Met
simple gov bedoel je
fixed endpoints?
Low gov en
high gov hebben te maken met je toerental. Je gearing is normaal gesproken vast. Als je daarmee een wat lager toerental wilt dan pak je
low gov. Dit zorgt ervoor dat de regelaar weet dat hij niet heel veel toeren hoeft te leveren en dus zelf wat hoger in de (figuurlijke) 'throttle curve' gaat zitten voor een betere efficientie. Als je meer toeren wilt dan moet je naar
high gov over schakelen aangezien de regelaar anders die toeren niet kan leveren. Het mooiste is als je een Eagletree of iets dergelijks hebt, dan kun je zo zien hoeveel toeren die draait in elke mode.
In
set rpm hoef je helemaal niet met die waardes bezig te zijn. Je vult gewoon je toerental in, zet je throttlecurves flat op 25%, 75% en 100% en zo kun je kiezen tussen die 3 toerentallen.
Die autorotatieoptie heb ik ook uit. Het zorgt ervoor dat als een autorotatie mis gaat je niet opnieuw door de slowstart gaat maar je direct vol vermogen hebt. Ik had het probleem daarmee dat ik altijd met de stick onderin optoer en dat is juist het gebied waar die optie actief is. Met gevolg dat het optoeren niet altijd vlekkeloos liep waardoor de heli draaide waardoor de V-bar in de war raakt en dan stijg ik liever niet meer op
")
Ik heb die autorotatie optie dus uit en de
initial motor startup power op low gezet. Anders draaide de heli ook tijdens het optoeren. Verder draait alles hier nu perfect.
Gemiddeld zo'n 12A continu tijdens een hoover op 2000rpm, niet slecht

Verder een vliegtijd van ruim 10 minuten, gaat misschien wat omlaag als het weer wat beter is en ik weer op het veld kan gaan vliegen. Dit dus op een 12S V-bar T-rex 600.
 .Dus alles is goed gegaan met inregelen. Ben benieuwd komende zomer wat hij in je nieuwe setting/heli gaat doen.
.Dus alles is goed gegaan met inregelen. Ben benieuwd komende zomer wat hij in je nieuwe setting/heli gaat doen.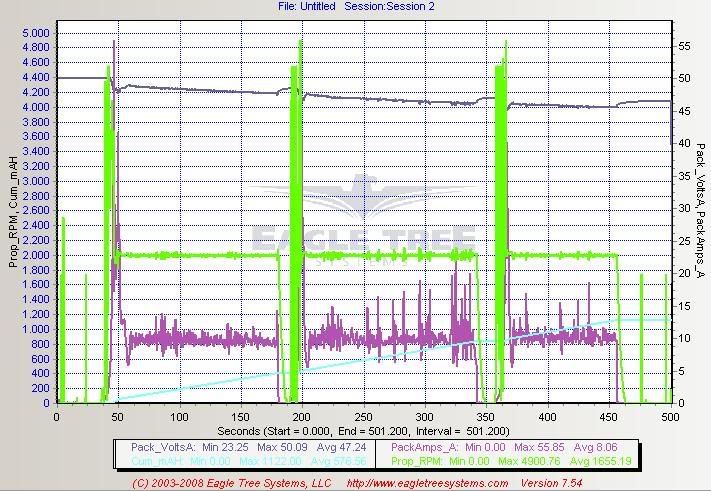
")