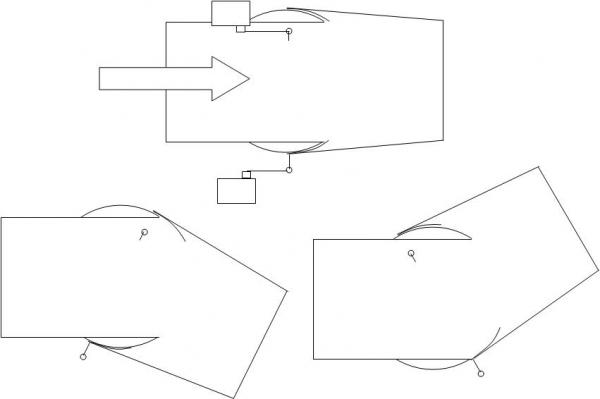
Op deze site van rcgroups heeft iemand ook een leuk systeem voor de thrust vectoring
gemaakt. De aansturing d.m.v. de servo's kan denk ik naar smaak aangepast worden.
b.v. de taileron en de rudder zoals serge pot al aangeeft.
http://www.rcgroups.com/forums/attachment.php?attachmentid=1418031
gemaakt. De aansturing d.m.v. de servo's kan denk ik naar smaak aangepast worden.
b.v. de taileron en de rudder zoals serge pot al aangeeft.
http://www.rcgroups.com/forums/attachment.php?attachmentid=1418031
Laatst bewerkt:


") dat ik daar niet eerder opgekomen ben!
dat ik daar niet eerder opgekomen ben!