Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
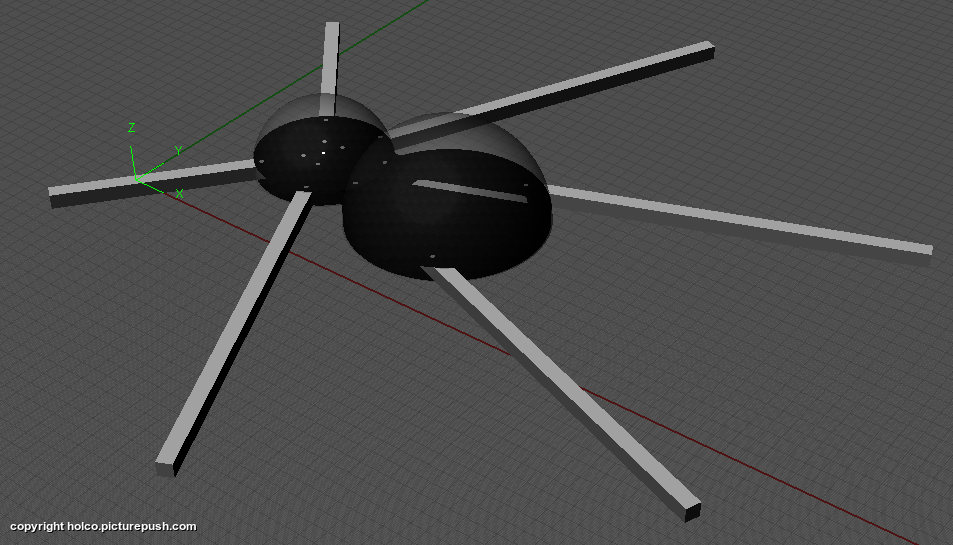
Arduspyder
- Topicstarter holco
- Startdatum
1.05 is een vid mod meer niet. http://api.ning.com/files/sMwCuEF6L...*MTfECR02BwhqQ__/missionplanner.png?width=750
")
")
Zooo, hee dat ziet er netjes afgewerkt uit, ben benieuwd naar het eindresultaat.
mvg, moelie.
mvg, moelie.
ziet er strak uit hoor.
ziet er zeker goed uit,kan niet wachten tot hij af is!
gr
martin
gr
martin
We willen foto's !!!


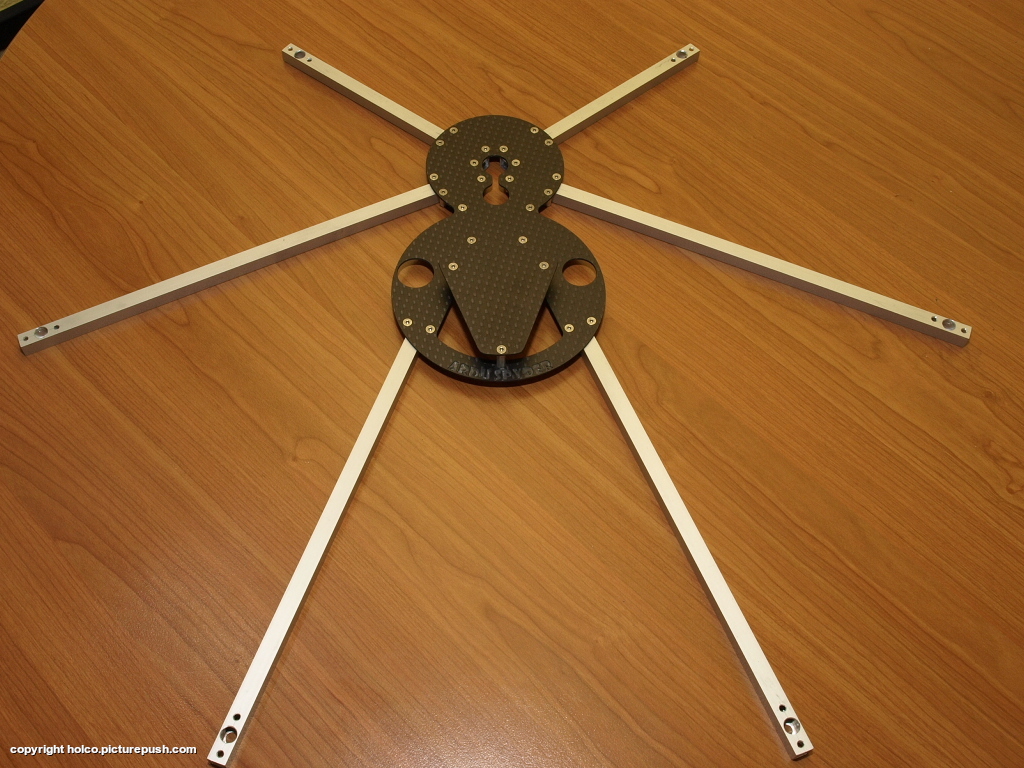

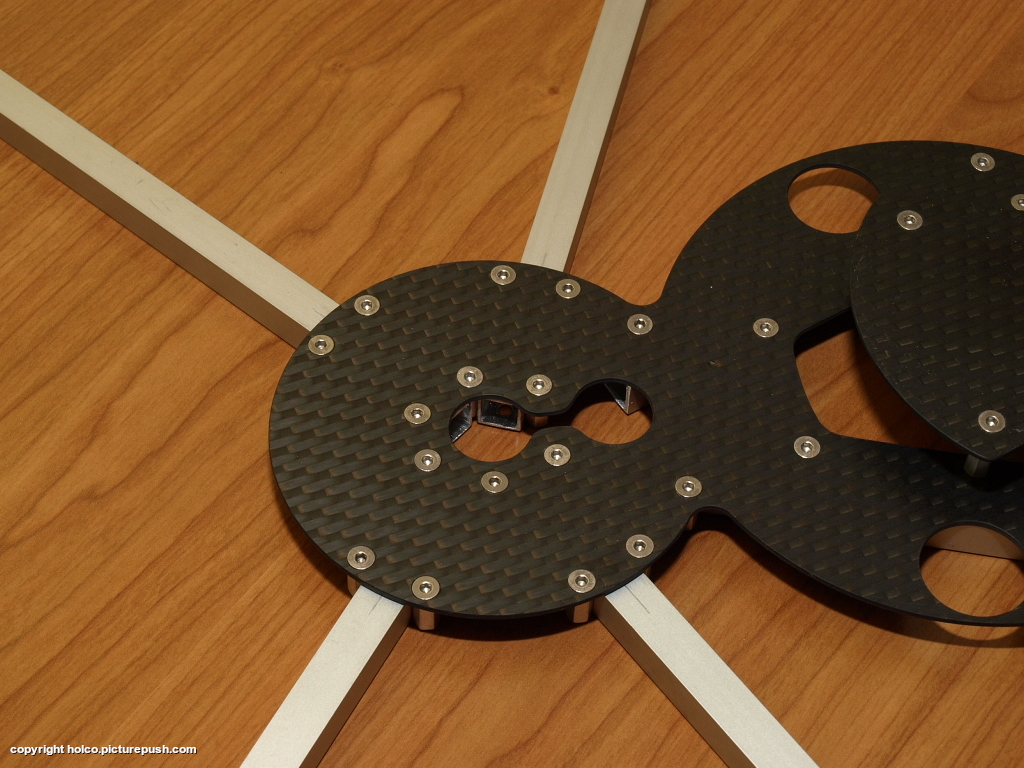


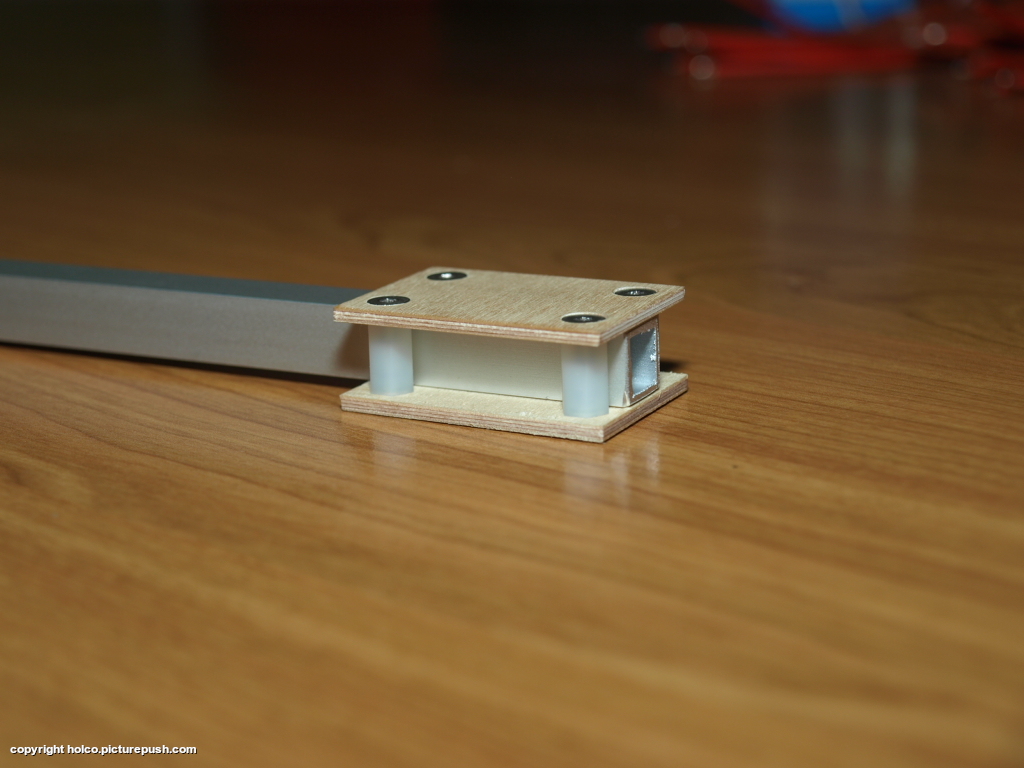
't is effe figuurzagen, maar dan heb je wel wat. roost:
roost:
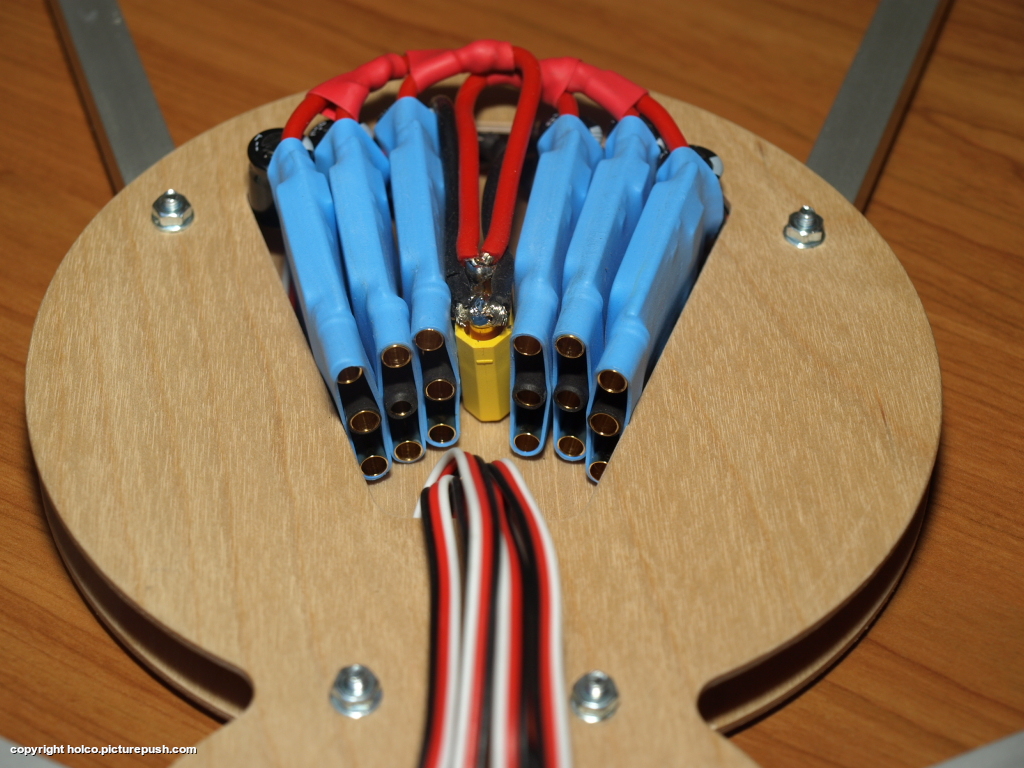
roost:Ja Pieter puur vakwerk wat je geleverd hebt roost:
roost:'t is effe figuurzagen, maar dan heb je wel wat.
Hoe zit het met de passing van de buizen?
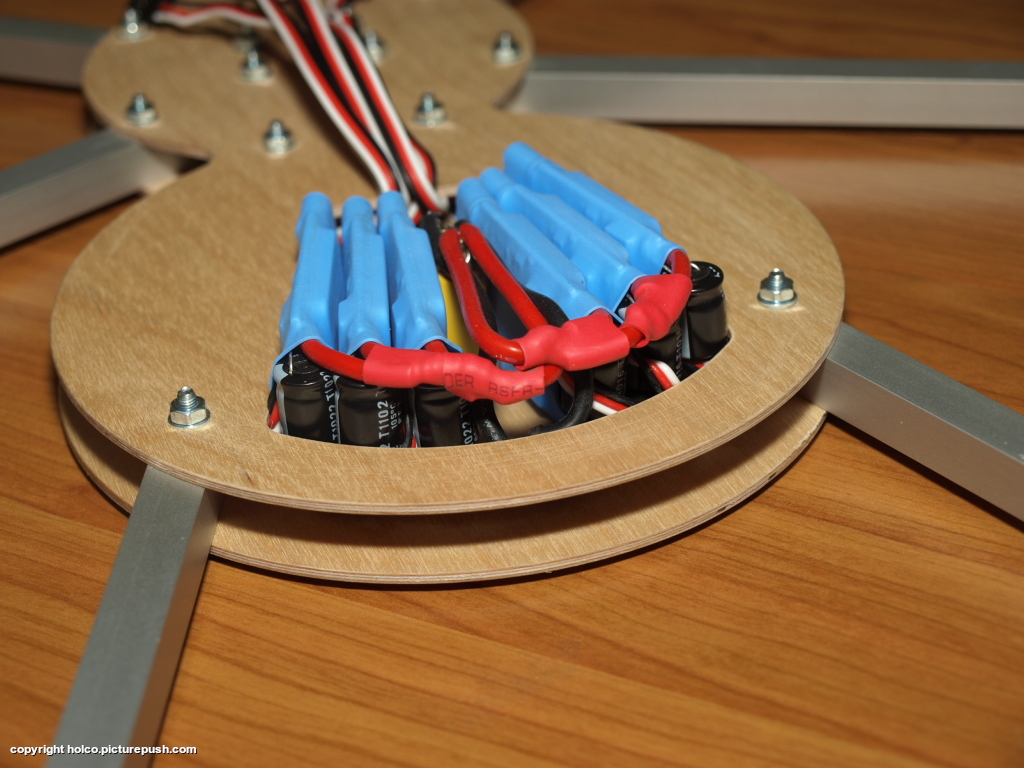
het word steeds mooier!