijn van goede kwaliteit, dus waarom verder zoeken naar een iets goedkopere oplossing? Ik kreeg de tip van Hans (Heyudude) om de antenne niet rechtstreeks op de VTX te schroeven aangezien de contactpunten op de VTX tijdens een crash snel kunnen breken. Dat is niet makkelijk te solderen. Daarom heb ik nu een pigtail tussen VTX en SpiroNET antenne geplaatst. Een Pigtail is niet meer dan een SMA verlengkabel tussen VTX en antenne. Een tweede waardevolle tip was om niet alle elektronica rechtstreeks tegen het frame te klemmen, maar er wat schuim tussen te doen. Hiervoor kun je bijvoorbeeld het schuim uit het doosje van de motoren gebruiken.
De camera die ik gekozen heb, is ook weer een veel gebruikt onderdeel in het FPV wereldje, de Sony 600TVL. Met de 2.8mm lens heb je prima beeld in je bril. Door de WDR functie heb je bijna geen last van tegenlicht. Hieronder een video met instellingen die ik als basis heb genomen:
De camera heeft 12Volt nodig. De VTX levert maar 5V. Dit is op te lossen door er een 12V step-up converter tussen te zetten. Een simpele en goedkope oplossing. Hieronder een schema van de setup.
De FPV camera dient onder een hoek te staan aangezien de Blackout altijd onder een hoek vliegt wanneer je voorwaarts vliegt. De printplaat van de camera is net te groot voor de Blackout ‘CCD camera plate’. Je dient de buitenste rand van de printplaat te verwijderen. Gaat heel makkelijk. De bovenste M2 bouten zijn te kort voor een fatsoenlijke hoek, daarom heb ik ze vervangen voor langere M3 bouten. Dan dien je de bovenste gaten iets uit te boren. De bijgeleverde anti vibratie rubbers heb ik in tweeën gesneden en alleen aan de onderzijde gebruikt. Voor de twee M3 bouten aan de bovenzijde heb ik grotere anti vibratie rubbers gekocht.
De printplaat van de camera is vrij gevoelig voor vocht. Na alles getest te hebben, heb ik met PlastiDip een laag rubber over de printplaat gespoten. Werkt goed, je dient wel ongeveer 4 lagen aan te brengen en zorg dat je het in een doos doet of zo, de spuitkop is niet precies. Plak ook alle pluggen goed af.
Het is handig om het voltage van de lipo direct in je FPV bril te kunnen zien. De buzzer hoor je namelijk alleen wanneer de B330 dichtbij is. Ik ben voor een simpele miniOSD gegaan. Meer dan tijd en voltage zie je niet, maar dat is meer dan genoeg voor het FPV racen.
Lipo’s
Ook hier heb ik de makkelijke weg gekozen en ben ik voor een lipo gegaan die vaker op de B330 gebruikt wordt. Het gaat hier om de Turnigy Nanotech 4S 2200mAh 45/90C. Achteraf bleek het ook de juiste Lipo te zijn voor deze setup. De balans is perfect. Vliegtijden variëren van 4 minuten tot max 10 minuten. Als je als een dolle gaat vliegen is 4 minuten waar je op moet rekenen. Ben je wat LOS (Line Of Sight) aan het hoveren met wat punch outs om bijvoorbeeld de PID’s te tunen, dan is 10 minuten haalbaar.
Wil je wat meer weten over de keuze van een lipo, dan zijn dit goede items om even te lezen.
http://www.modelbouwforum.nl/forums/threads/wat-is-een-lipo-en-hoe-gebruik-je-die.123782/
http://www.fpv-racing.nl/fpv-racer-...ste-accu-bij-je-setup-(-under-construction-)/
http://www.pkracing.nl/lipoaccutechniek-techmenu.jsp
Hieronder ook nog een handige video met wat uitleg over de keuze van een Lipo:
Er zijn ook piloten die de B330 gebruiken om mee te cruisen. Dan zou je eventueel voor de 3300mAh Nanotech accu kunnen gaan. Ik heb goeie verhalen gelezen over deze accu in combinatie met de B330.
Let wel op de hoogte van het Lipo compartiment bij het kopen van een Lipo. Je hebt maar 35mm aan hoogte. In de praktijk past een Lipo van 33mm maar net.
Afstandsbediening en ontvanger
Ik zocht een veelzijdige afstandsbediening voor een redelijke prijs. Ik kwam al snel bij de Taranis FrSky X9D Plus uit. Voorzien van Open-TX open source software welke regelmatig geüpdatet wordt.
In combinatie met de D4R-II ontvanger heb je een prima setup welke je ook nog eens voorziet van telemetry functies. Cel voltage van de Lipo is bijvoorbeeld direct af te lezen op de Taranis.
Hieronder een video die me op weg heeft geholpen met het instellen van de Taranis:
Zorg dat je de sticks van de Taranis kalibreert voordat je de eerste keer gaat vliegen. Dat doe je door de ‘menu’ knop wat langer ingedrukt te houden en dan met de ‘page’ knop naar de ‘calibration’ pagina te bladeren.
Wanneer na calibratie van de sticks de waarde niet op ca. 1500 staat in Cleanflight bij het tabblad ‘Receiver’, dan kun je last krijgen van drift. Dit kun je controleren door de Lipo aan te sluiten als Cleanflight is opgestart. Je ziet dan de exacte mid-stick input in het tabblad ‘Receiver’. Mocht je drift op de Yaw input hebben, dan zou je in de CLI tab de Yaw deadband kunnen verhogen met het commando ‘set yaw_deadband = 4’. Hier had ik zelf dus last van. Yaw gaf ca. 1503 i.p.v. 1500.
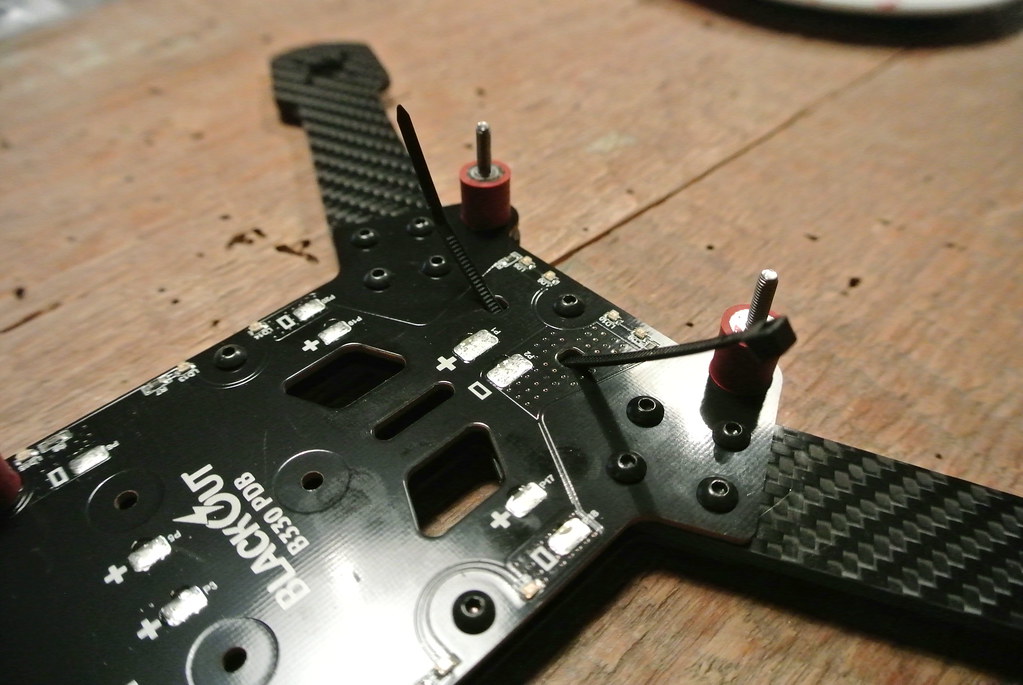
Ook op RC Groups een topic met veel info.
De twee antenne’s van de D4R-II dienen onder een hoek van 90 graden gezet te worden. Ik kon hier geen passende module voor vinden. Uiteindelijk heb ik zelf wat ontworpen in 3D om uit te laten printen via 3D Hubs. Met het gratis browser programme TinkerCAD kun je vrij simpel een ontwerp maken en als STL bestand exporteren. Hier een link naar de antenne mount die ik zelf voor de B330 ontworpen heb. Het is een verbeterde versie dan degene die je op de foto’s ziet. De antenne’s staan nu ook in een hoek van ca. 22 graden t.o.v. het frame. Ik heb RC rietjes van 3mm gebruikt, besteld bij TopRC. De sparingen voor de antenne’s in het 3D ontwerp zijn 4mm omdat tijdens het printen de ABS kunststof wat uit kan zakken.
Uiteindelijk heb ik ook voor de stand van de actie camera (SJ4000) een 3D model ontworpen. Deze zie je niet terug in de afbeeldingen.
Afbeeldingen volgen in onderstaande posts aangezien je niet meer dan 20 afbeeldingen per post kan plaatsen..






")
")