Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Show hier je Multicopter, foto's en spec's!!
- Topicstarter EricW
- Startdatum
Laat mij als newbie dan maar het spits afbijten. Hieronder mijn Gaui 330x-s. Op de windshield en het onderstel/cameramount na helemaal origineel, zo uit de doos. Ik vlieg de gaui i.c.m. een Spektrum dx6i.

Laatst bewerkt door een moderator:
Bird Of Prey


Op basis van de X-Ufo!
Op basis van de X-Ufo!
Laatst bewerkt door een moderator:

ontwerp in de maak.
dit is me eerste frame om te testen van het voor jaar maak ik een knap model eigen ontwerp.
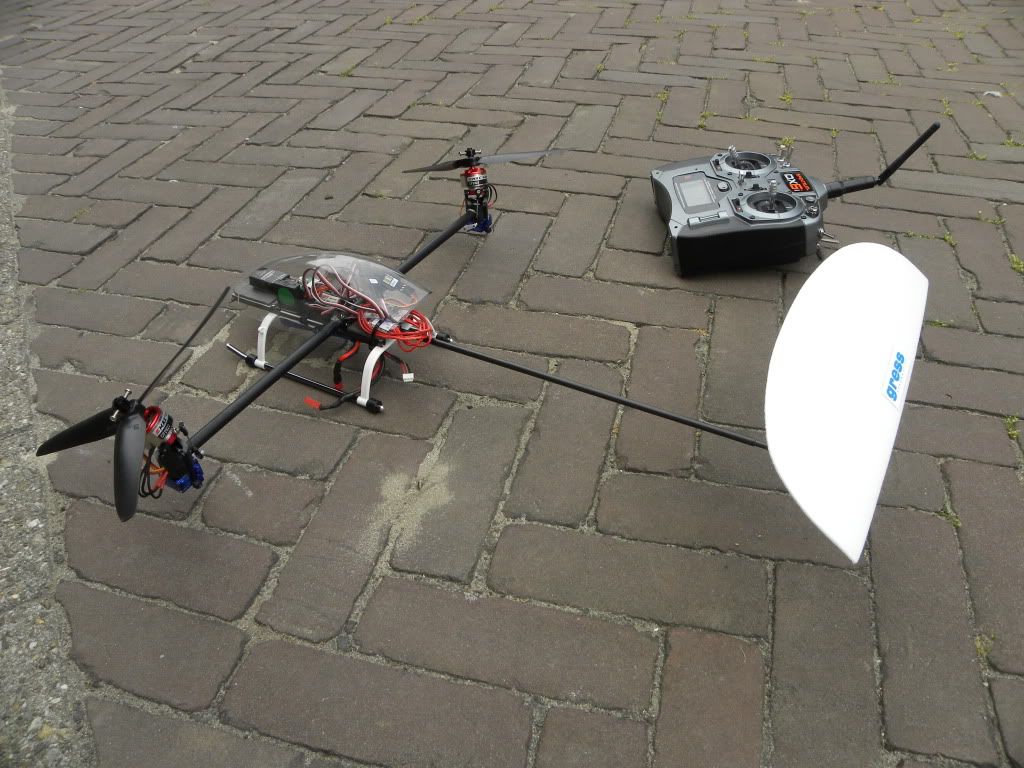
Dit zijn toch in principe ook multicopters, dus ik zal het er toch maar bij posten. Eerst twee eigen knutsels, daarna een commercieel verkochte variant van VTOL Bicopters - UAVs and R/C Hobby.
Ik ben begonnen met dit:

Het idee is dat de motoren/rotors gezwenkt worden voor pitch en yaw besturing, maar dat ze ipv recht naar voren of achteren onder een hoek van 45 graden worden gezwenkt, dus dat ze tegelijk naar binnen en buiten zwenken. Een beetje moeilijk uit te leggen, maar doordat je de rotors niet recht naar voren of achteren zwenkt kan je gyroscopische precessie gebruiken om pitch te ondersteunen, in plaats van het tegen te werken. Immers, als je recht naar voren/achteren zwenkt, zullen de rotors zich hiertegen verzetten en zal de romp de andere kant op zwenken.
Verder heb ik twee 450 size tail rotors gebruikt, om de pitch van de rotors differentieel aan te kunnen passen, zodat ik een efficiente rollbesturing had.
Overigens, pitch en yaw zijn op de zender met elkaar gemixed, maar moesten wel allebij gyro gestabiliseerd worden. Om dit voor elkaar te krijgen hebben allebij de servo's hun eigen gyro die 45 graden gekanteld ligt, om zowel pitch en yaw te meten. Tegenover elkaar staan ze onder een hoek van 90 graden, waardoor de outputs bij elkaar precies kloppen, en je dus je multicopter gyro gestabiliseerd hebt, door twee gemixte signalen te gebruiken
Makkelijker zou natuurlijk zijn, wanneer je niks op de zender mixt, maar gewoon aan de ontvanger twee gyros koppelt, aan het yaw en aan het pitch kanaal, en dan de gyro outputs een Vtail Mixer instuurt. Veel experimenteren liet alleen al snel blijken dat Vtail mixers en gyros totaal niet goed samengaan") , vandaar de twee 45 graden gekantelde gyros.
, vandaar de twee 45 graden gekantelde gyros.
Zo zag het eind testmodel er uit:



Het model deed het overigens best aardig, maar de rolbesturing was erg slecht, in principe waren de twee tail rotors niet nauwkeurig genoeg om het model goed level te houden.
Ik heb vervolgens uit canada een Vector 450 bestelt, het is in feite hetzelfde model, alleen zit er een electronische unit in, die bestaat uit een paar gws gyro's en wat speciale vtail mixers, die tóch goed samenwerken. Ook is de rolbesturing gedaan door de toerentallen van de props te variëren, niet door collective pitch.


Groetjes
Marijn
Ik ben begonnen met dit:
Het idee is dat de motoren/rotors gezwenkt worden voor pitch en yaw besturing, maar dat ze ipv recht naar voren of achteren onder een hoek van 45 graden worden gezwenkt, dus dat ze tegelijk naar binnen en buiten zwenken. Een beetje moeilijk uit te leggen, maar doordat je de rotors niet recht naar voren of achteren zwenkt kan je gyroscopische precessie gebruiken om pitch te ondersteunen, in plaats van het tegen te werken. Immers, als je recht naar voren/achteren zwenkt, zullen de rotors zich hiertegen verzetten en zal de romp de andere kant op zwenken.
Verder heb ik twee 450 size tail rotors gebruikt, om de pitch van de rotors differentieel aan te kunnen passen, zodat ik een efficiente rollbesturing had.
Overigens, pitch en yaw zijn op de zender met elkaar gemixed, maar moesten wel allebij gyro gestabiliseerd worden. Om dit voor elkaar te krijgen hebben allebij de servo's hun eigen gyro die 45 graden gekanteld ligt, om zowel pitch en yaw te meten. Tegenover elkaar staan ze onder een hoek van 90 graden, waardoor de outputs bij elkaar precies kloppen, en je dus je multicopter gyro gestabiliseerd hebt, door twee gemixte signalen te gebruiken
Makkelijker zou natuurlijk zijn, wanneer je niks op de zender mixt, maar gewoon aan de ontvanger twee gyros koppelt, aan het yaw en aan het pitch kanaal, en dan de gyro outputs een Vtail Mixer instuurt. Veel experimenteren liet alleen al snel blijken dat Vtail mixers en gyros totaal niet goed samengaan
, vandaar de twee 45 graden gekantelde gyros.Zo zag het eind testmodel er uit:
Het model deed het overigens best aardig, maar de rolbesturing was erg slecht, in principe waren de twee tail rotors niet nauwkeurig genoeg om het model goed level te houden.
Ik heb vervolgens uit canada een Vector 450 bestelt, het is in feite hetzelfde model, alleen zit er een electronische unit in, die bestaat uit een paar gws gyro's en wat speciale vtail mixers, die tóch goed samenwerken. Ook is de rolbesturing gedaan door de toerentallen van de props te variëren, niet door collective pitch.
Groetjes
Marijn









Ja en de bedrading.Coole quads komen er voorbij!
VEJ, ik weet niet wat ik zie! Volgens mij alleen de regelaars en motoren gebruikt van mijn ex-quad?

Ik heb de poten nog die wil ik er op een of andere manier aan bevestigen zodat hij hoger staat.
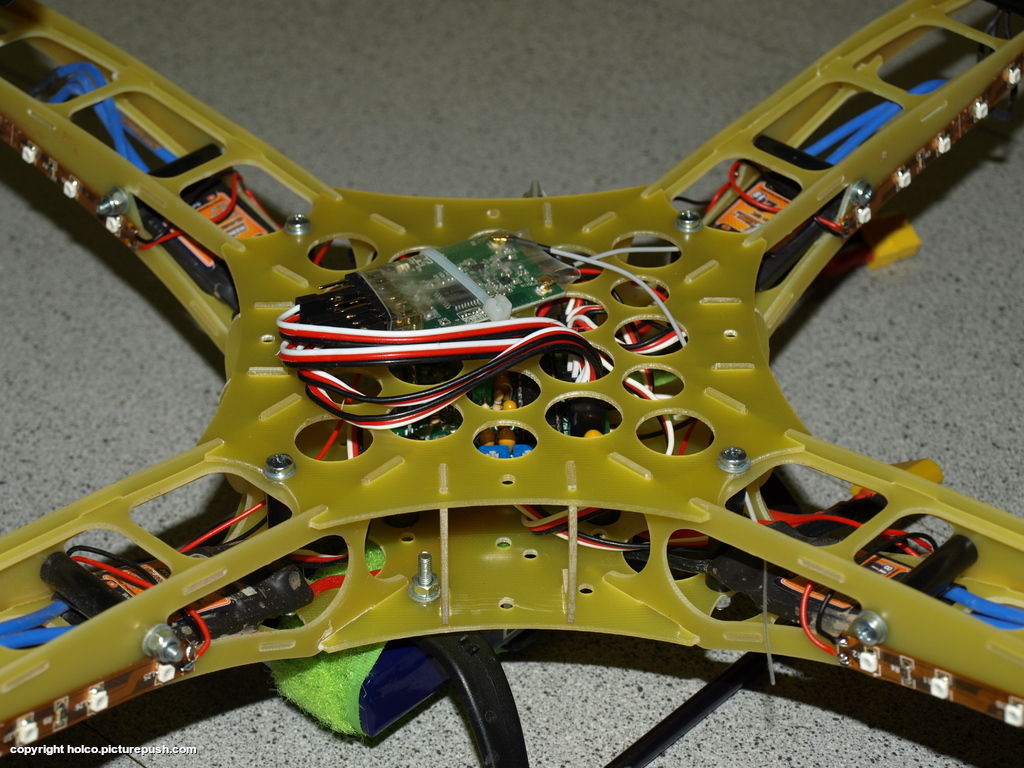
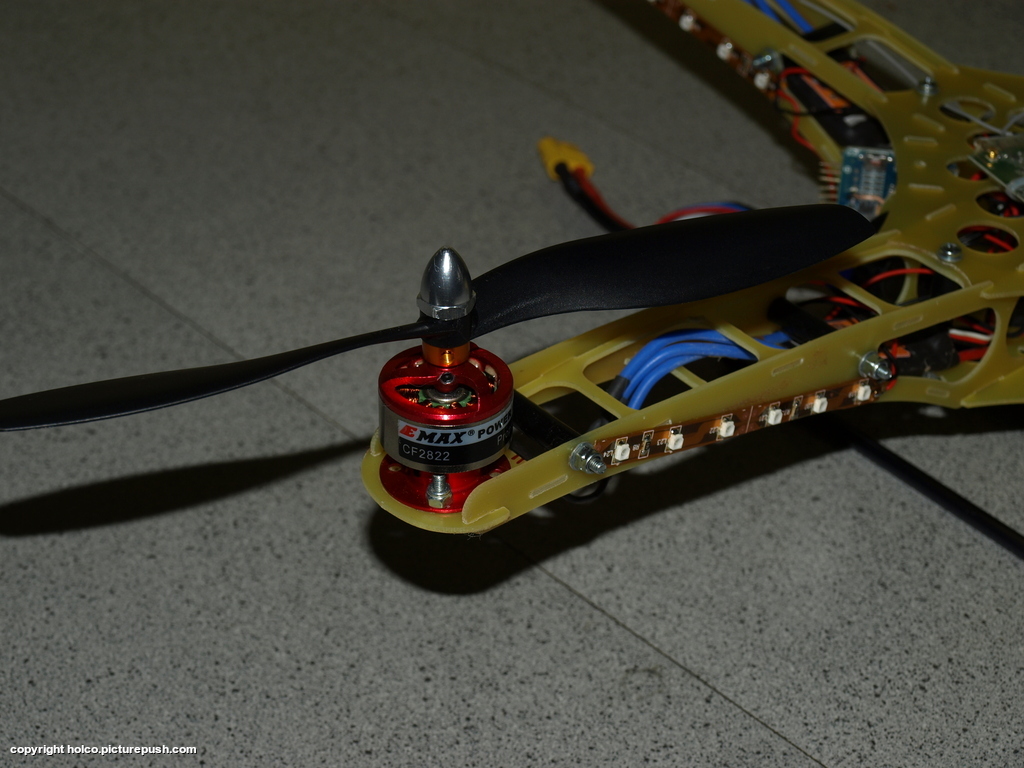
KK-board (Naill) + configuratie
Jakub Quad frame
4x Emax CF2822 motoren
4x Gaui 330X propellers
4x Hobbyking SS Series 18-20A ESC (card programmable)
Nano-Tech 3S 3000mAh lipo's
MTTEC BS6 lipo safe
Futaba T12FG 2.4Ghz zender
HobbyKing OrangeRx Futaba FASST 8Ch ontvanger
Turnigy High Density light strips (rood/blauw)
875 gram vliegklaar

Jakub Quad frame
4x Emax CF2822 motoren
4x Gaui 330X propellers
4x Hobbyking SS Series 18-20A ESC (card programmable)
Nano-Tech 3S 3000mAh lipo's
MTTEC BS6 lipo safe
Futaba T12FG 2.4Ghz zender
HobbyKing OrangeRx Futaba FASST 8Ch ontvanger
Turnigy High Density light strips (rood/blauw)
875 gram vliegklaar
Laatst bewerkt door een moderator:
Psygho (Emil)
Forum veteraan
Op zich mooi frame, je kan alles wel heel makkelijk weg werken...
Mijn MultiWii Tricopter

Een klein filmpje, sorry voor de DSC kwaliteit.
Specs:
3x Turnigy 2204-14T 19g
3x Turnigy Plush 10A
3x GWS EP Prop DD-7035
Turnigy 1300mAh 3S 25C
Spektrum DX7 with Hobbyking OrangeRX
PID roll & pitch: 2,7 ~ 0.030 ~ -12
PID yaw: 8 ~ 0 ~ 0
Max. yaw rate.
Een klein filmpje, sorry voor de DSC kwaliteit.
Specs:
3x Turnigy 2204-14T 19g
3x Turnigy Plush 10A
3x GWS EP Prop DD-7035
Turnigy 1300mAh 3S 25C
Spektrum DX7 with Hobbyking OrangeRX
PID roll & pitch: 2,7 ~ 0.030 ~ -12
PID yaw: 8 ~ 0 ~ 0
Max. yaw rate.
Laatst bewerkt door een moderator:
kerst fun.
Laatst bewerkt door een moderator:


bij deze dan mijn MultiWiicopter, de setup is als volgt:
- Arduino nano V3
- Wii motion plus clone
- Turnigy Plush 10a esc
- KDA20-50
- Gaui props
- Turnigy 3s 30c 1300mah accu
- hobbycity led's
Binnenkort ga ik nog proberen de Wii nunchuck werkend te krijgen, en er een camera onder te hangen.
Dan de foto's :


The Brain

Met verlichting

En nog een paar "in fligth" foto's.



- Arduino nano V3
- Wii motion plus clone
- Turnigy Plush 10a esc
- KDA20-50
- Gaui props
- Turnigy 3s 30c 1300mah accu
- hobbycity led's
Binnenkort ga ik nog proberen de Wii nunchuck werkend te krijgen, en er een camera onder te hangen.
Dan de foto's :
The Brain
Met verlichting
En nog een paar "in fligth" foto's.
Van de week nieuwe motoren en propellers geplaatst.
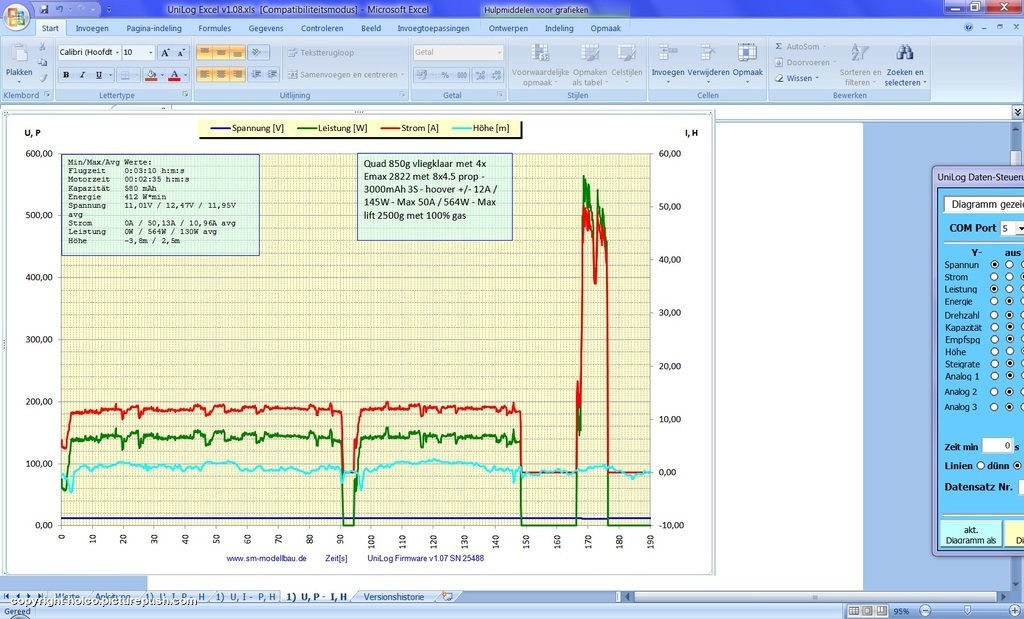
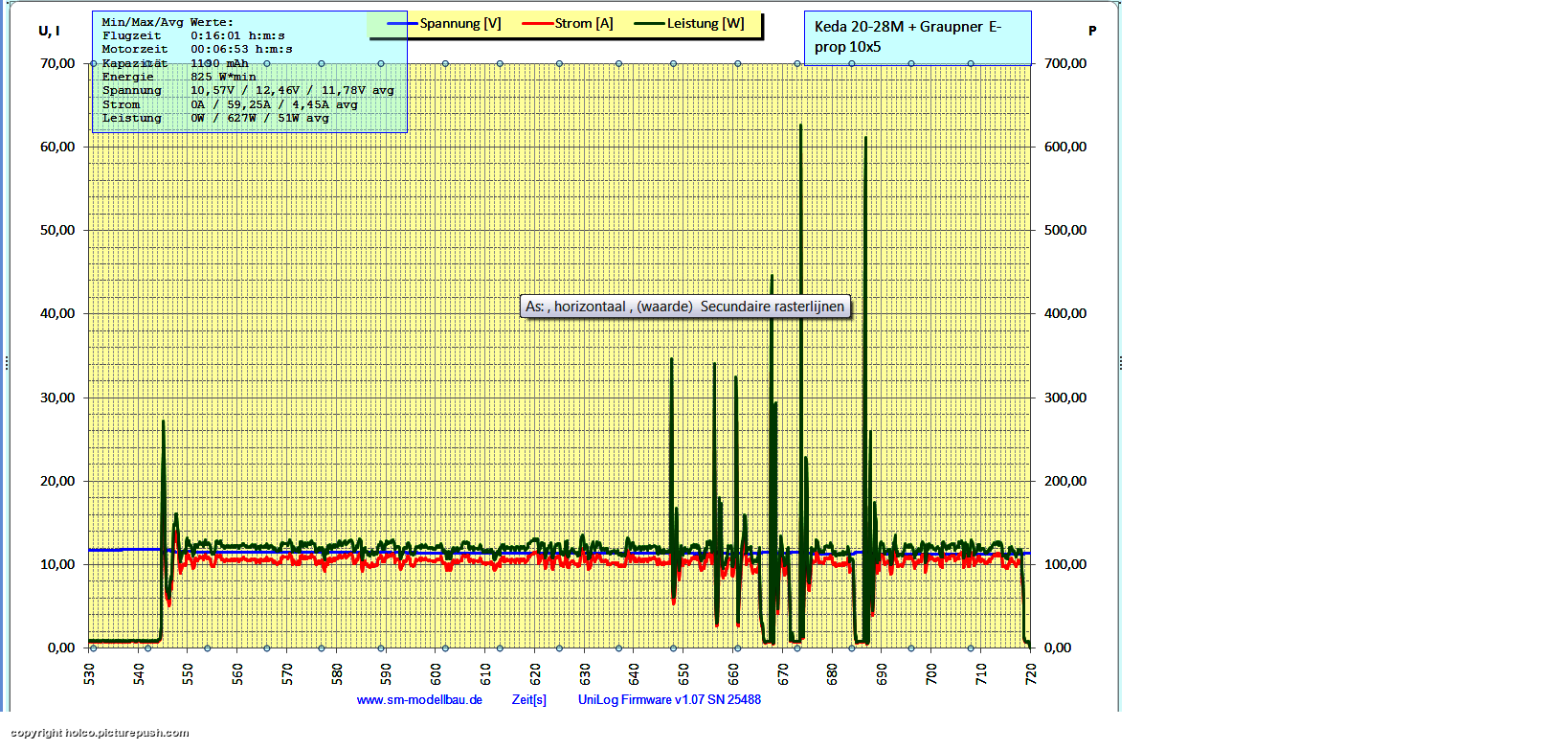
Keda 20-28M ( https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=4701 ) + Graupner E-prop 10x5, loopt mooier door de betere lagers meer power (625W) en tijdens hooveren (10A) 2A minder verbruik, nu in plaats van 10min 13min op een 3S 3000mAh.
Als je iets zoekt met 750g lift vermogen per motor is er imo geen betere combo als dit
Filmpje, gain van yaw nick en roll staan hier maar voor een kwart open dus er kietelig.
Nog wat foto's,



Keda 20-28M ( https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=4701 ) + Graupner E-prop 10x5, loopt mooier door de betere lagers meer power (625W) en tijdens hooveren (10A) 2A minder verbruik, nu in plaats van 10min 13min op een 3S 3000mAh.
Als je iets zoekt met 750g lift vermogen per motor is er imo geen betere combo als dit
Filmpje, gain van yaw nick en roll staan hier maar voor een kwart open dus er kietelig.
Nog wat foto's,
Laatst bewerkt door een moderator: