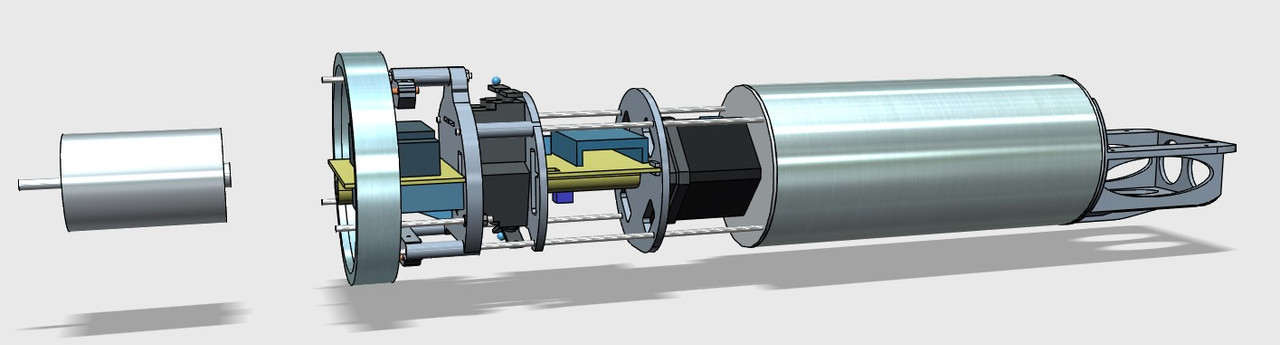
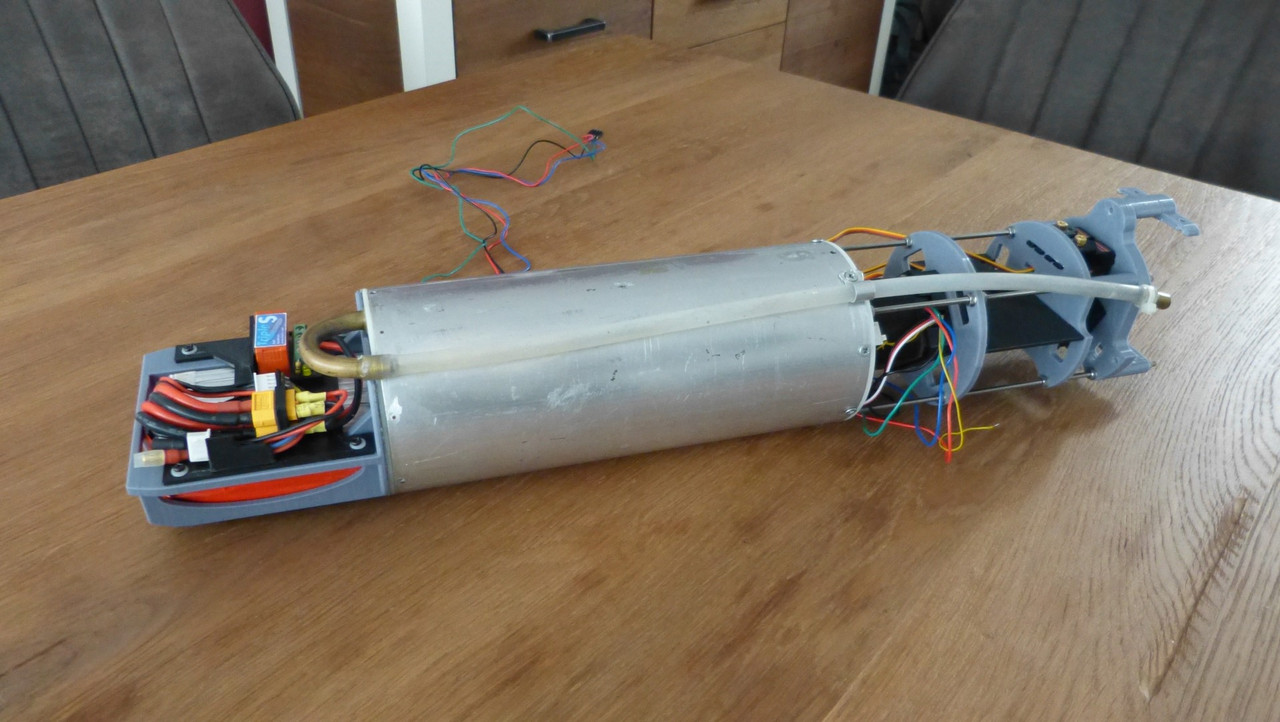
Inmiddels zijn met het techrek flinke stappen gemaakt. Dat is samengebouwd, de elektronica zit er in en werkt.
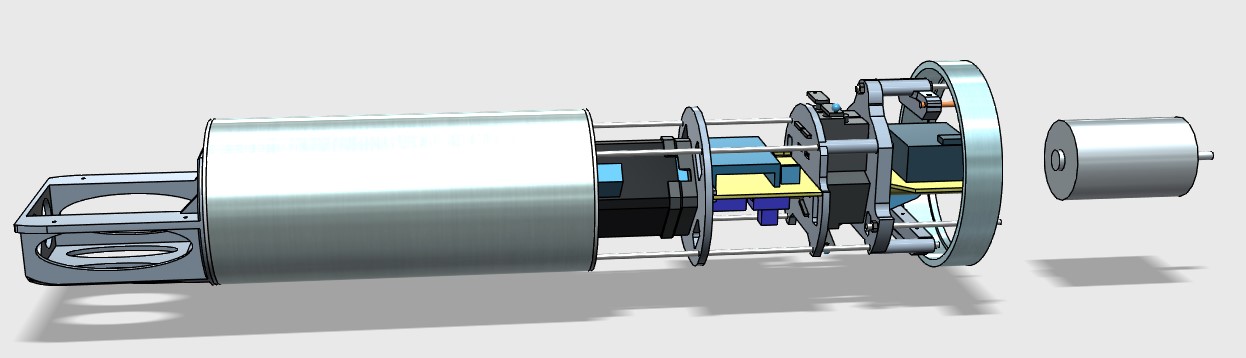
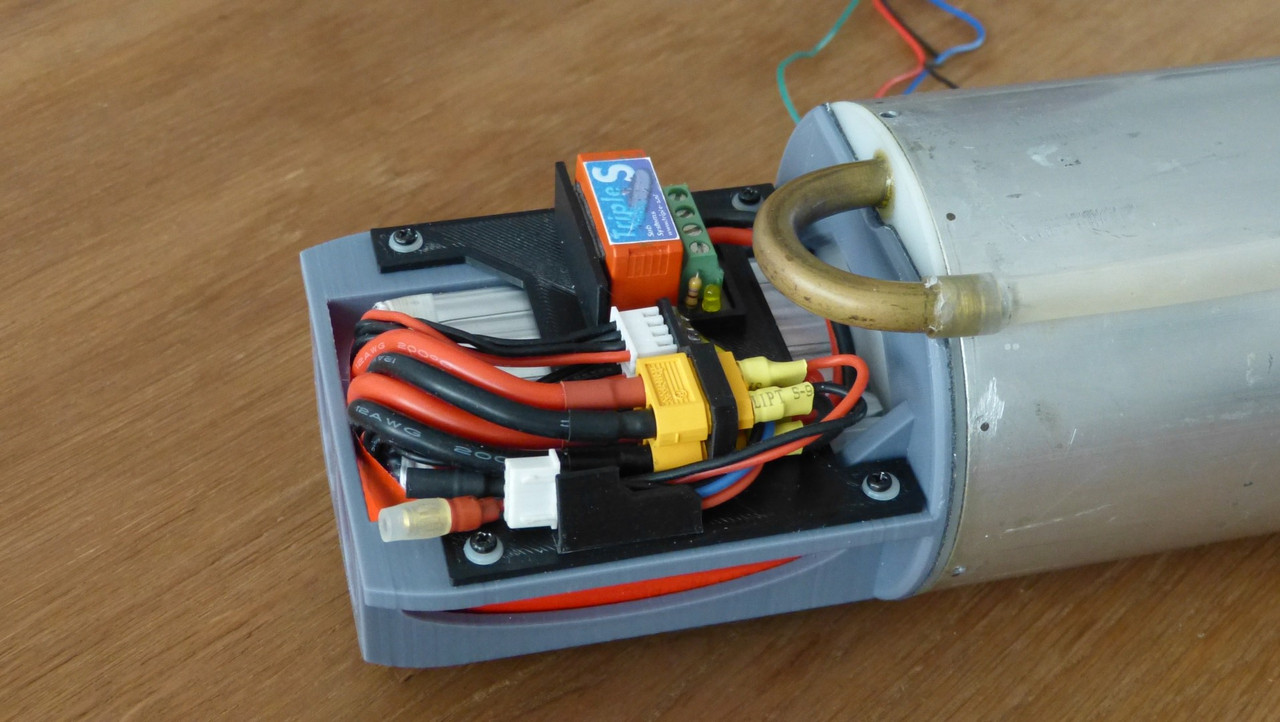
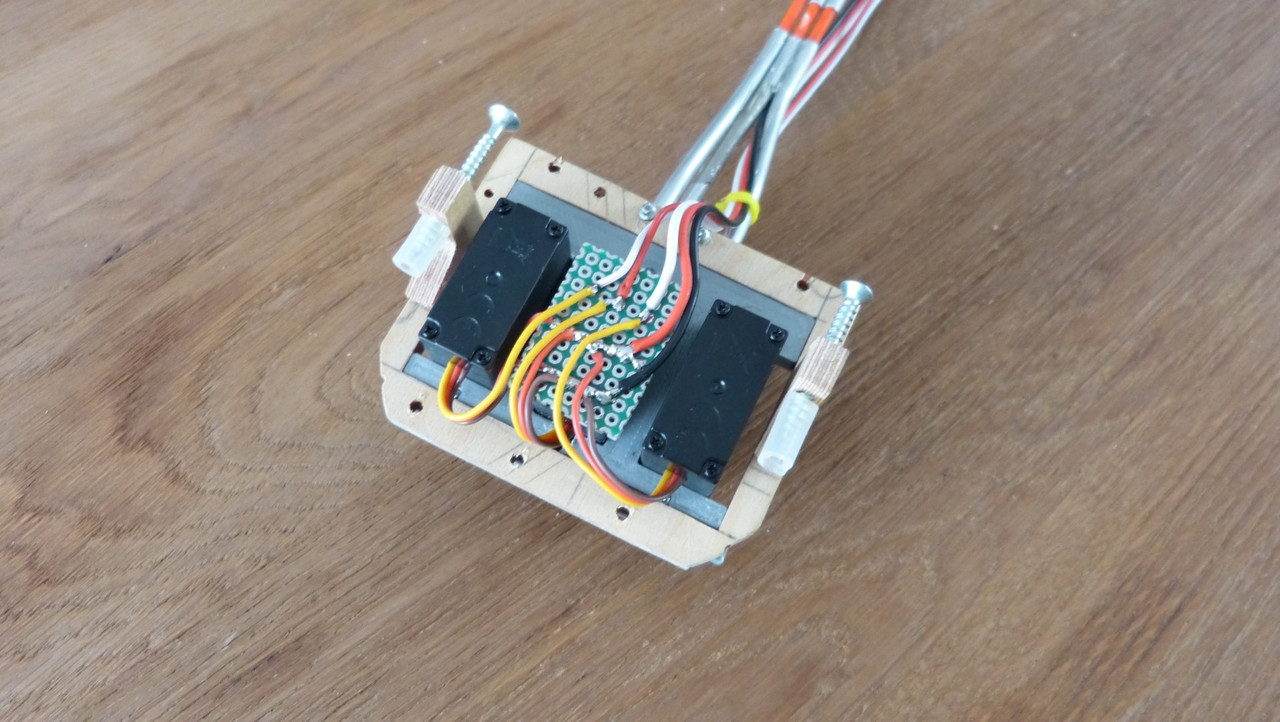
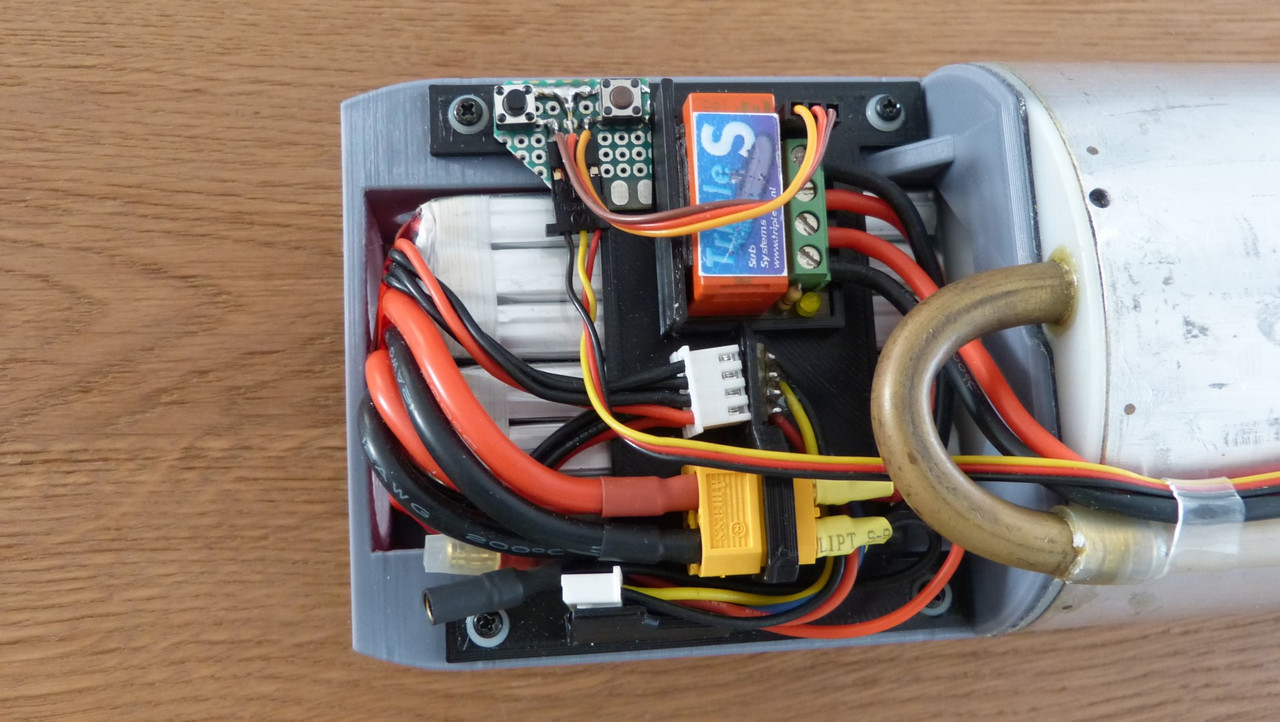
Voorzijde met onder 2x 3S 2200mAh lipo parallel (dus in effect een 3S2P 4400mAh accu), magneet schakelaar en direct aan-uit knopjes
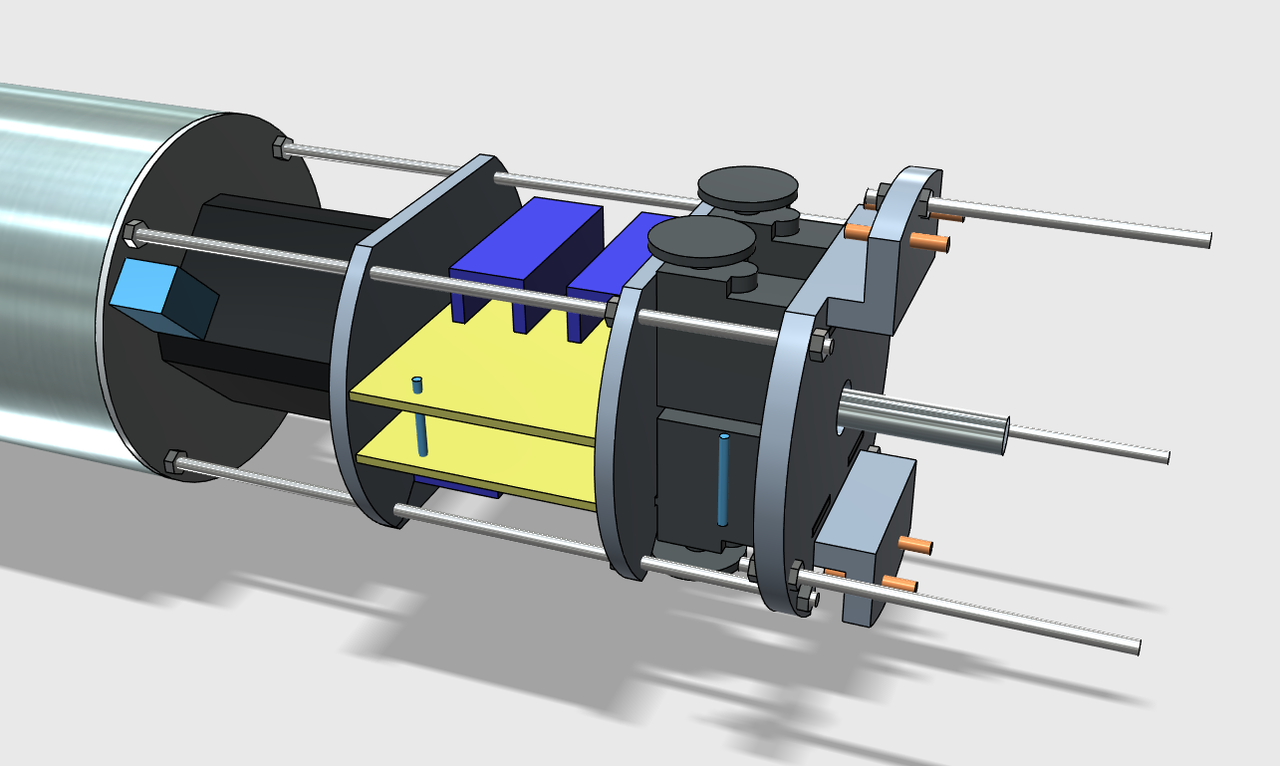
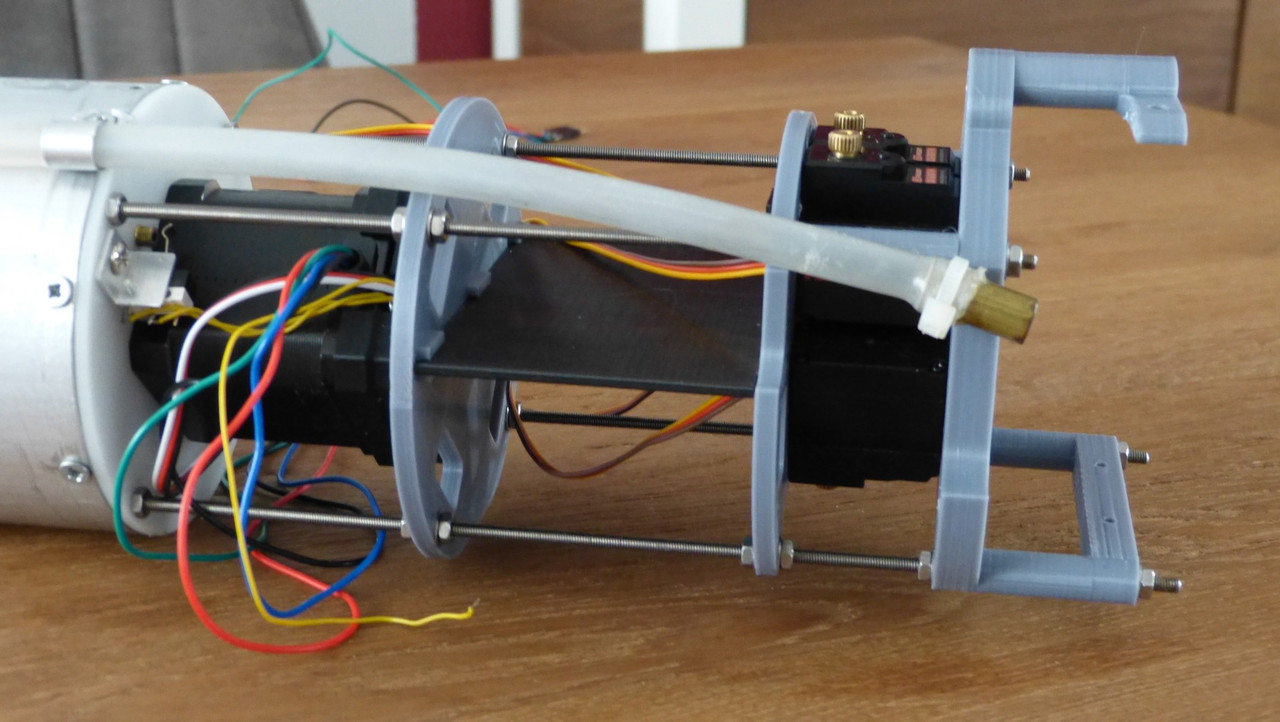
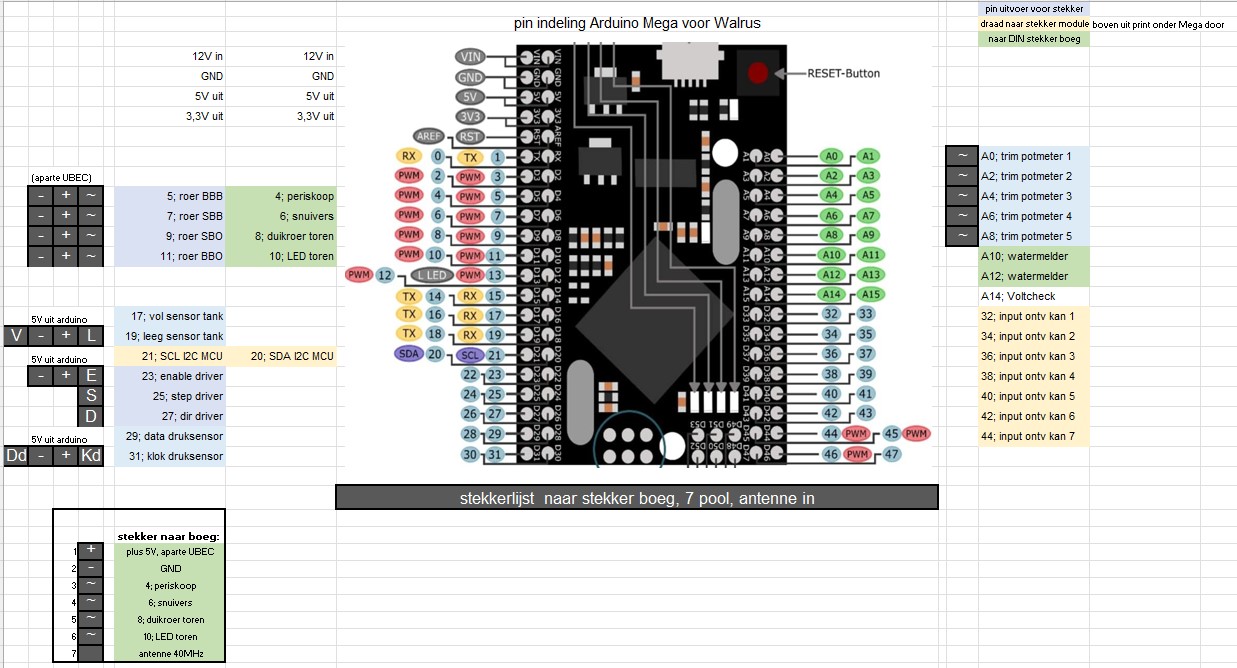
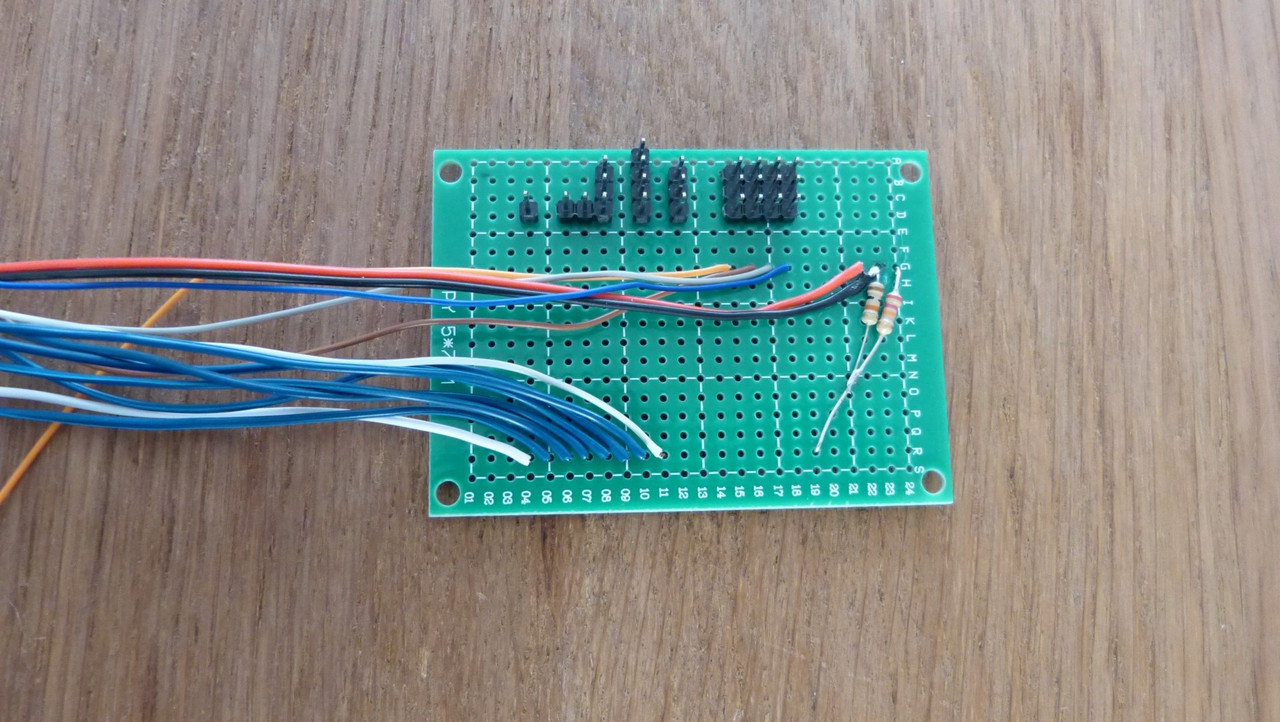
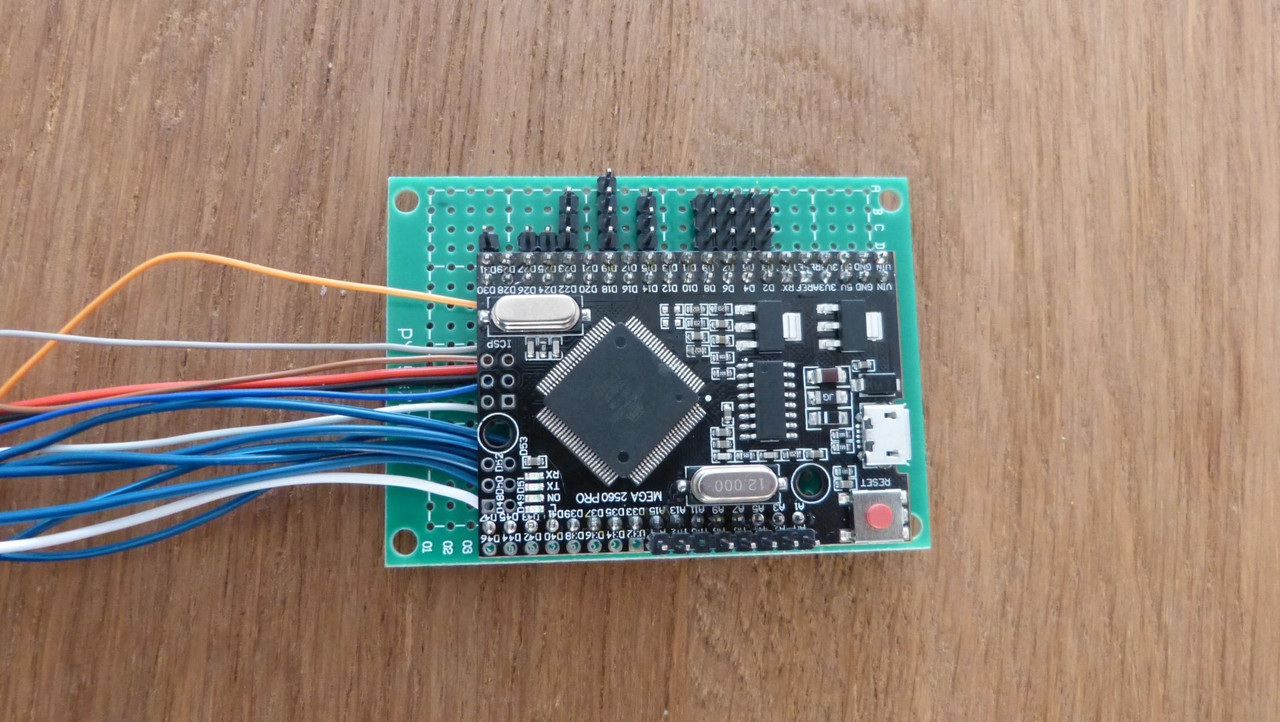
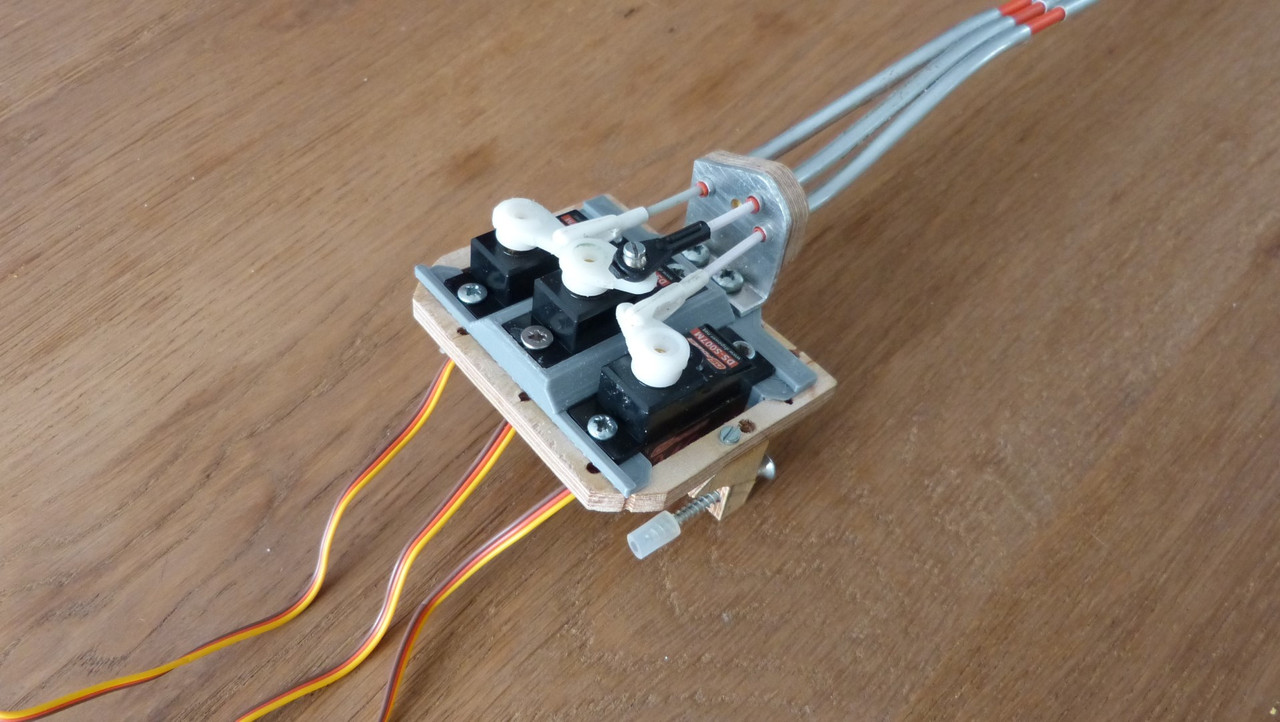
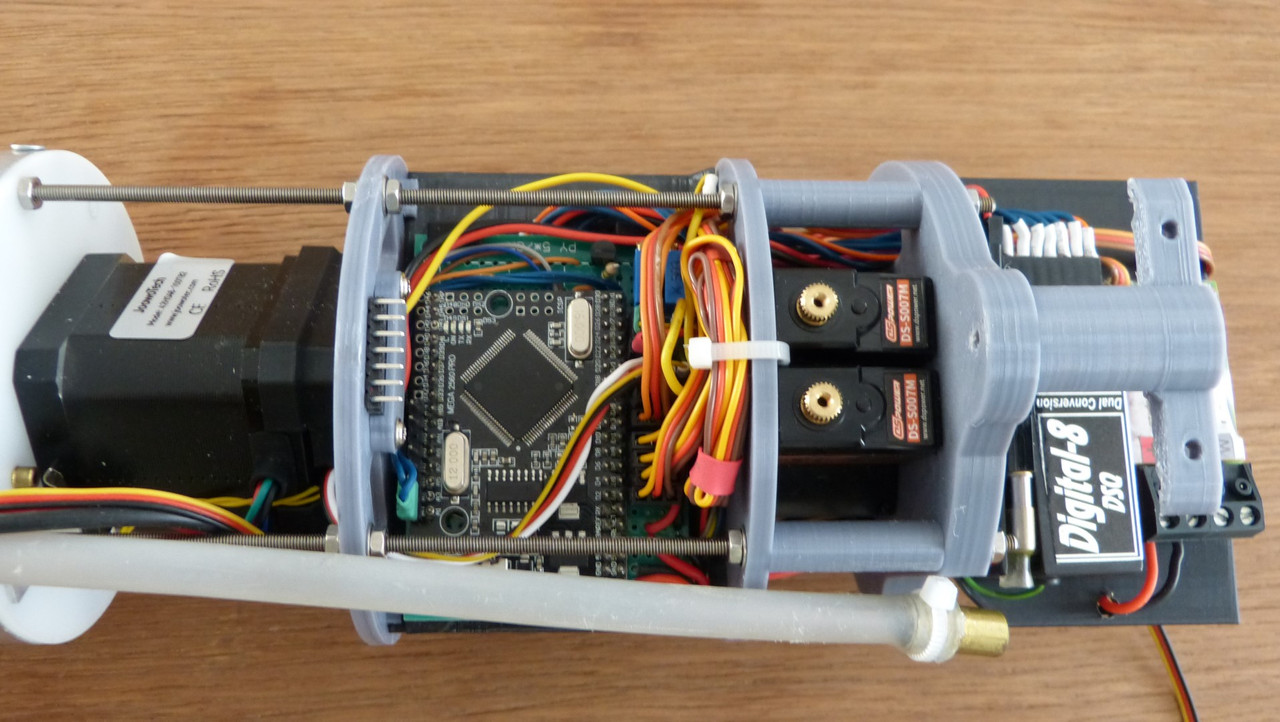
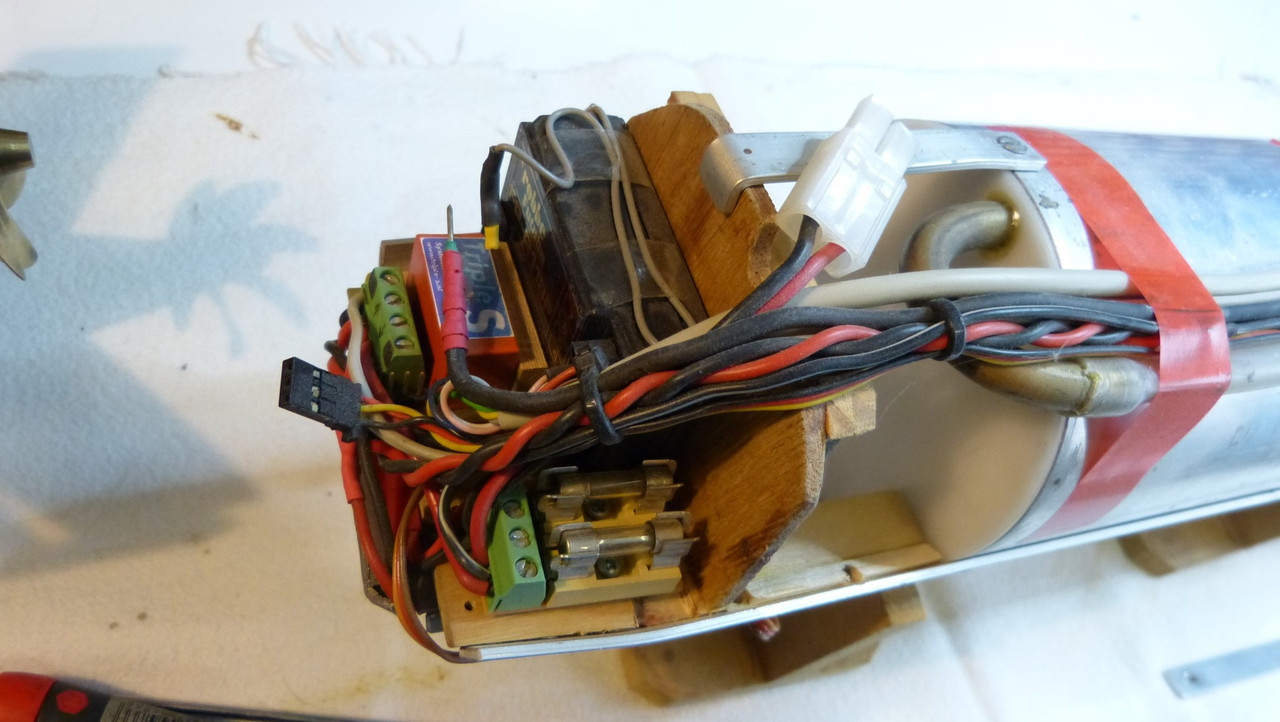
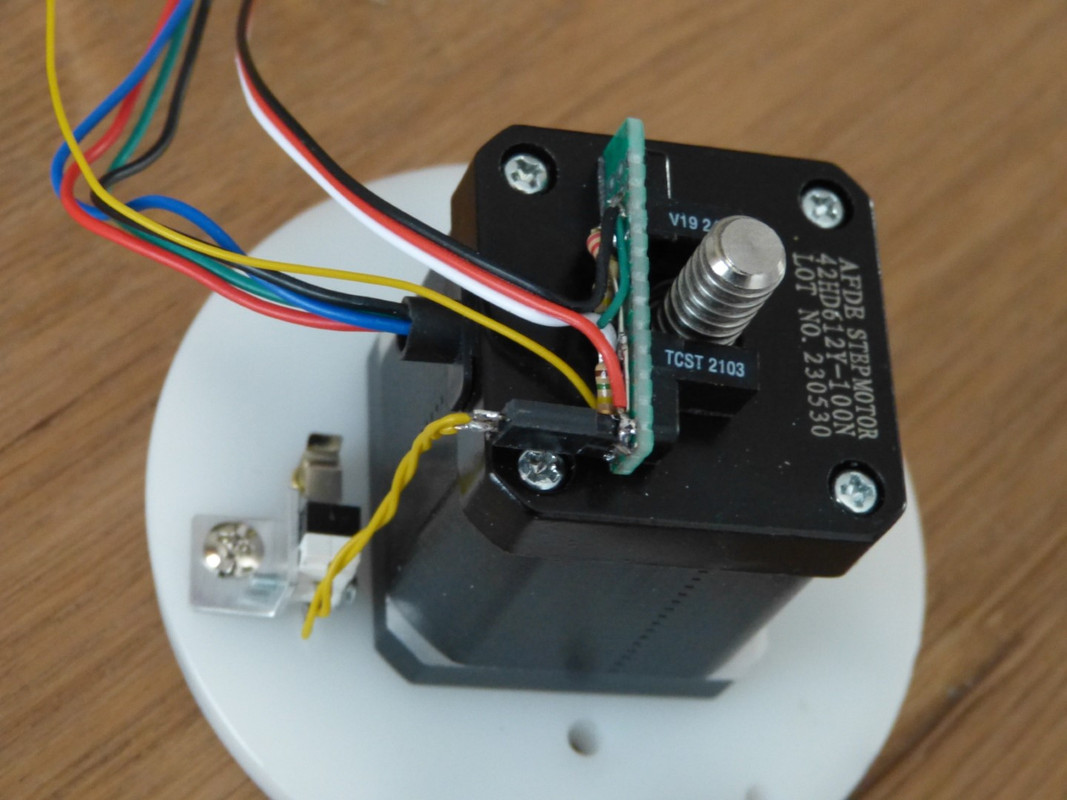
Achter bovenzijde (vvna) steppermotor duiktank, contacten voor bedrading naar boegservo's, Mega Pro Mini, servo's bovenste roeren, ontvanger, ESC
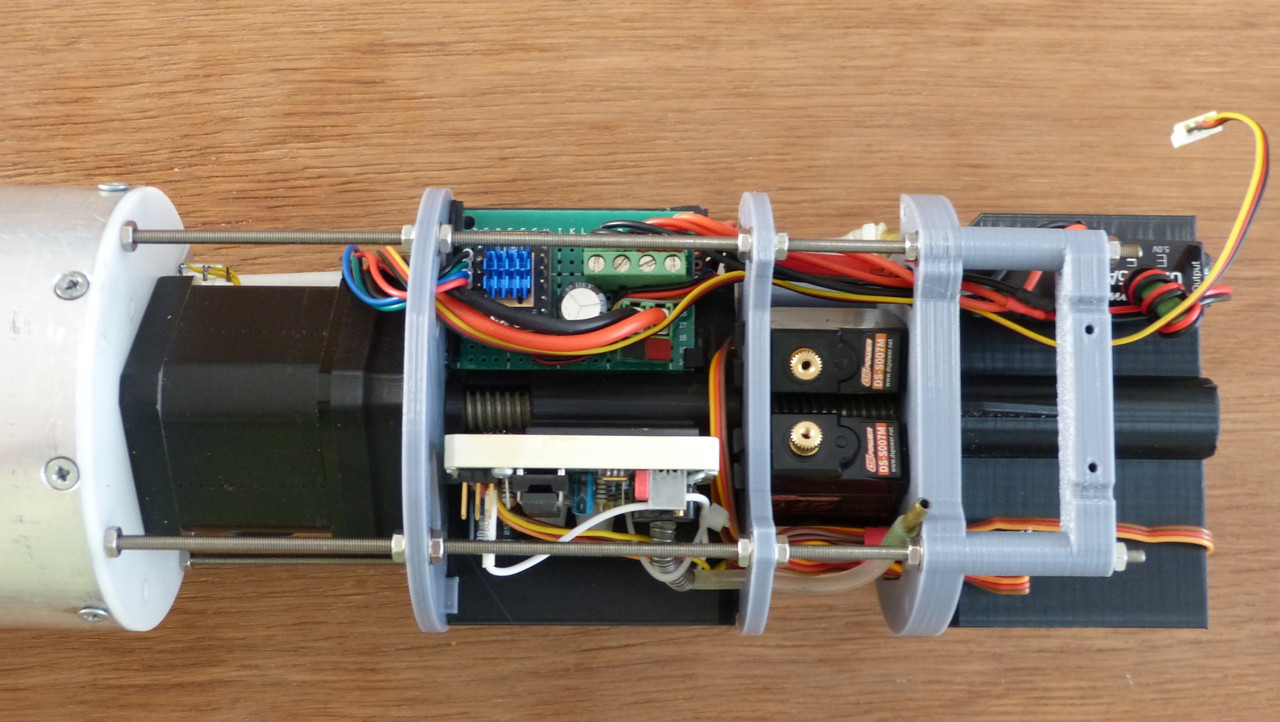
Achter onderzijde (vvna) diezelfde stepper motor, stepperdriver met stroom verdeelpunt, Norbert's LTR5, servo's onderste roeren, UBEC voor stroomvoorziening servo's, en nog veel plek over
")
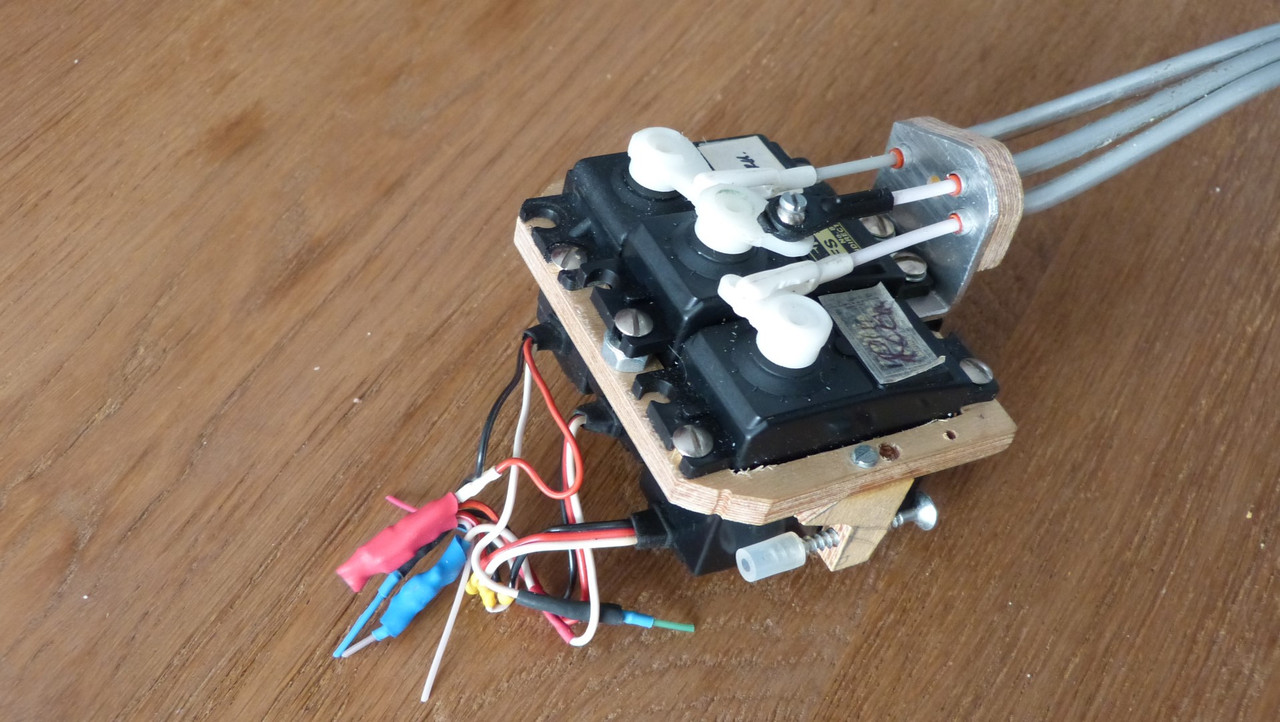
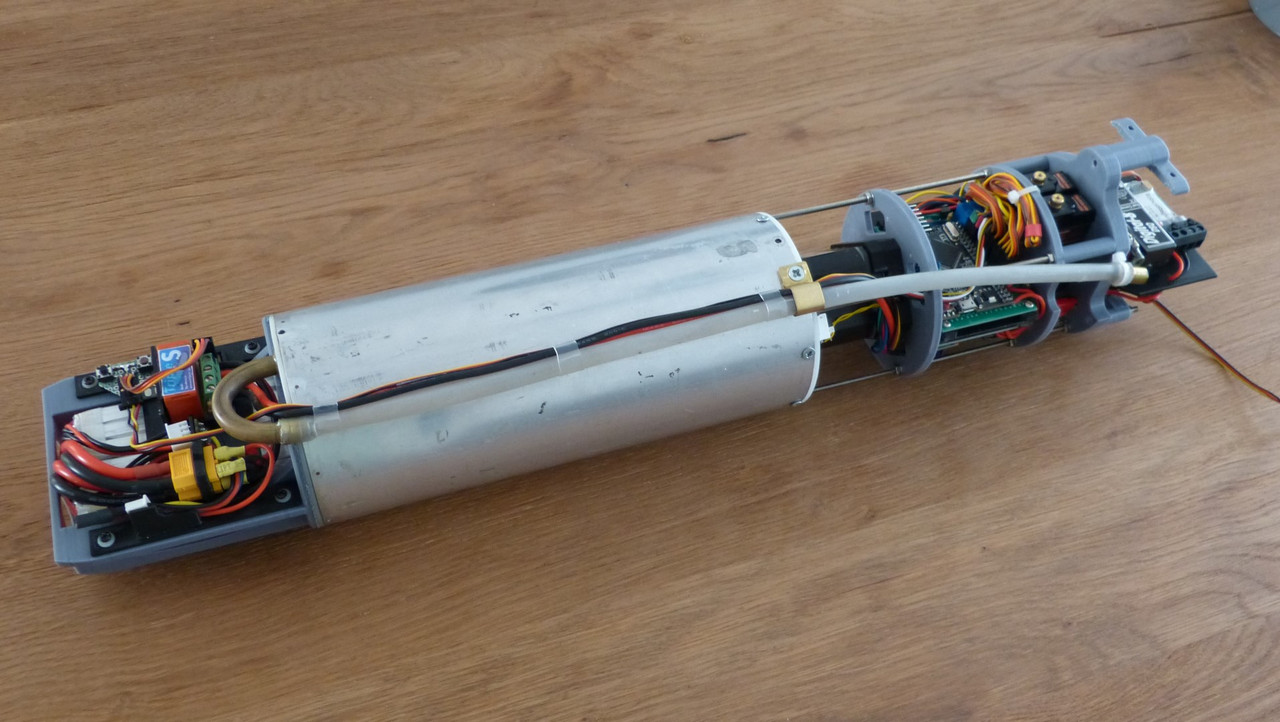
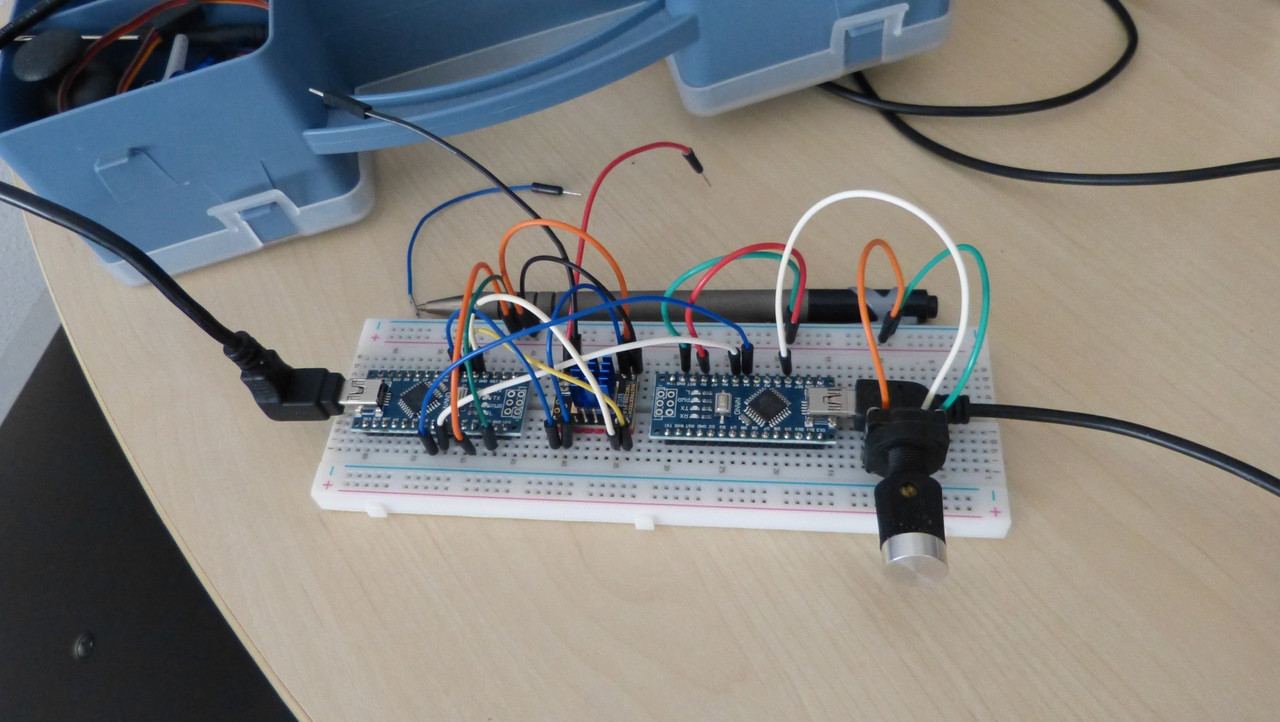
Uit de oude doos hoe het eerst zat:

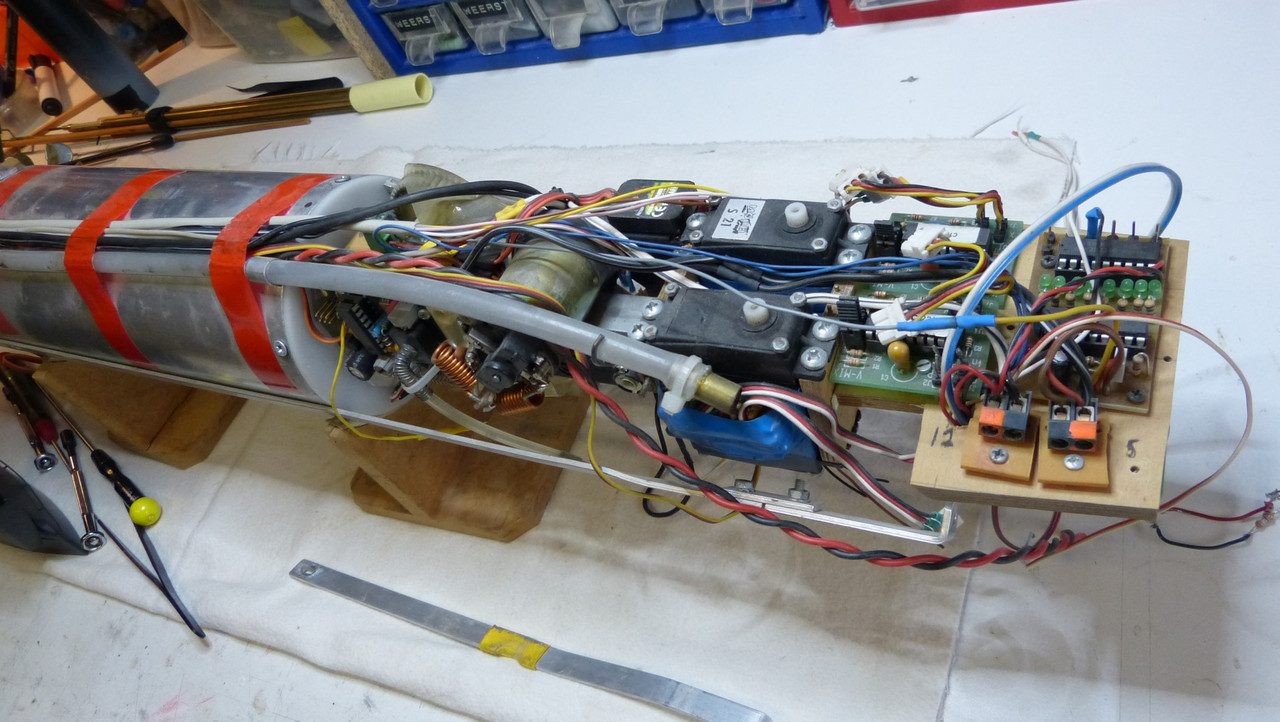
Heel wat meer printjes met allerlei functies, en veeeeeel meer draden! Dat dit ooit goed gewerkt heeft .....

Enkel de magneetschakelaar is hergebruikt.
Het programma voor de Arduino is echter nog verre van klaar. Maar nu alles aangesloten is kan dit nu ook verder voltooid worden.
De oplettende lezer ziet wellicht een andere ontvanger dan de Robbe R118 waar eerst sprake van was. Die heeft geen failsave op signaalontvangst, en dat met de Arduino doen kreeg ik met het snelle inlezen van de ontvanger signalen niet voor elkaar. Deze SDQ Digital-8 heeft een programmeerbare failsave op alle kanalen, en neemt die veiligheidsvoorziening nu voor zijn rekening. Geen signaal = duiktank leeg, vaarmotor uit, duikroeren op vol up. Beveiliging op water in de boot en onderspanning gaat de Mega doen.
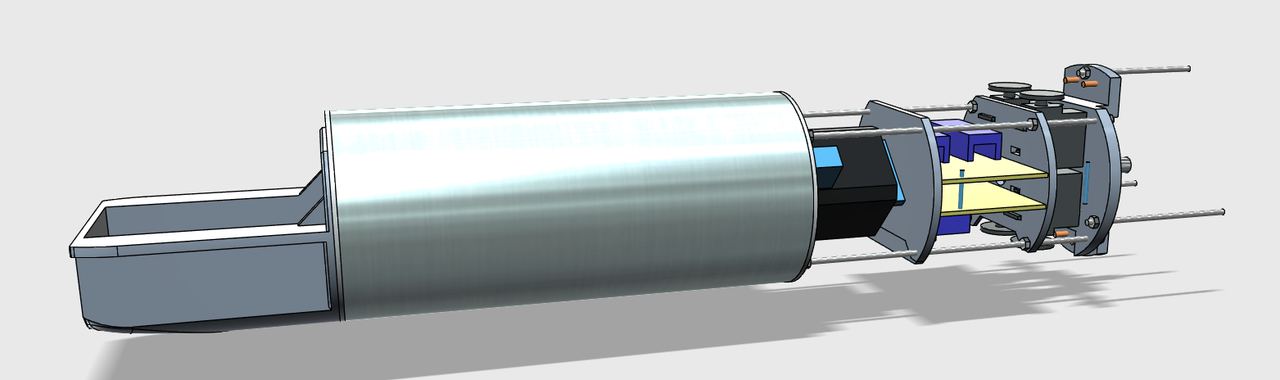
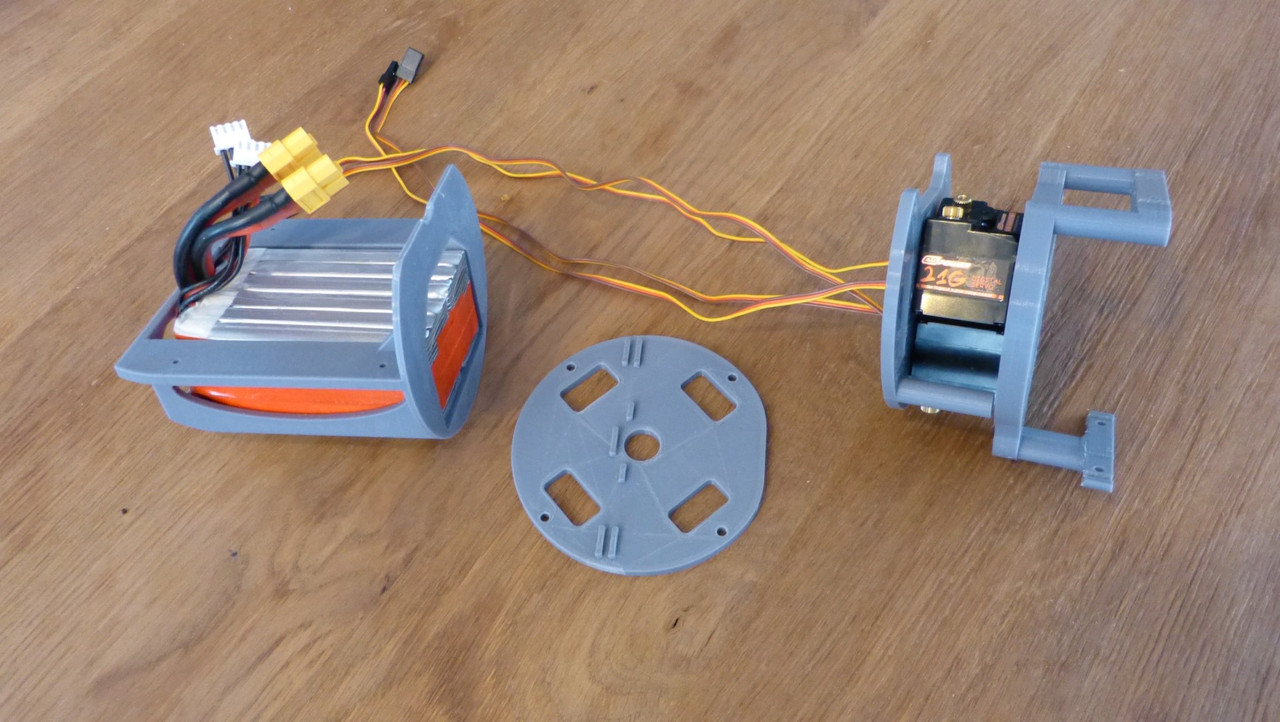
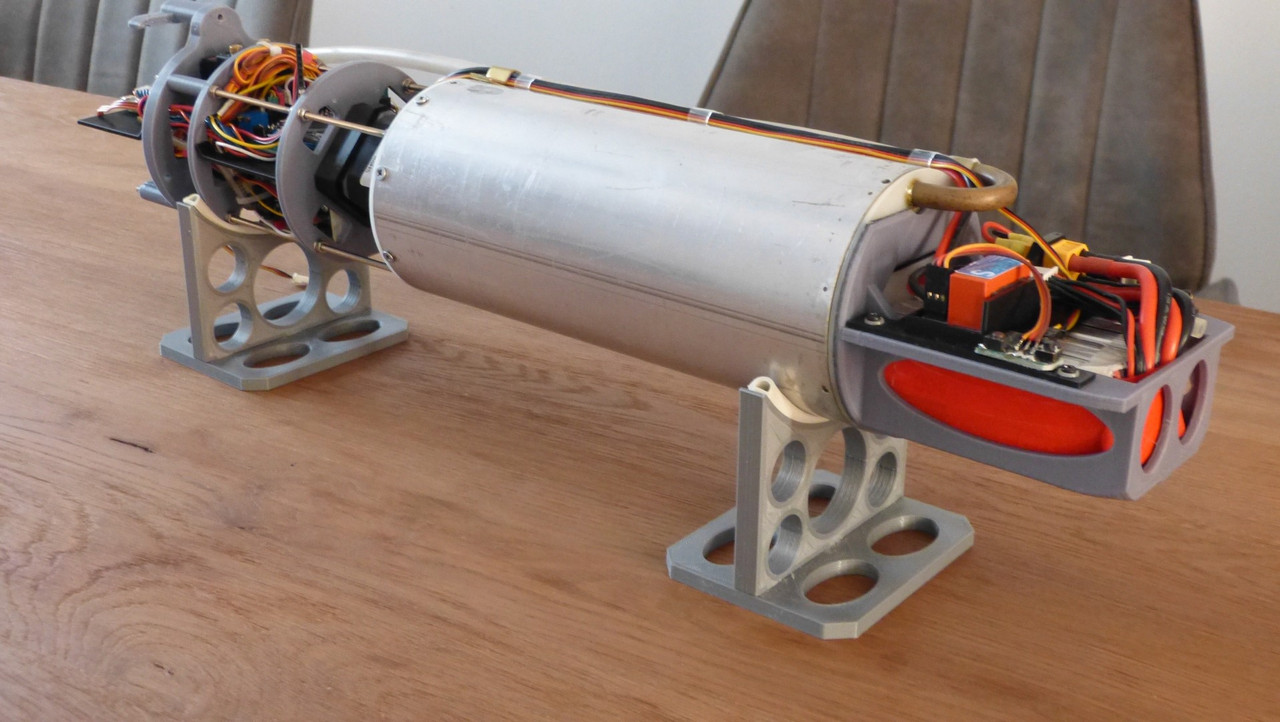
 De eerste opzet van het nieuwe techrek is er.
De eerste opzet van het nieuwe techrek is er.