Halo Hayabusa,
Nu volg ik het niet meer.
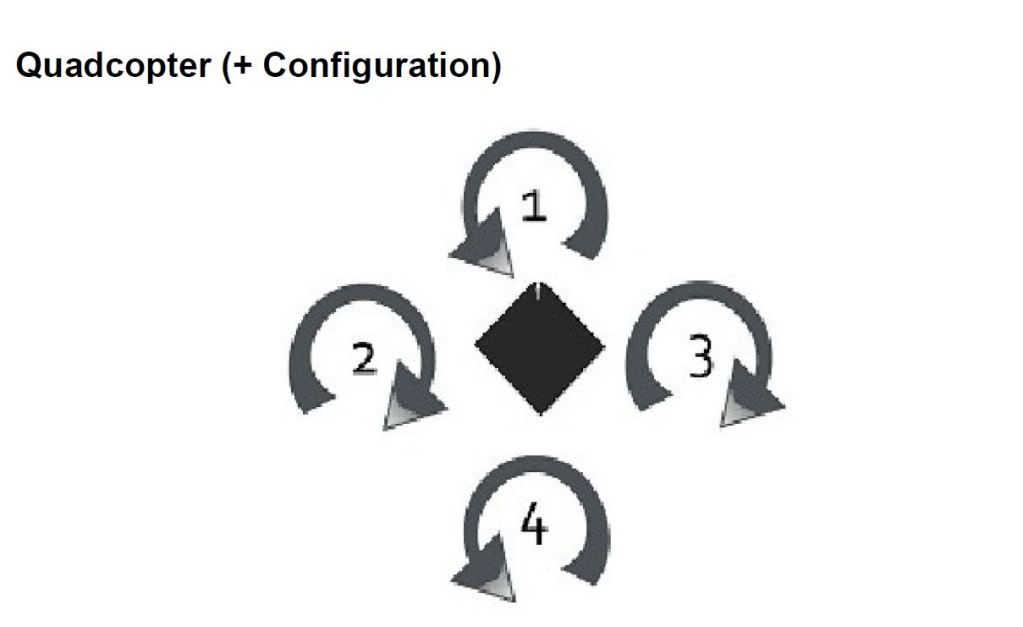
In het bericht hier boven zeg je dat de handleiding degene is die je gebruikt hebt.
daarin staan de motoren als volgt getekend.
In bericht 69 zeg je het volgende:
In het tekeningetje waarin de draairicht van de motoren word aangegeven moet links en rechts omgedraaid worden, ander klopt de text over het controleren van de yaw-giro niet.
Zelfde tekeningtje als boven dus
Als jij links en recht om draait dan lopen toch alle motoren dezelfde kant op.
Of heb je ook de bovenste en onderste omgekeerd?
Nu volg ik het niet meer.
In het bericht hier boven zeg je dat de handleiding degene is die je gebruikt hebt.
daarin staan de motoren als volgt getekend.
In bericht 69 zeg je het volgende:
In het tekeningetje waarin de draairicht van de motoren word aangegeven moet links en rechts omgedraaid worden, ander klopt de text over het controleren van de yaw-giro niet.
Zelfde tekeningtje als boven dus
Als jij links en recht om draait dan lopen toch alle motoren dezelfde kant op.
Of heb je ook de bovenste en onderste omgekeerd?
Laatst bewerkt:
")




")