Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Bouw van een PRNTQB V2 3D Printer
- Topicstarter prop-er
- Startdatum
Helder. Ik zie dat je maar 1 fan hebt. Ga je die gebruiken om het hot end te koelen voor het bridgen of voor de koeling van het cool end? Ik heb namelijk de ervaring met PLA met mijn extruder, budaschnozzle, dat de passieve koeling niet genoeg is waardoor het PLA al zacht is voordat het de extruder. De zachte PLA drukt dan in elkaar en past dan niet meer in de extruder dus loopt je printer vast..
prop-er
Forum veteraan
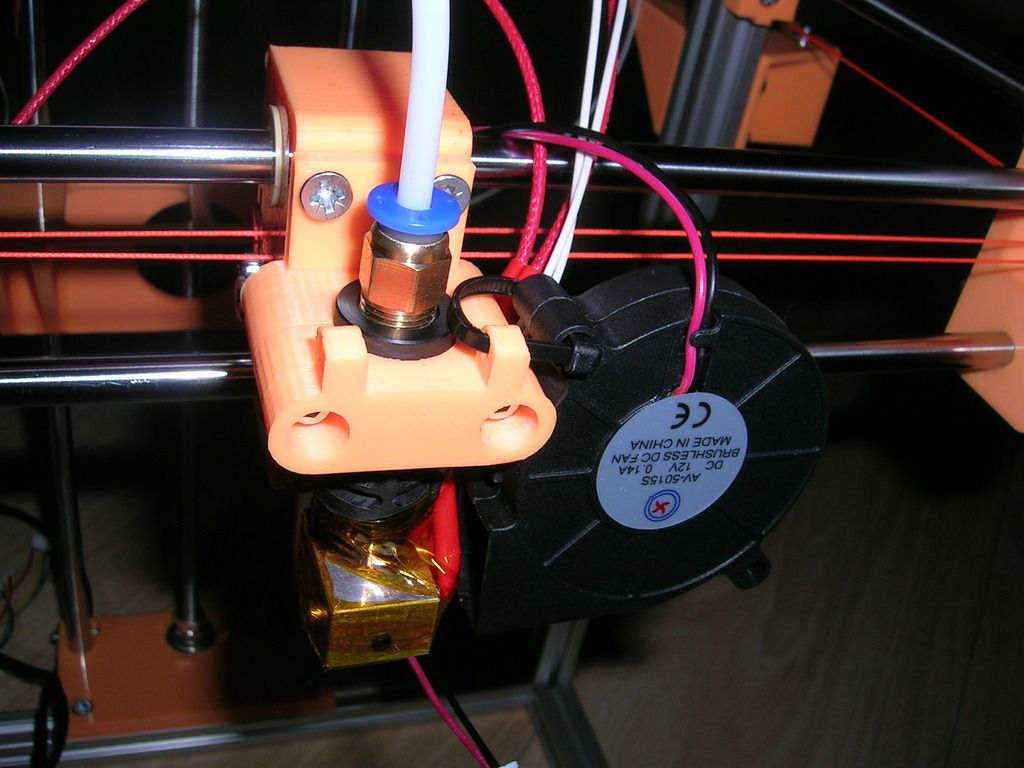
Ik ga daar bij gewoon af op de foto's en video's van Andy, de ontwerper van deze printer. Zo te zien blaast de blower net boven het hot-end. Dat lijkt me een mooi uitgangspunt.
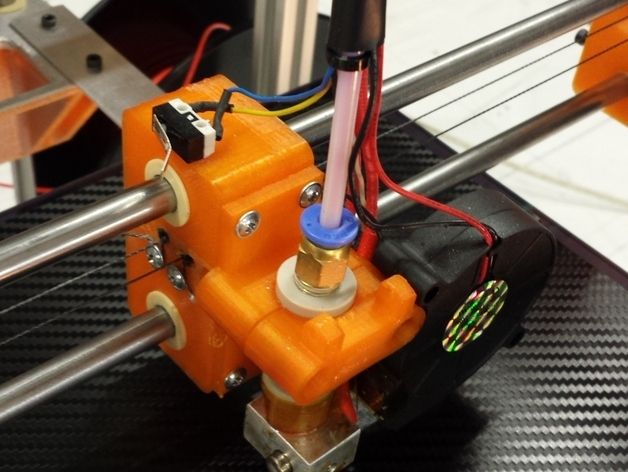
Ik moet trouwens nog wel iets controleren/ modificeren aan de J-head:
Ik moet trouwens nog wel iets controleren/ modificeren aan de J-head:
You need to dis-assemble it and fit a short piece of 4mm ID tube (about 3mm) between the pneumatic fitting and the PTFE tube inside to stop the PTFE tube moving in the PEEK housing. After that simple mod it's an excellent hot end. I use them on my Cherry Pi range.
prop-er
Forum veteraan
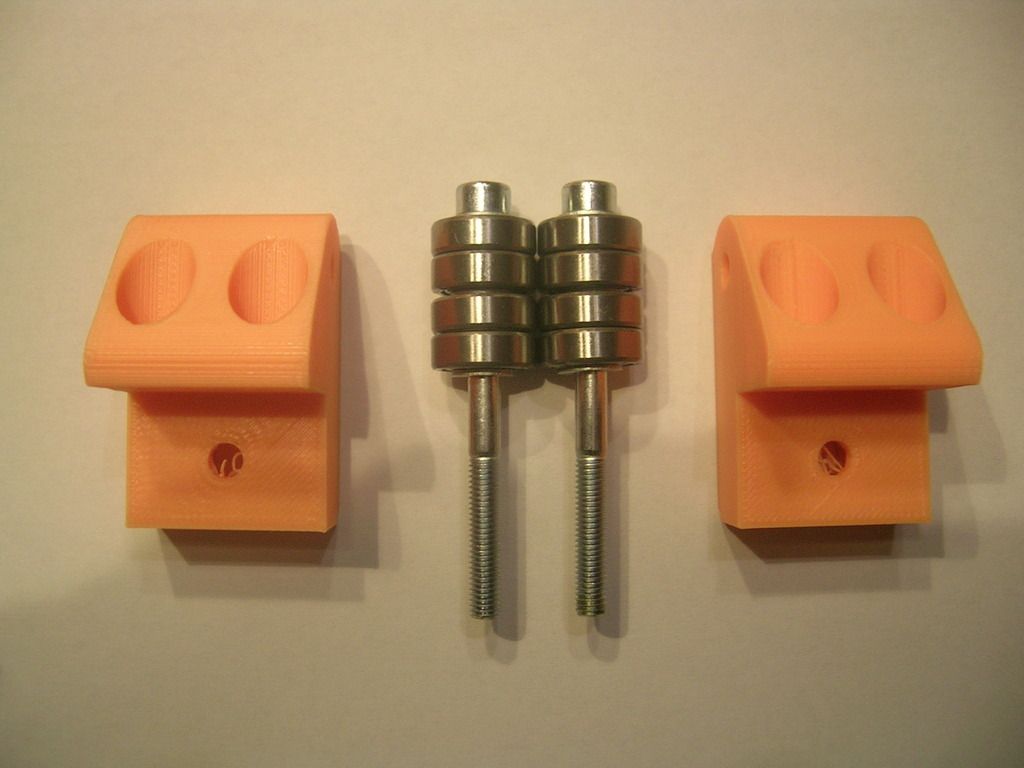
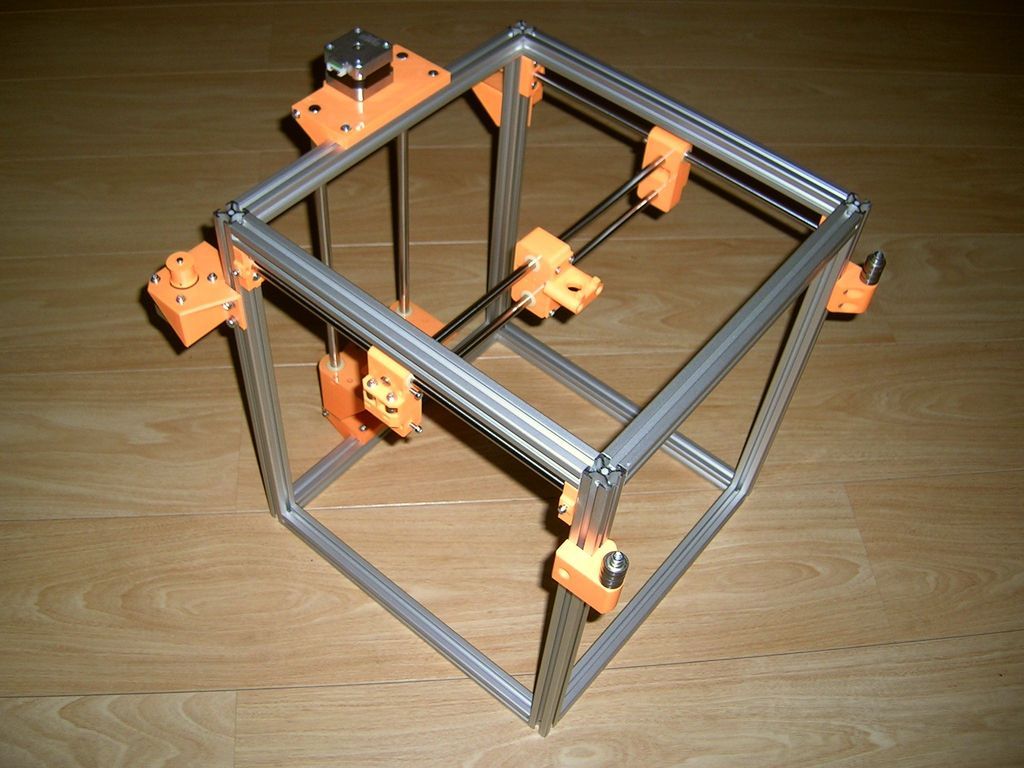
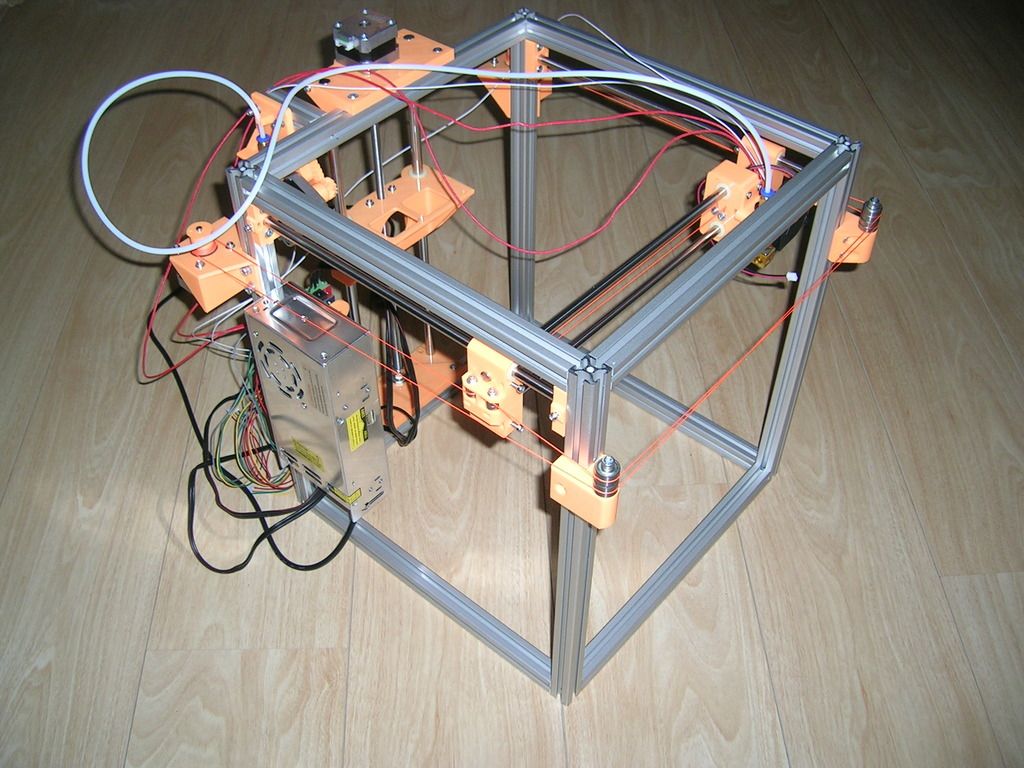
Vandaag een hoopje oranje onderdelen opgehaald:

En dan is het een kwestie van in elkaar schroeven/schuiven:
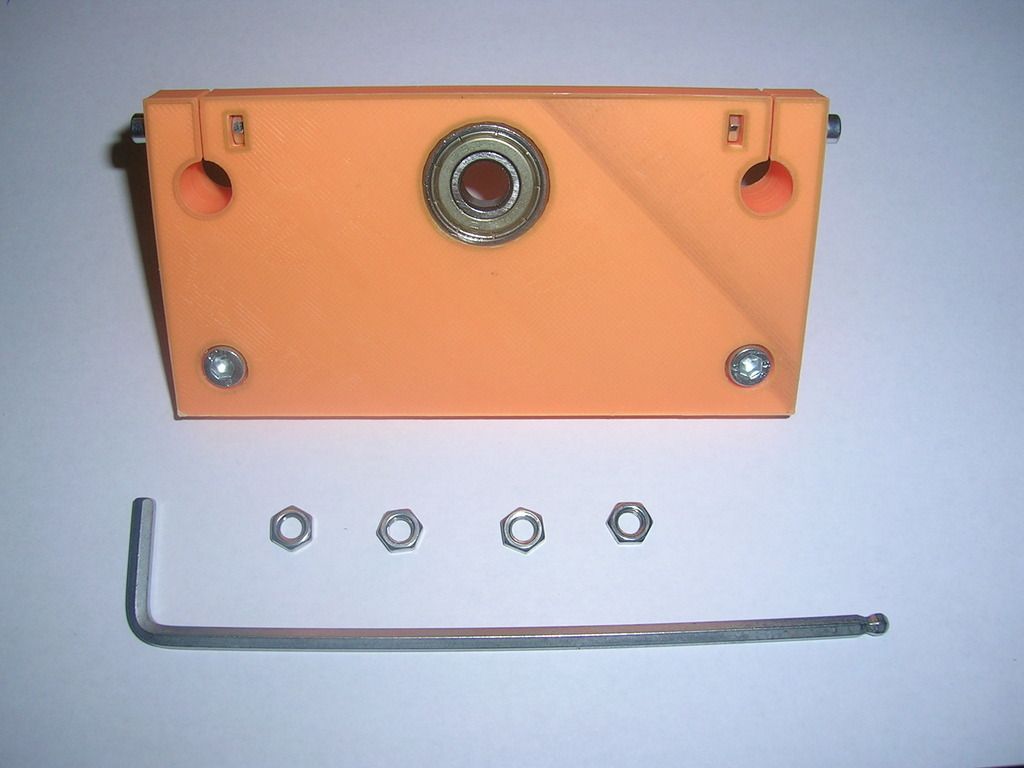



Klein probleem bij de hoeklageringen:
De bestelde bouten M5x60 zijn te lang, inkorten is geen optie. Morgen op het werk even scharrelen naar M5x50 met 30mm draad. Verder dienen de lager buitenschalen strak tegen elkaar aan te liggen. De draad loopt straks in het spleetje tussen de 2 lagers in. Er steekt echter een stukje afdichting aan de zijkant uit, waardoor de lagers niet strak tegen elkaar aanliggen. (Op de foto niet zichtbaar) Hopelijk kan ik de lagers licht vlakken op de schuurband.
En dan is het een kwestie van in elkaar schroeven/schuiven:
Klein probleem bij de hoeklageringen:
De bestelde bouten M5x60 zijn te lang, inkorten is geen optie. Morgen op het werk even scharrelen naar M5x50 met 30mm draad. Verder dienen de lager buitenschalen strak tegen elkaar aan te liggen. De draad loopt straks in het spleetje tussen de 2 lagers in. Er steekt echter een stukje afdichting aan de zijkant uit, waardoor de lagers niet strak tegen elkaar aanliggen. (Op de foto niet zichtbaar) Hopelijk kan ik de lagers licht vlakken op de schuurband.

De afdichtingen kan je er met een klein schroeven draaiertje er zo uit wippen.
Mocht het niet werken klik je ze ook zo terug.
Misschien een optie voor je
Mocht het niet werken klik je ze ook zo terug.
Misschien een optie voor je
prop-er
Forum veteraan
De afdichtingen kan je er met een klein schroeven draaiertje er zo uit wippen.
Mocht het niet werken klik je ze ook zo terug.
Misschien een optie voor je
Goede tip! Ik maakte me zorgen over de metaaldeeltjes die tijdens het vlakken in het lager zouden kunnen komen. Eenvoudigweg de afdichting verwijderen is een prima oplossing! Aangezien de lagers straks tegen elkaar zitten, is de binnenste afdichting toch niet nodig.
prop-er
Forum veteraan
Het schiet al lekker op! Wat een ontzettend gaaf ding om te bouwen, en wat zit het goed doordacht in elkaar! De kwaliteit van de 3D prints is echt uitmuntend. Ik zit er echt van te genieten, en het is tevens een mooie benchmark.
Eigenlijk spreekt alles tijdens de bouw voor zich, en als ik twijfel check ik even de foto's of video's van het origineel.
Morgen de Z-as even afbouwen, en kabeltrekken.



Eigenlijk spreekt alles tijdens de bouw voor zich, en als ik twijfel check ik even de foto's of video's van het origineel.
Morgen de Z-as even afbouwen, en kabeltrekken.
prop-er
Forum veteraan
Nu ik bijna zover ben om de lijntjes te spannen, even wat meer info over Core XY.
De kern van deze aansturing is dat de stappenmotoren vast aan het frame gemonteerd zitten, en er een snaar/riem/lijn aanwezig is. Dat heeft voordelen, want hierdoor wordt de bewegende massa verminderd, en er is minder gedoe met bewegende elektrische aansluitingen.
Als je zelf begint te schetsen achterop een bierviltje om een X en Y-as op deze wijze met draad aan te sturen, kom je waarschijnlijk hier op uit:

1 Doorlopende lijn op 2 stationaire motoren. Als 1 motor wordt aangedreven, beweegt de printkop onder 45°. Door te spelen met verschillen in snelheid/draairichting van beide motoren, bereik je de gewenste koers / positie.
Maar er is een nadeel aan deze constructie. Bij het snel of krachtig verschuiven van de printkop in de X-richting komen op beide Y-assen krachten in verschillende richtingen te staan, waardoor "binding" (plakken) van de geleiding kan ontstaan. Je kunt dit effect hier heel goed waarnemen vanaf 35 seconden:
Als je goed kijkt, zie je op de Y-assen (vertikaal) een kleine beweging als de X-as (horizontaal) snel heen en weer wordt bewogen.
Om dit probleem op te lossen bedacht het MIT een inventieve oplossing genaamd Core XY:

Door een kleine aanpassing in de lay-out, heffen bij beweging in de X-richting de krachten in de Y-richting elkaar op, waardoor zich geen vervelende neven bewegingen meer voordoen. Een groot voordeel!
Bron schema's: A Core-XY Implementation
De kern van deze aansturing is dat de stappenmotoren vast aan het frame gemonteerd zitten, en er een snaar/riem/lijn aanwezig is. Dat heeft voordelen, want hierdoor wordt de bewegende massa verminderd, en er is minder gedoe met bewegende elektrische aansluitingen.
Als je zelf begint te schetsen achterop een bierviltje om een X en Y-as op deze wijze met draad aan te sturen, kom je waarschijnlijk hier op uit:
1 Doorlopende lijn op 2 stationaire motoren. Als 1 motor wordt aangedreven, beweegt de printkop onder 45°. Door te spelen met verschillen in snelheid/draairichting van beide motoren, bereik je de gewenste koers / positie.
Maar er is een nadeel aan deze constructie. Bij het snel of krachtig verschuiven van de printkop in de X-richting komen op beide Y-assen krachten in verschillende richtingen te staan, waardoor "binding" (plakken) van de geleiding kan ontstaan. Je kunt dit effect hier heel goed waarnemen vanaf 35 seconden:
Als je goed kijkt, zie je op de Y-assen (vertikaal) een kleine beweging als de X-as (horizontaal) snel heen en weer wordt bewogen.
Om dit probleem op te lossen bedacht het MIT een inventieve oplossing genaamd Core XY:
Door een kleine aanpassing in de lay-out, heffen bij beweging in de X-richting de krachten in de Y-richting elkaar op, waardoor zich geen vervelende neven bewegingen meer voordoen. Een groot voordeel!
Bron schema's: A Core-XY Implementation
Laatst bewerkt door een moderator:
prop-er
Forum veteraan
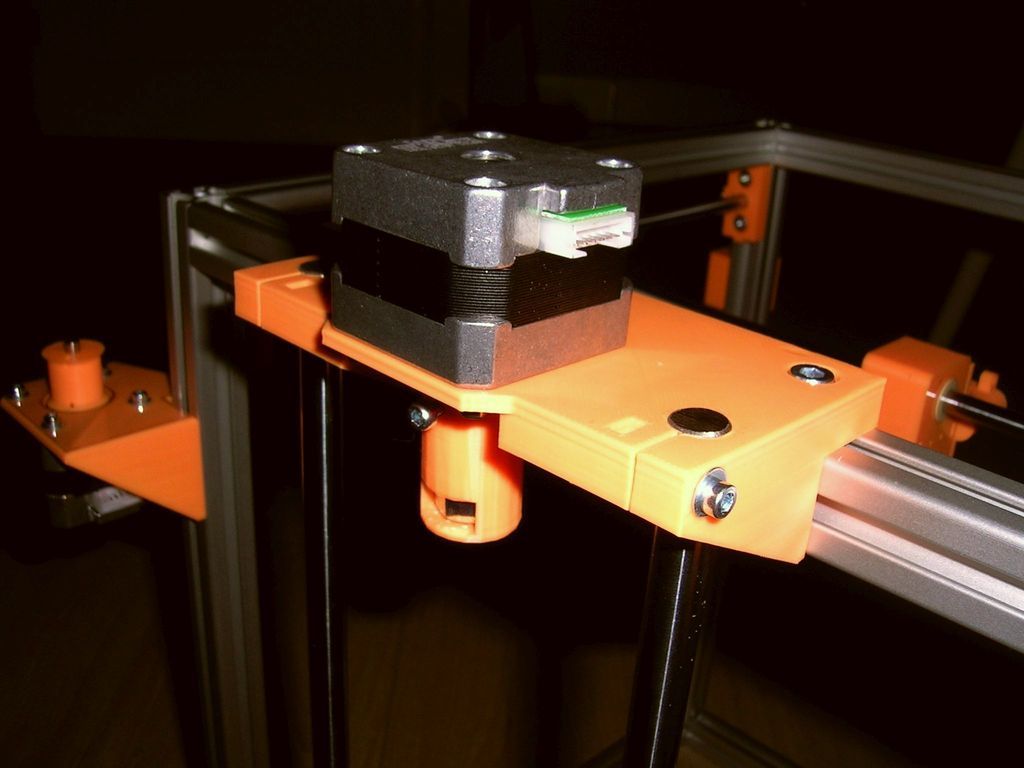
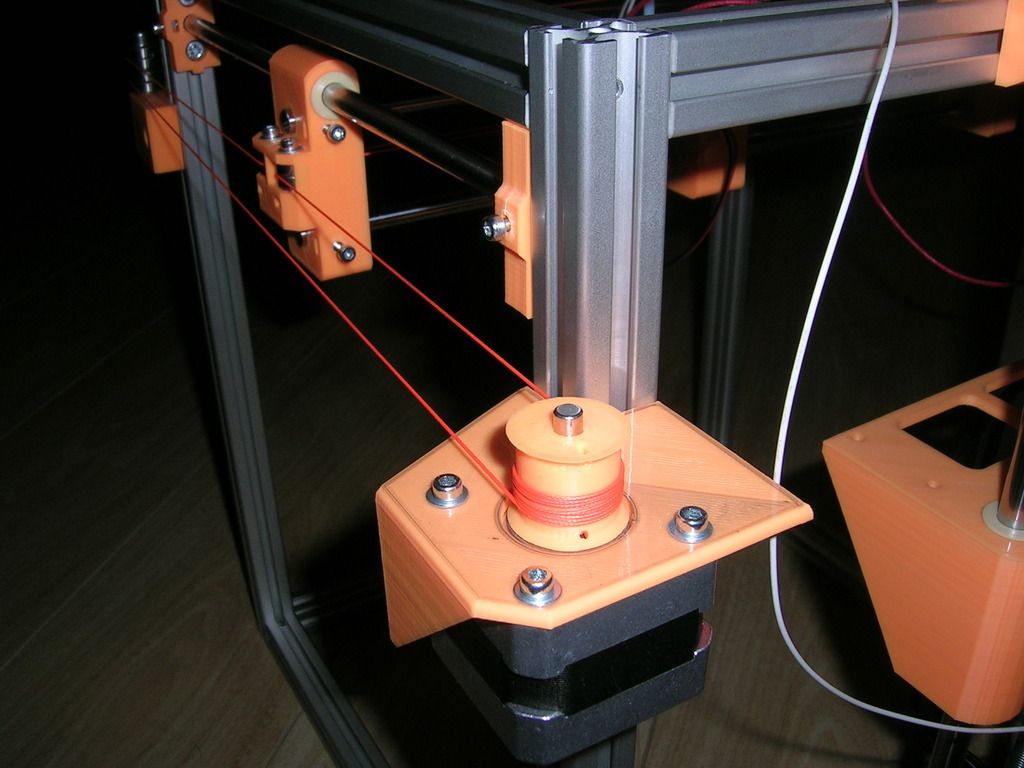
Weer wat verder gekomen.
Eerst de X en Y assen mechanisch geblokkeerd met lijmtangen. Daarna de lijnen gespannen. Dit ging eigenlijk zonder noemenswaardige problemen. Er zit flink spanning op de lijn. Als je hem "plinkt", hoor je een toon.
Door nu aan de assen van de stappenmotoren te draaien, is de printkop te bewegen. Dat voelt allemaal strak aan.
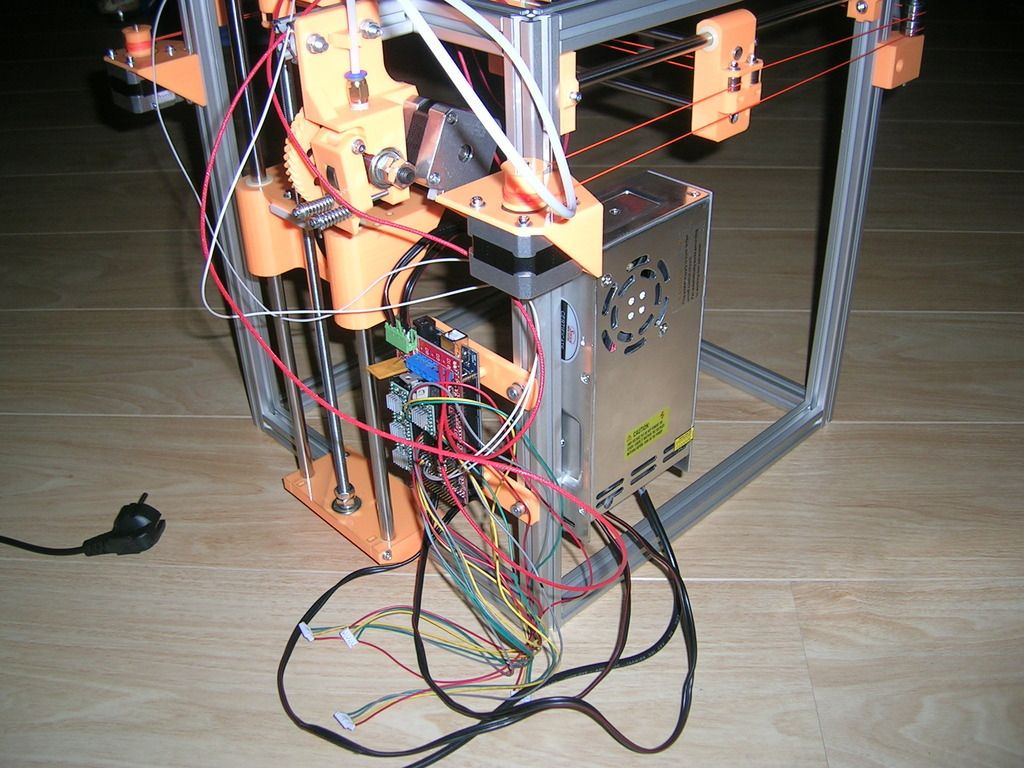
Verder nog de printkop en blower gemonteerd, het printplateau voorzien van carbonfolie, De lagering van de Z-as nog iets verbeterd, de extruder afgebouwd en gemonteerd, en de printplaten en voeding een plekje gegeven.
Van de week eerst de bekabeling inkorten en ordenen, en voorzichtig wat gaan testen!
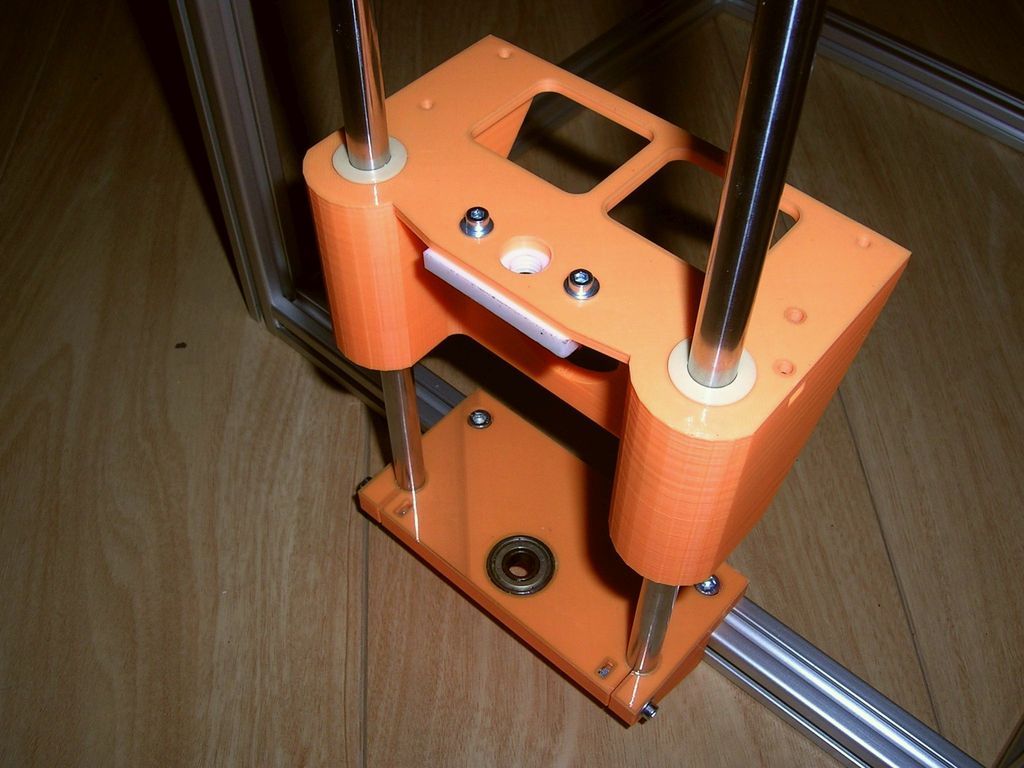
Wat klopt hier niet?
Eerst de X en Y assen mechanisch geblokkeerd met lijmtangen. Daarna de lijnen gespannen. Dit ging eigenlijk zonder noemenswaardige problemen. Er zit flink spanning op de lijn. Als je hem "plinkt", hoor je een toon.
Door nu aan de assen van de stappenmotoren te draaien, is de printkop te bewegen. Dat voelt allemaal strak aan.
Verder nog de printkop en blower gemonteerd, het printplateau voorzien van carbonfolie, De lagering van de Z-as nog iets verbeterd, de extruder afgebouwd en gemonteerd, en de printplaten en voeding een plekje gegeven.
Van de week eerst de bekabeling inkorten en ordenen, en voorzichtig wat gaan testen!
Wat klopt hier niet?
DirkSchipper
Forum veteraan
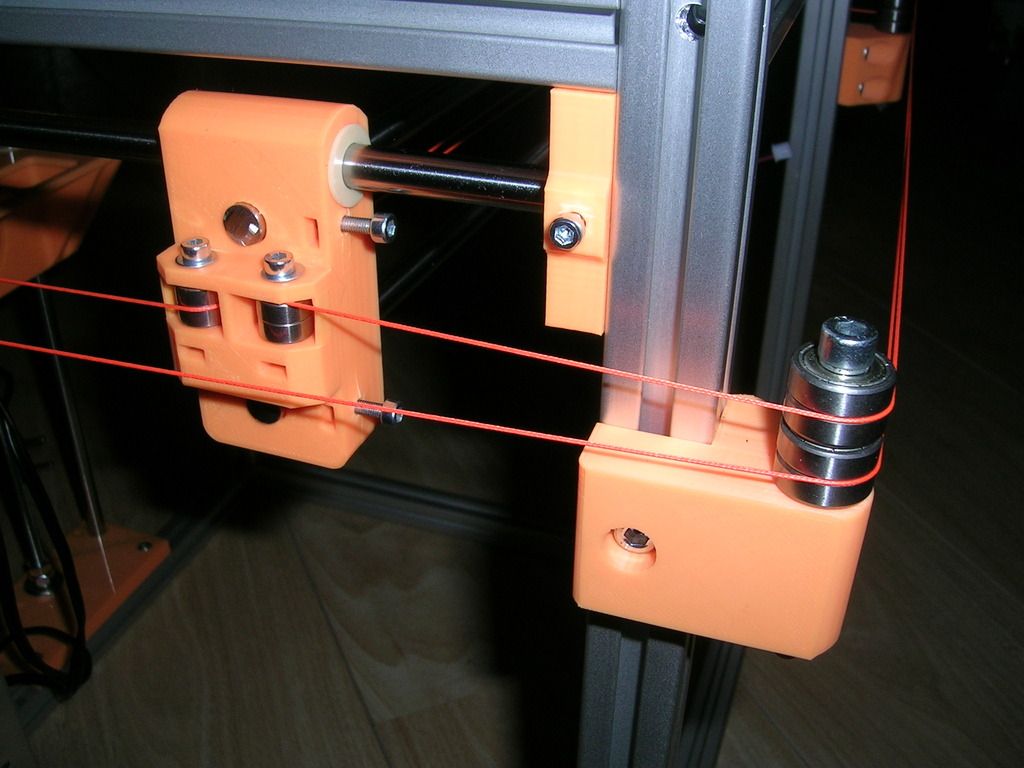
Wat klopt hier niet?
Draadje uit de groef gelopen. Waarom? eraf geschoten toen er nog geen/weinig spanning op de draad stond (en niet opgemerkt) of tijdens het proefbewegen?
Heb je nog genoeg lengte om het op de lossen, of moet het hele draadje vervangen worden.
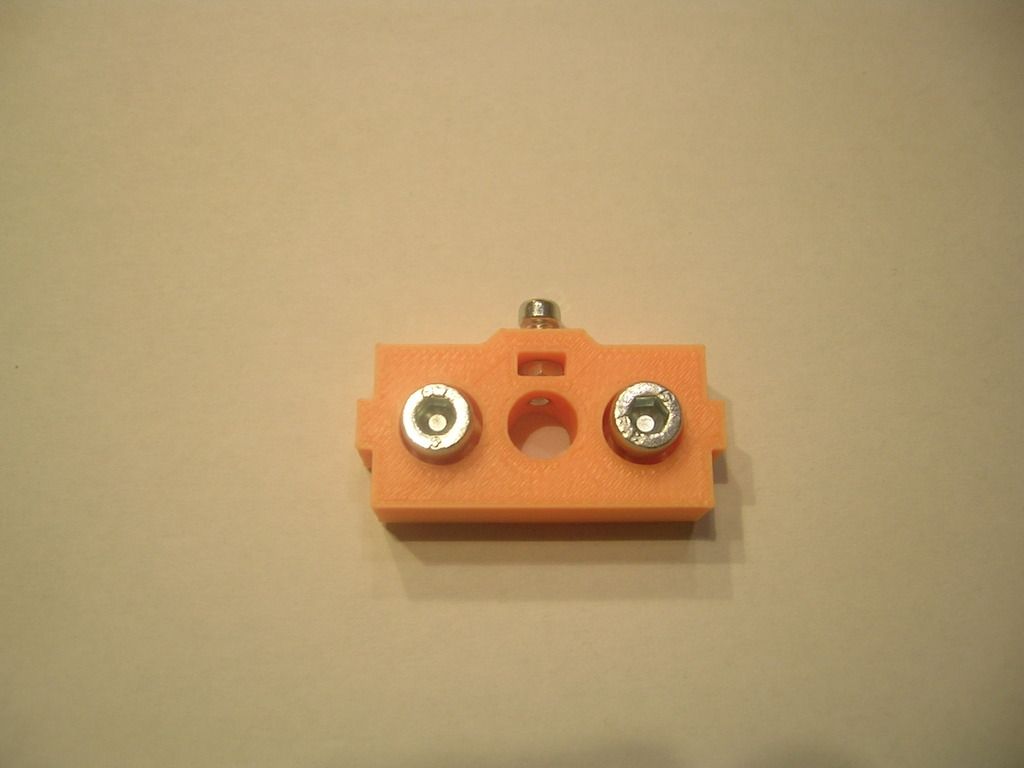
Wat me eigenlijk meer opvalt (verbaast), zijn die drie niet aangedraaide bouten. Eentje verstopt achter de onderste draad, ee een cm of vijf daarboven, en de derde vlak tegen het frame aan. instelbaar voor eindsensors oid.?
prop-er
Forum veteraan
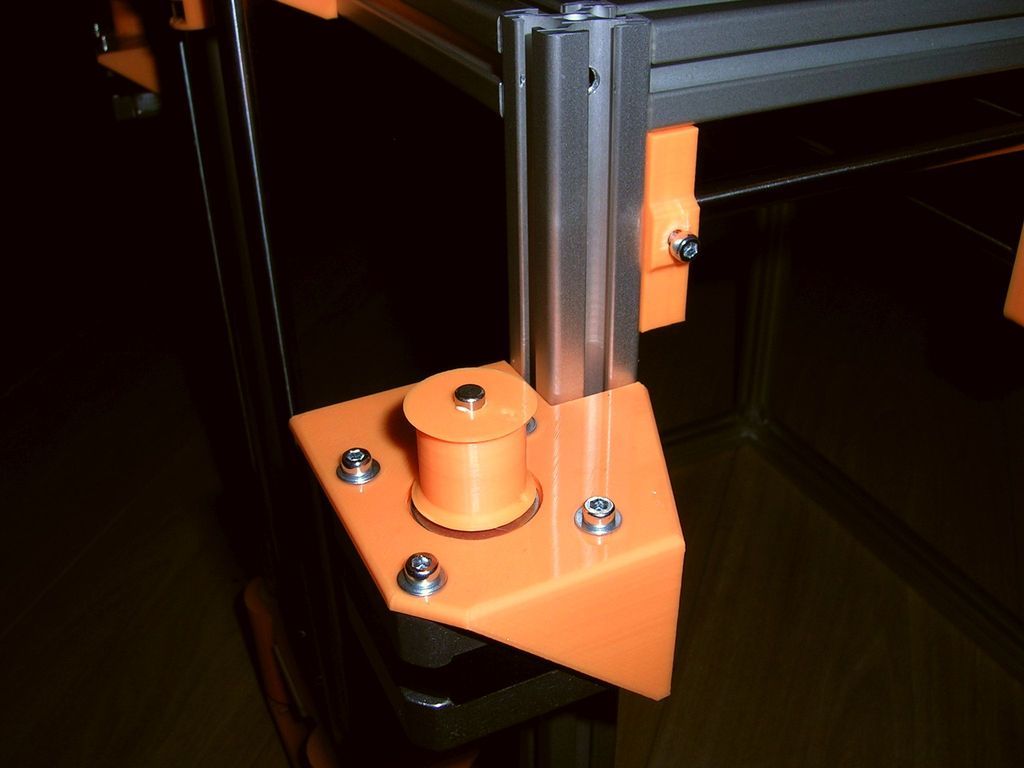
Geen idee, Dirk, ik zag het pas op de foto! Maar dit is snel opgelost. Er zit circa 30cm overlengte draad aan de achterzijde van de printkop, netjes opgerold. Hiermee is het altijd mogelijk de boel na te spannen.
Deze drie bouten houden de X en Y-assen op hun plaats (drukbouten). In het 3D geprinte onderdeel zit een kamertje waar een M3 moer in past. Dat kun je op deze foto niet zien. Deze bouten zitten wel degelijk vast.
Ze staan wel op het lijstje om te worden vervangen door iets kortere stelschroeven met kraterpunt.
Deze drie bouten houden de X en Y-assen op hun plaats (drukbouten). In het 3D geprinte onderdeel zit een kamertje waar een M3 moer in past. Dat kun je op deze foto niet zien. Deze bouten zitten wel degelijk vast.
Ze staan wel op het lijstje om te worden vervangen door iets kortere stelschroeven met kraterpunt.