Beste mensen,
Ik volg dit forum al een tijdje. Na veel gelezen te hebben ben ik zelf begonnen met een quadcopter.
In eerste instantie wilde ik proberen om zelf een controller te ontwerpen/programmeren, maar dat bleek toch tegen te vallen.
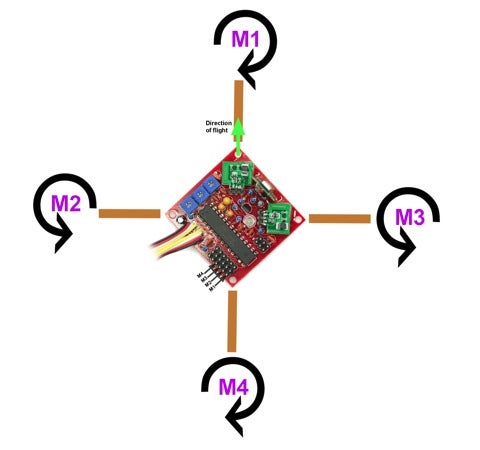
Op het moment probeer ik een kkmulticopter blackboard versie 5.5 aan de gang te krijgen, maar dit wil nog niet echt lukken. Ik heb alles aangesloten, maar ik twijfel over mijn zender. Ik heb een 6-kanaals zender van HobbyKing (HobbyKing R/C Hobby Store : Hobby King 2.4Ghz 6Ch Tx & Rx V2 (Mode 1)).
Hoe dan ook. Ik krijg het nog niet voor elkaar om de quadcopter te "armen". Op sommige momenten krijg ik dit "per ongeluk" wel voor elkaar, dan draaien alle motoren en reageren ze ook op de throttle. Maar hoe ik de quadcopter ook houdt, alle motoren blijven even hard draaien. Is er ergens een duidelijk stappenplan om een kkmulticopter te configureren? De handleidingen die ik tegenkom maken niet alles duidelijk voor mij.
Ik hoop dat iemand mij kan helpen. Alvast bedankt!
Ik volg dit forum al een tijdje. Na veel gelezen te hebben ben ik zelf begonnen met een quadcopter.
In eerste instantie wilde ik proberen om zelf een controller te ontwerpen/programmeren, maar dat bleek toch tegen te vallen.
Op het moment probeer ik een kkmulticopter blackboard versie 5.5 aan de gang te krijgen, maar dit wil nog niet echt lukken. Ik heb alles aangesloten, maar ik twijfel over mijn zender. Ik heb een 6-kanaals zender van HobbyKing (HobbyKing R/C Hobby Store : Hobby King 2.4Ghz 6Ch Tx & Rx V2 (Mode 1)).
Hoe dan ook. Ik krijg het nog niet voor elkaar om de quadcopter te "armen". Op sommige momenten krijg ik dit "per ongeluk" wel voor elkaar, dan draaien alle motoren en reageren ze ook op de throttle. Maar hoe ik de quadcopter ook houdt, alle motoren blijven even hard draaien. Is er ergens een duidelijk stappenplan om een kkmulticopter te configureren? De handleidingen die ik tegenkom maken niet alles duidelijk voor mij.
Ik hoop dat iemand mij kan helpen. Alvast bedankt!
")