Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Seawolf van Robbe
- Topicstarter Kippetje75
- Startdatum
ik breng het spul zondag gewoon mee (hoewel er niet echt veel aan veranderd is omdat ik zit te wachten op mijn servo's) en als het redelijk droog is haal ik het ook uit de auto.
de tank lijkt op die tanks van engel maar zonder de schakelaars, maar die zal met dit formaat ZEKER niet in een sea wolf gaan passen.
daarom is het ook de bedoeling om deze zeker 50 % korter te maken en voorzien van schakelaars die de moter uitschakelen want anders gaat het gegarandeerd fout.
de moter loopt namelijk gewoon door en duwt dan tegen het deksel.
en ik zal niemand hoeven uit te leggen wat er dan gebeurt als de tank vol zit.
maar dit is tot nu toe alleen maar een idee en het zal nog wel even duren voor het zover is want om dit te realiseren zal er eerst een grotere draaibank moeten komen. en daar zal ik me eerst eens goed in moeten verdiepen want ik wil me niet nog een x vergissen
de tank lijkt op die tanks van engel maar zonder de schakelaars, maar die zal met dit formaat ZEKER niet in een sea wolf gaan passen.
daarom is het ook de bedoeling om deze zeker 50 % korter te maken en voorzien van schakelaars die de moter uitschakelen want anders gaat het gegarandeerd fout.
de moter loopt namelijk gewoon door en duwt dan tegen het deksel.
en ik zal niemand hoeven uit te leggen wat er dan gebeurt als de tank vol zit.
maar dit is tot nu toe alleen maar een idee en het zal nog wel even duren voor het zover is want om dit te realiseren zal er eerst een grotere draaibank moeten komen. en daar zal ik me eerst eens goed in moeten verdiepen want ik wil me niet nog een x vergissen
Hellow,
Ben al een tijdje hier achter de schermen de nodige info aan het verzamelen, heb zo'n kleine 20 jaar geleden ook deze bouwkit van Robbe aangeschaft. Wegens diverse omstandigheden is de bouw in de beginfase toen stilgevallen en heeft hij al die tijd stof mogen eten....
M'n andere passie is karpervissen, wat heden ten dagen ook weer enorme sprongen in evolutie gemaakt heeft en zo bracht één en ander me op het idee om nu eens wat anders dan anders te doen....
Hierbij gaat het me niet om te gaan voeren of m'n vislijn op de juiste plek te kunnen deponeren, doch wel om een beeld te kunnen vormen van de bodemgesteldheid op een water....
Ondertussen is de bouw al wel een heel eindje gevorderd en zou ik hierbij graag jullie reakties en comments te horen krijgen en wie weet zit er iets bij dat kan bijdragen aan jullie bouwplannen....
Fotootjes volgen asap....
Ben al een tijdje hier achter de schermen de nodige info aan het verzamelen, heb zo'n kleine 20 jaar geleden ook deze bouwkit van Robbe aangeschaft. Wegens diverse omstandigheden is de bouw in de beginfase toen stilgevallen en heeft hij al die tijd stof mogen eten....
M'n andere passie is karpervissen, wat heden ten dagen ook weer enorme sprongen in evolutie gemaakt heeft en zo bracht één en ander me op het idee om nu eens wat anders dan anders te doen....
Hierbij gaat het me niet om te gaan voeren of m'n vislijn op de juiste plek te kunnen deponeren, doch wel om een beeld te kunnen vormen van de bodemgesteldheid op een water....
Ondertussen is de bouw al wel een heel eindje gevorderd en zou ik hierbij graag jullie reakties en comments te horen krijgen en wie weet zit er iets bij dat kan bijdragen aan jullie bouwplannen....
Fotootjes volgen asap....
raf
Forum veteraan
hallo eds
dan heb jij een een seawolf type 1
deze komt niet overeen met diegene die marc aan het bouwen is
er zijn toch wel een paar belangrijke verschillen
ben wel benieuwd naar de bodem OP een water
want bij ons zit meestal de bodem aan de onderkant van de vijver LOL
en dat is die kant waar wel helemaal NIET naar toe willen
maar ik ben wel benieuwd wat je hebt inelkaar geknutselt
zal wel met een fish finder en toestanden te maken hebben mijn gedacht
groetjes raf
dan heb jij een een seawolf type 1
deze komt niet overeen met diegene die marc aan het bouwen is
er zijn toch wel een paar belangrijke verschillen
ben wel benieuwd naar de bodem OP een water
want bij ons zit meestal de bodem aan de onderkant van de vijver LOL
en dat is die kant waar wel helemaal NIET naar toe willen
maar ik ben wel benieuwd wat je hebt inelkaar geknutselt
zal wel met een fish finder en toestanden te maken hebben mijn gedacht
groetjes raf
Hey Raf,
Yep, 100% juist, ik heb wel enige aanpassingen gedaan, spijtig genoeg was ik dus reeds helemaal begonnen zoals in de handleiding stond beschreven en zijn er dus wel dingen voor verbetering vatbaar. De voorkant heb ik wel zoals de nieuwe versie uitgevoerd, ja ik gebruik die afgekeurde Robbe sluiting, wel met een stevigere bout in het techrek, lijkt voorlopig te voldoen....
Enne weer juist, fishfinder is voorzien om in te bouwen, doch eerst maar eens bekijken of alles zo al werkt (had vorige weekend op de hengelsportbeurs de verkopers hun gezichten moeten zien toen ik zocht achter zo'n ding, voor welke boot ??? nou gewoon voor een duikboot..... euhhhhhh ????) hier volgend wat snelle fotootjes :

Eerste keer in't nat tijdens de bouw


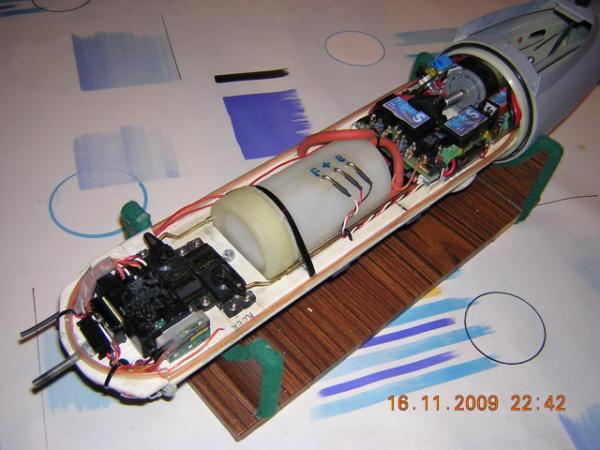
Redelijk gevuld techrek : Duiktank + sturing, lageregler, failsafe enz...
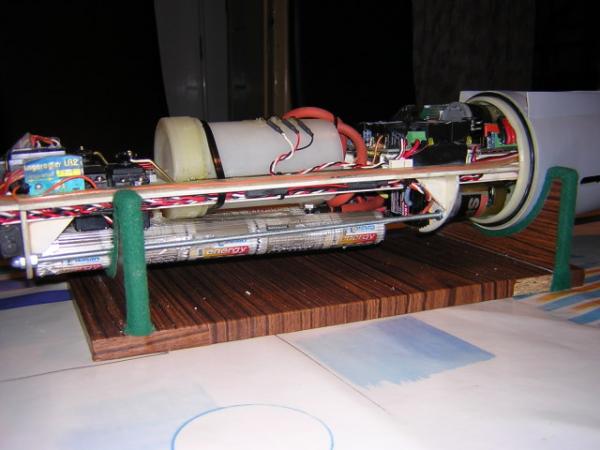
Techrek beetje extra steun door draadstangen M4
Graupner Speed 500e motor met 2.5/1 reductie, 12V 4600Mah NiMH batterij

Aangepaste toegang achteraan, ik heb een hekel aan schroefjes, let niet op de fishfinder antenne...

Afgetopte 60mm schroef beschermd door straalbuisje.
Yep, 100% juist, ik heb wel enige aanpassingen gedaan, spijtig genoeg was ik dus reeds helemaal begonnen zoals in de handleiding stond beschreven en zijn er dus wel dingen voor verbetering vatbaar. De voorkant heb ik wel zoals de nieuwe versie uitgevoerd, ja ik gebruik die afgekeurde Robbe sluiting, wel met een stevigere bout in het techrek, lijkt voorlopig te voldoen....
Enne weer juist, fishfinder is voorzien om in te bouwen, doch eerst maar eens bekijken of alles zo al werkt (had vorige weekend op de hengelsportbeurs de verkopers hun gezichten moeten zien toen ik zocht achter zo'n ding, voor welke boot ??? nou gewoon voor een duikboot..... euhhhhhh ????) hier volgend wat snelle fotootjes :
Eerste keer in't nat tijdens de bouw
Redelijk gevuld techrek : Duiktank + sturing, lageregler, failsafe enz...
Techrek beetje extra steun door draadstangen M4
Graupner Speed 500e motor met 2.5/1 reductie, 12V 4600Mah NiMH batterij
Aangepaste toegang achteraan, ik heb een hekel aan schroefjes, let niet op de fishfinder antenne...
Afgetopte 60mm schroef beschermd door straalbuisje.
Laatst bewerkt door een moderator:
Ja, zo'n TripleS past wel mits de nodige aanpassingen aan de printjes en zoals je merkt zonder de afklem servo en de sturing hiervoor (heb ik zelfs van het printje afgezaagd).
Yup, zo'n fish dinges antenne is voorzien om boven water te blijven en is ook m'n bedoeling om er zo mee te werken. Of ze er echter veel zal opzitten is een andere zaak, is eerder een extra gimmick en als het werkt mooi meegenomen.
Die eerste foto's in't nat zijn wel zonder de TripleS stuurprintjes, die had ik toen nog niet, ook geen pompje wel met duiktank en er ligt vooraan zo'n 150gr lood. Benieuwd hoe ze zich nu gaat gedragen in't water met zo goed als alles ingebouwd en reeds voorzien van enkele laagjes verf.
Yup, zo'n fish dinges antenne is voorzien om boven water te blijven en is ook m'n bedoeling om er zo mee te werken. Of ze er echter veel zal opzitten is een andere zaak, is eerder een extra gimmick en als het werkt mooi meegenomen.
Die eerste foto's in't nat zijn wel zonder de TripleS stuurprintjes, die had ik toen nog niet, ook geen pompje wel met duiktank en er ligt vooraan zo'n 150gr lood. Benieuwd hoe ze zich nu gaat gedragen in't water met zo goed als alles ingebouwd en reeds voorzien van enkele laagjes verf.
(heb ik zelfs van het printje afgezaagd)
AU!
Ik heb de modules sinds kort met of zonder ontvang-failsafe, ik zal er ook een versie bij zetten zonder ventielservo-aansturing. Dat kan inderdaad makkelijk geamputeerd worden. Voor de liefhebbers!
Laatst bewerkt:
@ Lex : was met plaatselijke verdoving...
Probleempje met tank vol ? Heb ik waarschijnlijk al gelezen, maar even kwijt nu.
Tijdens de testen gisterenavond, weliswaar op het droge, maar wel met water voor de duiktank, om de sensoren af te stellen werkte het prima. Was juist even zoeken naar beste manier en plek voor de failsafe of overloop van de tank, zit nu in dat "rubberdarm loopje" achteraan de tank.
Probleempje met tank vol ? Heb ik waarschijnlijk al gelezen, maar even kwijt nu.
Tijdens de testen gisterenavond, weliswaar op het droge, maar wel met water voor de duiktank, om de sensoren af te stellen werkte het prima. Was juist even zoeken naar beste manier en plek voor de failsafe of overloop van de tank, zit nu in dat "rubberdarm loopje" achteraan de tank.
raf
Forum veteraan
hallo eddy
dan kan het zijn dat je reeds de sensor op de juiste plaats hebt zitten
vorige duiktanks waren nog uitgerust met de tankvol detektie IN de duiktank
en dan kon het gebeuren dat de tank toch over liep
de sensor hoort tussen het overloop darmpje te zitten een cm of 4 van de aansluiting
zo stopt de pomp en kan de duiktank niet over lopen
ja Lex zeker auwwwwwwwwww als je ze mooie printjes zo verzagen hahaha
groetjes raf
dan kan het zijn dat je reeds de sensor op de juiste plaats hebt zitten
vorige duiktanks waren nog uitgerust met de tankvol detektie IN de duiktank
en dan kon het gebeuren dat de tank toch over liep
de sensor hoort tussen het overloop darmpje te zitten een cm of 4 van de aansluiting
zo stopt de pomp en kan de duiktank niet over lopen
ja Lex zeker auwwwwwwwwww als je ze mooie printjes zo verzagen hahaha
groetjes raf
Ik ben me niet bewust van een probleem met de vol-detectie, nog van niemand gehoord. Douglas is een geval apart (gniffel...") ) met zijn onder druk vullende tank.
) met zijn onder druk vullende tank.
In principe moet de vol detectie met de plus-voeler helemaal in de tank, en de vol-voeler net een paar mm onder de bovenzijde van de tank werken. Het contact in de overloopslang is dan alleen bedoelt voor de overloop beveiliging. Mocht hij dus om wat voor reden dan toch niet afslaan grijpt de derde melder in zodra er water door de overloopslang loopt, die daarna gereset moet worden.
) met zijn onder druk vullende tank.In principe moet de vol detectie met de plus-voeler helemaal in de tank, en de vol-voeler net een paar mm onder de bovenzijde van de tank werken. Het contact in de overloopslang is dan alleen bedoelt voor de overloop beveiliging. Mocht hij dus om wat voor reden dan toch niet afslaan grijpt de derde melder in zodra er water door de overloopslang loopt, die daarna gereset moet worden.
raf
Forum veteraan
hallo
ha je hebt de print aangepast
ja he ik kan het soms allemaal niet volgen
ja en douglas met zijn hogedruk pomp is inderdaad een geval appart al werkt het wel
ik ben er ook geen voorstander van hoe hij het gedaan heeft want als er ooit ergens een luchtlek ontstaat heeft douglas een probleem
want dan blijft de sub netjes op de bodem liggen
maar hij duikt wel snel dat moet ik wel toegeven
al was het systeem daar helemaal niet voor ontworpen
je ziet waar het allemaal toe kan leiden hahahaha
zit er een zoemer op die failsafe ????
groetjes raf
ha je hebt de print aangepast
ja he ik kan het soms allemaal niet volgen
ja en douglas met zijn hogedruk pomp is inderdaad een geval appart al werkt het wel
ik ben er ook geen voorstander van hoe hij het gedaan heeft want als er ooit ergens een luchtlek ontstaat heeft douglas een probleem
want dan blijft de sub netjes op de bodem liggen
maar hij duikt wel snel dat moet ik wel toegeven
al was het systeem daar helemaal niet voor ontworpen
je ziet waar het allemaal toe kan leiden hahahaha
zit er een zoemer op die failsafe ????
groetjes raf
Owkidoko, dan zit de failsafe op de juiste plek, op de duiktank heb ik een leeg - vol sensor en uiteraard de gemeenschappelijk plus, dan heb ik een "krul" in rubber darm gemaakt aan de ontluchting van de tank, net voor het laagste punt weer stukje messing buis met hierop een draad gesoldeerd voor de overloop detektie. Een zoemer is standaard niet voorzien, maar ga ik wel installeren, lijkt me wel eens zo makkelijk.
Hey Raf,
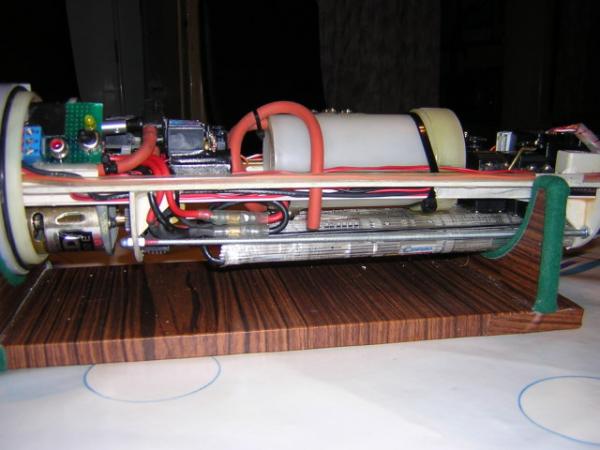
Op foto 7 is het misschien beetje duidelijker dan mijne uitleg, daar zie je die oranje darm lopen :
- Bovenaan de duiktank vertrekt hij in een rondje naar beneden en dan weer omhoog tot hij net wat hoger zit dan in het begin, hierna weer bochtje naar beneden door het techrek waar eventuele druppels op de bodem kunnen vallen, zeker uit de buurt van de electronica.
- Aan het begin ongeveer halfweg, zit dus dat buisje met de failsafe, tank moet eerst helemaal overlopen, de ronde van rubberdarm moet dan ook nog eens vollopen, daarbij wordt het contact gemaakt en gaat de pomp leegpompen en is er nog net die hoger gelegen bocht als extra veiligheid en laatste drempel voor het water.
- Ik heb een messing buisje in de tank zitten voor ontuchting en de failsafe daarop aansluiten werkt niet, dan reageert die te snel en krijg je de tank maar net halfvol.
Mijn uitleg zal wel niet helemaal geweest zijn zoals het moet want ben al een tijdje alle info hier op het forum aan het volgen en heb reeds veel van de tips en raad die je aan andere hebt gegeven toegepast in de mate van het mogelijke. Denk niet dat het subje er zo zou uitgezien hebben zoals ze nu is zonder alle informatie die ik hier op het forum heb gelezen over duikboten. Anyway waar zijn nu opeens de andere bouwers gebleven ??? niet gaan lopen nu omdat er plots twee ouw belgen zijn hé
Op foto 7 is het misschien beetje duidelijker dan mijne uitleg, daar zie je die oranje darm lopen :
- Bovenaan de duiktank vertrekt hij in een rondje naar beneden en dan weer omhoog tot hij net wat hoger zit dan in het begin, hierna weer bochtje naar beneden door het techrek waar eventuele druppels op de bodem kunnen vallen, zeker uit de buurt van de electronica.
- Aan het begin ongeveer halfweg, zit dus dat buisje met de failsafe, tank moet eerst helemaal overlopen, de ronde van rubberdarm moet dan ook nog eens vollopen, daarbij wordt het contact gemaakt en gaat de pomp leegpompen en is er nog net die hoger gelegen bocht als extra veiligheid en laatste drempel voor het water.
- Ik heb een messing buisje in de tank zitten voor ontuchting en de failsafe daarop aansluiten werkt niet, dan reageert die te snel en krijg je de tank maar net halfvol.
Mijn uitleg zal wel niet helemaal geweest zijn zoals het moet want ben al een tijdje alle info hier op het forum aan het volgen en heb reeds veel van de tips en raad die je aan andere hebt gegeven toegepast in de mate van het mogelijke. Denk niet dat het subje er zo zou uitgezien hebben zoals ze nu is zonder alle informatie die ik hier op het forum heb gelezen over duikboten. Anyway waar zijn nu opeens de andere bouwers gebleven ??? niet gaan lopen nu omdat er plots twee ouw belgen zijn hé
raf
Forum veteraan
hallo eddy
bij het originele ontwerp was er maar alleen een tank vol detektie
een messing buisje zat aan de intake en bij de uitgang was er ook een messing buisje maar daar zat een 3 cm siliconen slang en dan de sensor
en dan de siliconen darm naar een potje waar druppels in konden opgevangen worden
zo vaar je steeds met een volle tank wat weer een veel stabieler vaargedrag gaf
daar die lucht bel zich niet steeds een en weer bewoog
toen heeft lex het systeem met toelating van walter en mij op de markt gebracht maar hij had in eerste instantie de tankleeg en de sensoren op een andere plaats gezet
wat soms rare vaarbeelden onder water opleverde vooral als je het model zag varen (mol BV)
maar verder werkt het systeem voortrefelijk en zonder problemen
als je een tijdje met de sub gevaren hebt is het met de losse sensor makkelijker om deze te ontdoen van kalkaanslag door er met een veiltje doorheen te gaan
ik werk met een gelijkstroom detektie en ik weet niet of lex op wissel spanning is over gegaan wat wel goed zou kunnen en dan heb je dit probleem niet meer
toen douglas met zijn hogdruk pomp aan het stoeien was kwam er maar eerst een probleem bij lex zijn systeem kijken
deze pomp is een centrifugaal pomp die het water met een hoge snelheid de duiktank in jaagt
als de tank vol detektie wordt geraakt stopt het pompen maar doordat het nogal een lange tank is komt tijdens het duiken deze sensor weer terug droog te staan en dan slaat de pomp terug aan en dit herhaalde malen zodat de tank meer dan vol kwam te zitten en dus tijdens het opduiken liep er water in de wtc
door de sensor nu IN de siliconen darm op te nemen waar bij u de fail safe zit is dit probleem verholpen
en de meeste duikboot mensen zitten nu in de hobby kamer en zijn volop aan het bouwen voor volgend jaar en hebben geen tijd om achter de pc te duiken
dus geen paniek belgen jagen nederlanders niet weg want we hebben er veel te veel goeie vrienden bij zitten waar we door het jaar veel lol en vaargenot mee kunnen en mogen beleven
groetjes raf
bij het originele ontwerp was er maar alleen een tank vol detektie
een messing buisje zat aan de intake en bij de uitgang was er ook een messing buisje maar daar zat een 3 cm siliconen slang en dan de sensor
en dan de siliconen darm naar een potje waar druppels in konden opgevangen worden
zo vaar je steeds met een volle tank wat weer een veel stabieler vaargedrag gaf
daar die lucht bel zich niet steeds een en weer bewoog
toen heeft lex het systeem met toelating van walter en mij op de markt gebracht maar hij had in eerste instantie de tankleeg en de sensoren op een andere plaats gezet
wat soms rare vaarbeelden onder water opleverde vooral als je het model zag varen (mol BV)
maar verder werkt het systeem voortrefelijk en zonder problemen
als je een tijdje met de sub gevaren hebt is het met de losse sensor makkelijker om deze te ontdoen van kalkaanslag door er met een veiltje doorheen te gaan
ik werk met een gelijkstroom detektie en ik weet niet of lex op wissel spanning is over gegaan wat wel goed zou kunnen en dan heb je dit probleem niet meer
toen douglas met zijn hogdruk pomp aan het stoeien was kwam er maar eerst een probleem bij lex zijn systeem kijken
deze pomp is een centrifugaal pomp die het water met een hoge snelheid de duiktank in jaagt
als de tank vol detektie wordt geraakt stopt het pompen maar doordat het nogal een lange tank is komt tijdens het duiken deze sensor weer terug droog te staan en dan slaat de pomp terug aan en dit herhaalde malen zodat de tank meer dan vol kwam te zitten en dus tijdens het opduiken liep er water in de wtc
door de sensor nu IN de siliconen darm op te nemen waar bij u de fail safe zit is dit probleem verholpen
en de meeste duikboot mensen zitten nu in de hobby kamer en zijn volop aan het bouwen voor volgend jaar en hebben geen tijd om achter de pc te duiken
dus geen paniek belgen jagen nederlanders niet weg want we hebben er veel te veel goeie vrienden bij zitten waar we door het jaar veel lol en vaargenot mee kunnen en mogen beleven
groetjes raf
Hey Raf,
Ben weer mee nu, er waren toen dus maar 2 sensoren, vol & leeg, en op de fotootjes lijkt het nog steeds hetzelfde,
doch er zijn nu dus 3 sensoren, die derde zit beetje te goed verborgen .
.
Maarja, het ziet er nu wel mooi uit, doch spijtig genoeg werkt het niet zoals het zou moeten werken, zal dus nog wel even verder moeten puzzelen.
Een duikboot blijkt toch wat eigenzinnig gedrag te vertonen als ie onder moet...
Ik heb weer enkele testjes achter de rug, zo blijkt dat er nog wat gewicht bijmoet, 260gr in de neus om ze vlak te leggen (de transponder van dat fishding weegt zo'n 60gr).
In de wtc zou ook nog een 350gr bijmoeten zodat ze net met het rakettendek boven ligt.
Maar dan komt de aap uit de mouw, duiktank blijkt te klein. Berekening gaf zo'n 250cc aan, toch gevuld en gewogen is het maar een 170gr.
Hiermee gaat hij zo'n centimetertje onder het wateroppervlak zweven.
Ik moest nu wel wat improviseren met de balast, je hebt geen hele hobbykamer bij op hotel hé :-D maar het gaf me wel een idee hoe het nu werkt.
Er is gelukkig nog wat ruimte in de lengte om de bestaande tank te vergroten en voor het gewicht maar even kijken naar extra batterijen.
Ben weer mee nu, er waren toen dus maar 2 sensoren, vol & leeg, en op de fotootjes lijkt het nog steeds hetzelfde,
doch er zijn nu dus 3 sensoren, die derde zit beetje te goed verborgen
.Maarja, het ziet er nu wel mooi uit, doch spijtig genoeg werkt het niet zoals het zou moeten werken, zal dus nog wel even verder moeten puzzelen.
Een duikboot blijkt toch wat eigenzinnig gedrag te vertonen als ie onder moet...
Ik heb weer enkele testjes achter de rug, zo blijkt dat er nog wat gewicht bijmoet, 260gr in de neus om ze vlak te leggen (de transponder van dat fishding weegt zo'n 60gr).
In de wtc zou ook nog een 350gr bijmoeten zodat ze net met het rakettendek boven ligt.
Maar dan komt de aap uit de mouw, duiktank blijkt te klein. Berekening gaf zo'n 250cc aan, toch gevuld en gewogen is het maar een 170gr.
Hiermee gaat hij zo'n centimetertje onder het wateroppervlak zweven.
Ik moest nu wel wat improviseren met de balast, je hebt geen hele hobbykamer bij op hotel hé :-D maar het gaf me wel een idee hoe het nu werkt.
Er is gelukkig nog wat ruimte in de lengte om de bestaande tank te vergroten en voor het gewicht maar even kijken naar extra batterijen.
raf
Forum veteraan
hallo eddy
ja inden beginne was er maar 1 sensor
dan heeft lex er twee van gemaakt en nu zijn het er drie geworden
ik denk dat lex nog met een aanpassing gaat komen
namelijk deze derde sensor ook als lek detektor gaan gebruiken ??????
moet kunnen (hint hint)
hoeveel ruimte is er nog in de pic processor over ????
een dikker tank is beter dan een langere
dit met het verplaatsten van de soms aanwezige luchtbel
sommige bouwen ook een duiktank in het midden van het tech rek
das de verkeerde plaats
ze moet zoveel mogelijk onder in komen te liggen
zodat je een grote dikke tank kan inbouwen en toch nog plaats over houd voor de kabels langs boven door te voeren
moeilijk weer uit te leggen mijn gedacht
eens zien dat ik een tekening kan maken van wat ik bedoel
groetjes raf
ja inden beginne was er maar 1 sensor
dan heeft lex er twee van gemaakt en nu zijn het er drie geworden
ik denk dat lex nog met een aanpassing gaat komen
namelijk deze derde sensor ook als lek detektor gaan gebruiken ??????
moet kunnen (hint hint)
hoeveel ruimte is er nog in de pic processor over ????
een dikker tank is beter dan een langere
dit met het verplaatsten van de soms aanwezige luchtbel
sommige bouwen ook een duiktank in het midden van het tech rek
das de verkeerde plaats
ze moet zoveel mogelijk onder in komen te liggen
zodat je een grote dikke tank kan inbouwen en toch nog plaats over houd voor de kabels langs boven door te voeren
moeilijk weer uit te leggen mijn gedacht
eens zien dat ik een tekening kan maken van wat ik bedoel
groetjes raf