Hallo,
Ik was niet helemaal tevreden met het feit dat er in de U 31 geen trimmogelijkheid zat. De zuigertank (Robbe, dus Engel) is van het vol-leeg type met alleen eindschakelaars. Om een trimmogelijkheid te maken heb ik die omgebouwd naar proportioneel, waarbij de laatste 10% van de slag 'luistert' naar de stand van de bedieningsschuif. Hieronder de stappen:
De originele toestand

De opengeschroefde tank. Rechtsboven zit de messing plunjer die de 'vol' schakalaar bedient. Ik dacht trouwens altijd dat Engel O-ringen als afdichting gebruikte. Deze zuiger is één geheel met de afdichtingen, die een dubbele afdichting naar beide zijden maken.

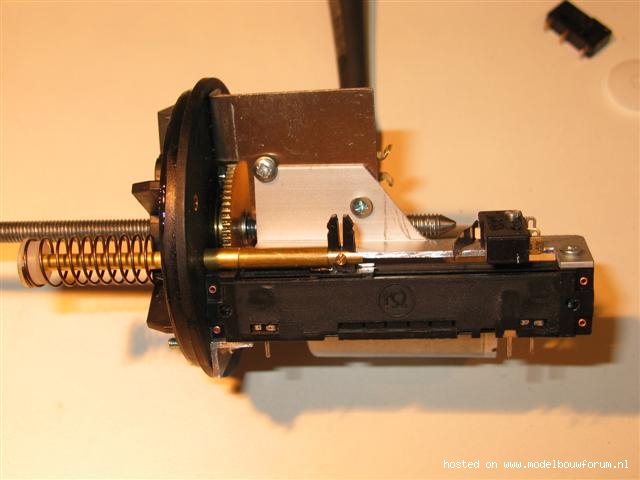
En hier omgebouwd naar een plunjer met grotere slag, met een andere veer en een langere bedieningsstang voor naar de schuif potmeter

De schuifpotmeter van 4,7K er aan. Er wordt maar het middendeel van de slag gebruikt.
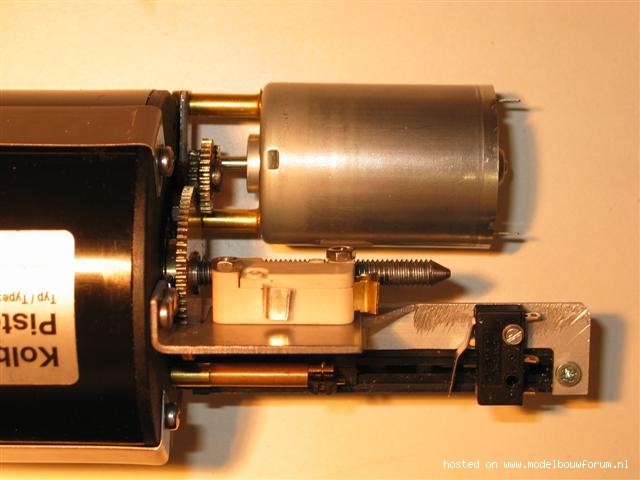
Hier zijn de eindschakelaars te zien. 'Leeg' is de originele van Engel, 'Vol' is die kleinere zwarte achterop de schuifpot geworden.
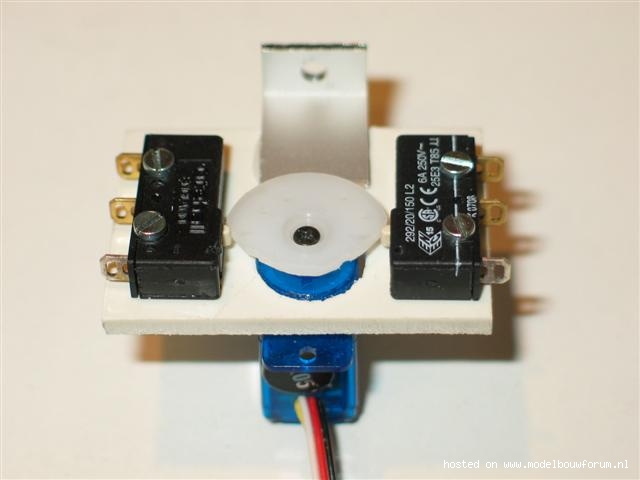
Een servo als aansturing. Hier heb ik weer parallel aan de terugkoppel potmeter draadjes gesoldeerd die naar de schuifpot gaan. Zo krijgt de servo terugkoppeling van waar de zuiger staat.
En alles opgebouwd en bedraad

Hier nog een filmpje van hoe het nu werkt. In de vrije slag kan de tank gewoon vol en leeg gestuurd worden alsof er geen proportioneel deel aan zit. in het propertionele deel volgt de zuiger de schuif op de zender.
Benodigd voor dit alles:
-langer veer voor de plunjer
-schuifpotmeter
-twee grote diodes
-mini servo
-drie micro-switches
-alu-profiel
-messing buis
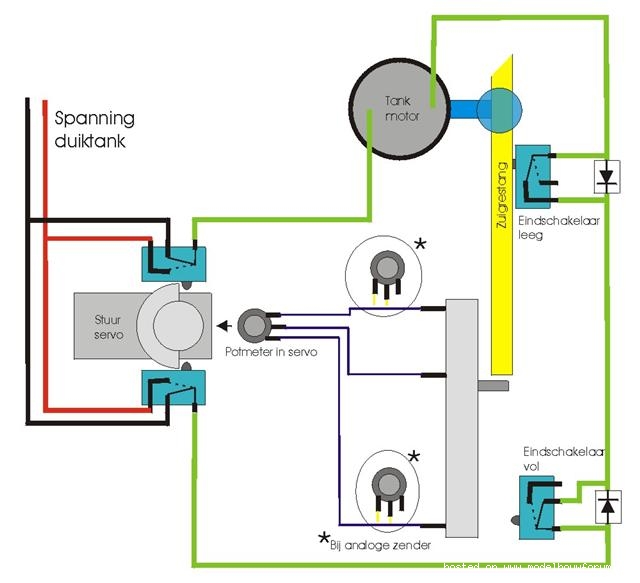
Met de servouitslag en subtrim op mijn FX-18 is het dan heel mooi af te regelen. Op een analoge zender kan dat ook, maar dan moet je twee trimpotjes voor en achter de schuifpotmeter zetten. Dan kan het daarmee afgeregeld worden. Als laatste het schema van de aansluitingen.
Ik was niet helemaal tevreden met het feit dat er in de U 31 geen trimmogelijkheid zat. De zuigertank (Robbe, dus Engel) is van het vol-leeg type met alleen eindschakelaars. Om een trimmogelijkheid te maken heb ik die omgebouwd naar proportioneel, waarbij de laatste 10% van de slag 'luistert' naar de stand van de bedieningsschuif. Hieronder de stappen:
De originele toestand
De opengeschroefde tank. Rechtsboven zit de messing plunjer die de 'vol' schakalaar bedient. Ik dacht trouwens altijd dat Engel O-ringen als afdichting gebruikte. Deze zuiger is één geheel met de afdichtingen, die een dubbele afdichting naar beide zijden maken.
En hier omgebouwd naar een plunjer met grotere slag, met een andere veer en een langere bedieningsstang voor naar de schuif potmeter
De schuifpotmeter van 4,7K er aan. Er wordt maar het middendeel van de slag gebruikt.
Hier zijn de eindschakelaars te zien. 'Leeg' is de originele van Engel, 'Vol' is die kleinere zwarte achterop de schuifpot geworden.
Een servo als aansturing. Hier heb ik weer parallel aan de terugkoppel potmeter draadjes gesoldeerd die naar de schuifpot gaan. Zo krijgt de servo terugkoppeling van waar de zuiger staat.
En alles opgebouwd en bedraad
Hier nog een filmpje van hoe het nu werkt. In de vrije slag kan de tank gewoon vol en leeg gestuurd worden alsof er geen proportioneel deel aan zit. in het propertionele deel volgt de zuiger de schuif op de zender.
Benodigd voor dit alles:
-langer veer voor de plunjer
-schuifpotmeter
-twee grote diodes
-mini servo
-drie micro-switches
-alu-profiel
-messing buis
Met de servouitslag en subtrim op mijn FX-18 is het dan heel mooi af te regelen. Op een analoge zender kan dat ook, maar dan moet je twee trimpotjes voor en achter de schuifpotmeter zetten. Dan kan het daarmee afgeregeld worden. Als laatste het schema van de aansluitingen.
Laatst bewerkt door een moderator:
 roost:
roost:
")

")

