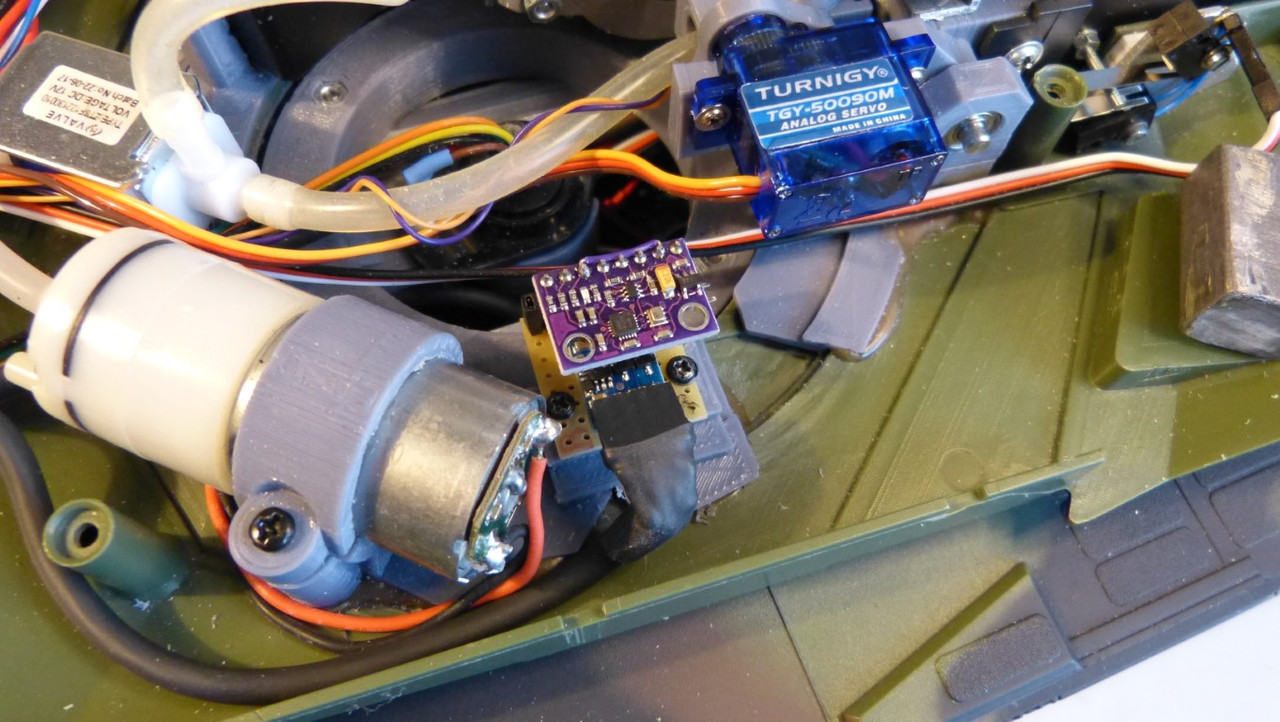
Weer wat verder ... de elevatie werkt nu ook goed. Het bleek in twee dingen te zitten; ik ben uitgegaan van een bewegende sensor ten opzichte van de koepel (met de sensorwaardes als basis) maar ik moest uitgaan van een bewegend koepel ten opzichte van de sensor (met de rotatiewaarde als basis). Klinkt een beetje abstract, maar ik weet ook niet hoe ik dat beter kan zeggen.
Daarnaast blijkt de gyro op de x en y as behoorlijk last van drift te hebben zodra die boven een bepaalde snelheid geroteerd wordt op de z as. Ook dit is, zij het niet geheel, opgelost. De tank en koepel draaien nu wat rustiger, en ik heb de 'truc' toegepast dat elke keer als de stabilisering wordt ingeschakeld de waarde van x en y as als nulpunt op te slaan, en van daar uit verder te rekenen. Daarmee blijft de loop nu ook in de verticaal aardig goed op z'n doel staan.
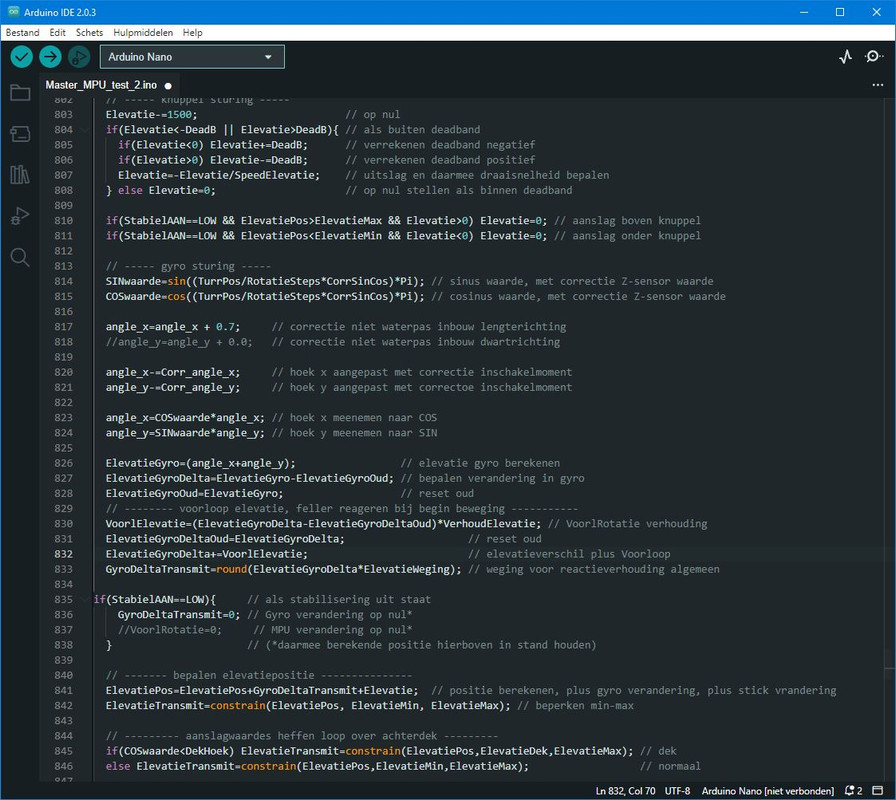
Hier het gedeelte van de Arduino sketch waar die gestabiliseerde elevatie berekend wordt:
Maar toch heb ik een gyro module met een betere chip erop besteld, in de hoop dat daarbij de waardes minder driften. Eens kijken of daarmee nog meer te verbeteren valt. Ik zal kijken of ik dit weekend een video kan uploaden met hoe het nu gaat.
Daarnaast blijkt de gyro op de x en y as behoorlijk last van drift te hebben zodra die boven een bepaalde snelheid geroteerd wordt op de z as. Ook dit is, zij het niet geheel, opgelost. De tank en koepel draaien nu wat rustiger, en ik heb de 'truc' toegepast dat elke keer als de stabilisering wordt ingeschakeld de waarde van x en y as als nulpunt op te slaan, en van daar uit verder te rekenen. Daarmee blijft de loop nu ook in de verticaal aardig goed op z'n doel staan.
Hier het gedeelte van de Arduino sketch waar die gestabiliseerde elevatie berekend wordt:
Maar toch heb ik een gyro module met een betere chip erop besteld, in de hoop dat daarbij de waardes minder driften. Eens kijken of daarmee nog meer te verbeteren valt. Ik zal kijken of ik dit weekend een video kan uploaden met hoe het nu gaat.
Laatst bewerkt:
")






")
 ..
..