Weer even een kleine update.
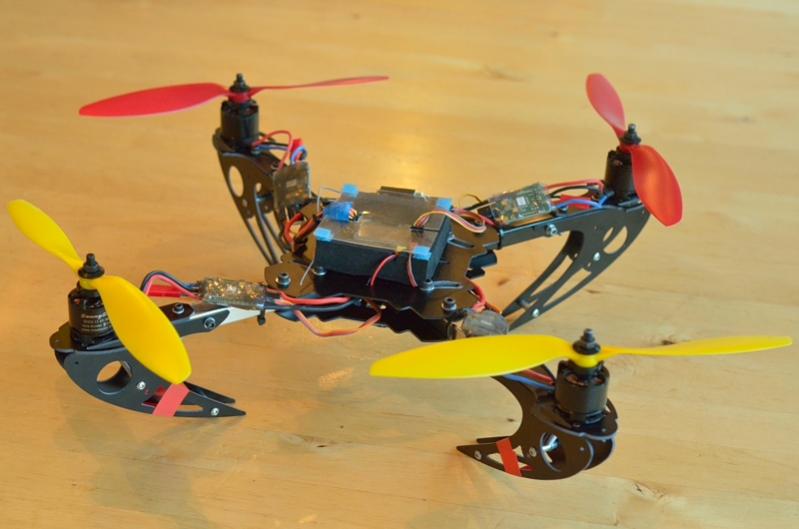
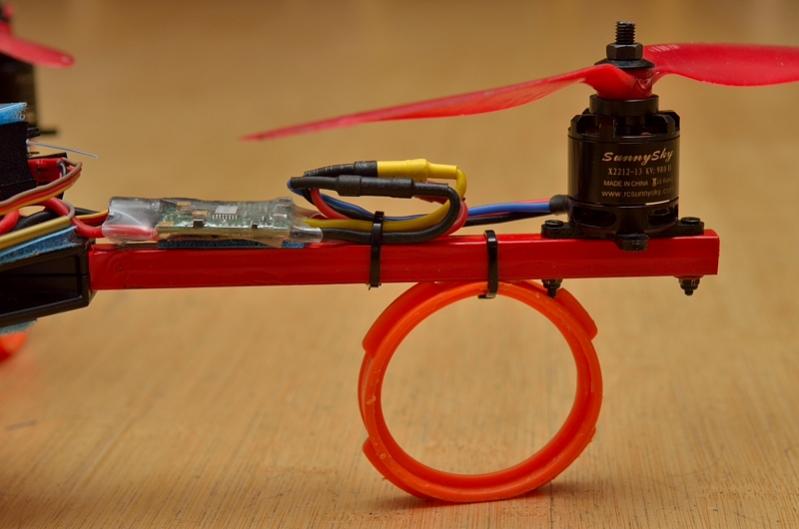
Zoals hierboven al vermeld heb ik de motoren nu met boutjes vastzitten.

Verder heb ik de achter-armen met rood oracover bespannen voor het vergroten van orientatie herkenning tijdens LOS vliegen.
Ik merk dat ik bij snellere rondjes vliegen soms wat verder weg zit en dan is het ongelooflijk moeilijk te herkennen wat voor en achter is.
In het donker gaat dat nog wel door de witte en rode leds, maar overdag blijft het lastig.
Dat is ook een beetje mijn drempel met acro-mode. Kan er prima in hoveren en vlak voor me wat heen en weer en bochtjes draaien, maar ben als de dood dat bij verder weg ik de orientatie kwijt raak en dan niet meer weet of ik m rechter stuur of juist schuiner.
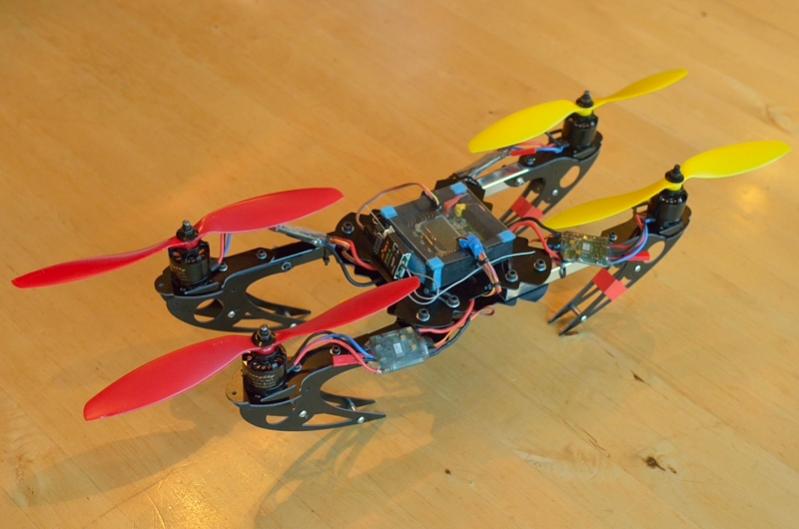
Zoals hierboven al vermeld heb ik de motoren nu met boutjes vastzitten.
Verder heb ik de achter-armen met rood oracover bespannen voor het vergroten van orientatie herkenning tijdens LOS vliegen.
Ik merk dat ik bij snellere rondjes vliegen soms wat verder weg zit en dan is het ongelooflijk moeilijk te herkennen wat voor en achter is.
In het donker gaat dat nog wel door de witte en rode leds, maar overdag blijft het lastig.
Dat is ook een beetje mijn drempel met acro-mode. Kan er prima in hoveren en vlak voor me wat heen en weer en bochtjes draaien, maar ben als de dood dat bij verder weg ik de orientatie kwijt raak en dan niet meer weet of ik m rechter stuur of juist schuiner.
Laatst bewerkt door een moderator:
")
 waardoor ik m nog kleiner kan opvouwen:
waardoor ik m nog kleiner kan opvouwen: