Ik had nog geen plekje waar ik al m'n vliegende hakselaartjes showde, dus bij deze:
Het begon in 2015, aangestoken door de filmpjes van MetallDanny het internet afstruinend op zoek naar (voor mij) een betaalbaar alternatief van een FPV mini-quad. Bruce Simpson zijn "how-To build a cheap race drone" gevonden op Youtube en aan de hand van zijn richtlijnen en andere voorhanden zijnde informatie van alles en nog wat van over de hele wereld besteld. Een heel stijle leercurve maar met een technische achtergrond (MTS besturingstechniek) niet al teveel abracadabra.
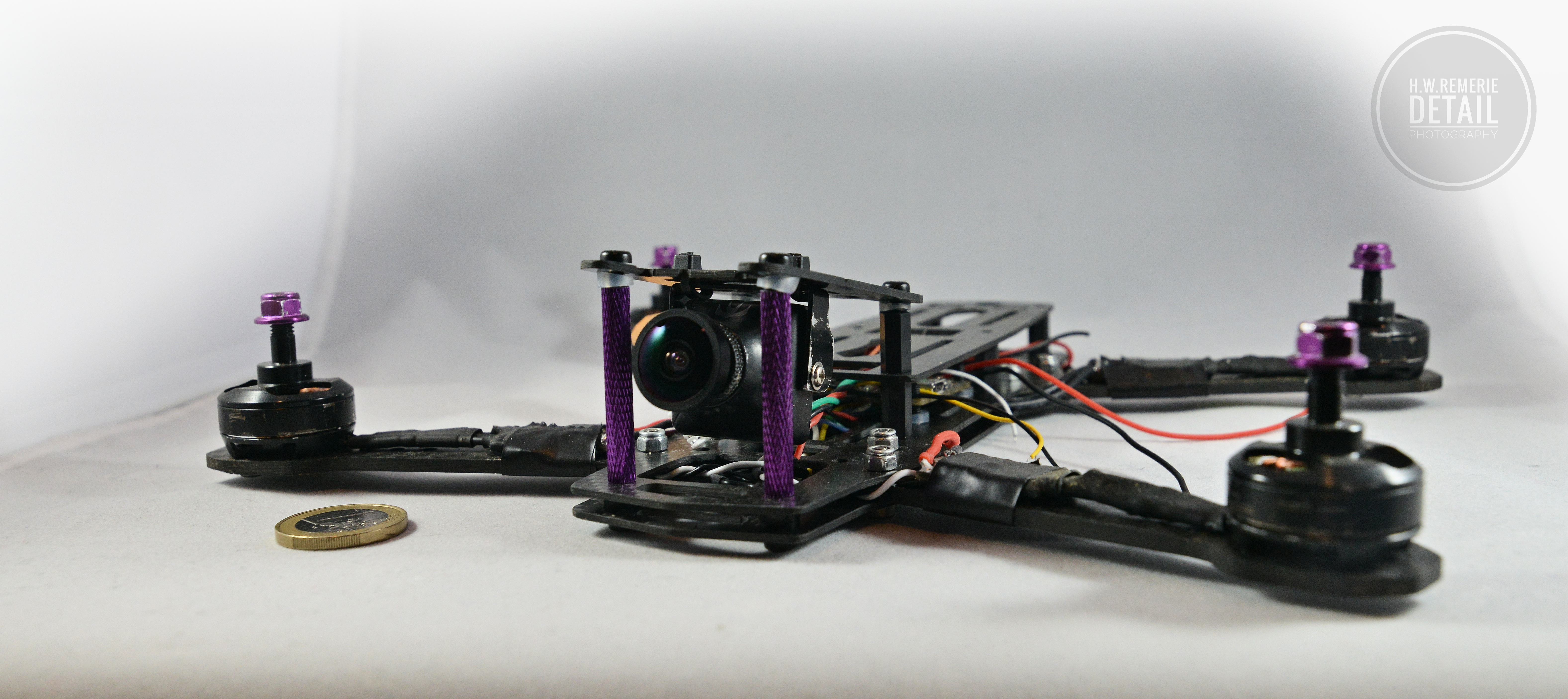
Het werd deze schoonheid -

Een ZMR 250 H-frame
- 250 mm motor tot motor
- Naze32 vluchtcomputer
- DYS20A ESC's
- Cobra 2204/2300 kV
- geschikt voor 5" - 6" props (ik vloog in het begin 5x45 bullnose props, later 5x4x3 DAL's)
- Runcam Swift FPV camera (was eerst een Runcam-printplaat-met-camera maar dat was erg fragiel)
- Verschillende chinese Video transmitters
- minimOSD met scarab overlay
- Flysky 6 kanaals PWM ontvanger
Zo zwaar als een betonblok en zo vliegt het ook. Samen met de 1800 mAh LIPO weegt het hele ding makkelijk tegen de 600 gram waardoor het echt log aanvoeld, helemaal in combinatie met 2204's. Met dit frame heb ik de eerste stapjes gezet in het FPV vliegen met een mini-quad gedurende 2 seizoenen. Echt heel veel geleerd in die tijd.
Omdat ik erachter was gekomen dat het zwaartepunt erg hoog ligt op zo'n mini-quad ben ik gaan expirimenteren met de hoogte van de top-plaat te veranderen:
En dat resulteerde in de "low rider" versie van de ZMR 250. Alleen het camera gedeelte is hier nog op de originele hoogte (loopt zelfs af onder 20 graden) maar vlak daarachter is de top-plaat doorgezaagd en een milimeter of 20 verlaagd. Erg uitdagend om alles hier in te krijgen maar de electronica onderdelen werden in 2016 al een stuk kleiner en goedkoper. Nog een groot verschil is dat ik was afgestapt van een storingsgevoelige bodemplaat PDB (met 5V en 12V gefilterde voeding en aansluiting voor de ESC's) naar een simpele draadboom met polulu 5V voeding. Onder het motto "hou het simpel".
De rest van de electronica werd wat ge-upgrade naar Littlebee 20A ESC's en een Flysky ppm Rx.
Ook dit was zwaar en log en vloog als een boomstam dus zocht ik voor seizoen 2107 iets anders:

En dat werd de Epiquad210X lowrider. Een origineel Nederlands frame ontwikkeld door de gasten van Quadcoptersenzo. Ik had er al erg goede geluiden over gehoord en was zelf al bezig geweest met een lowrider dus dit leek me het perfecte volwaardige fabrieks-frame.
Dit keer ook geen H-frame maar een X-frame waardoor het wendbaarder vliegt.
Setup:
- Epiquad 210 X frame - 210mm motor tot motor
- Betaflight-F3 vluchtcomputer
- Racerstar30A ESC's
- Cobra 2205/2300kV race edition motoren
- Kingkong 5x4x3 props
- IRC Tramp videotransmitter
- Runcam Swift FPV camera met Gopro3 lens
- Frsky D4R-II Rx op sbus
Deze weegt zonder LIPO 396 gram en in combinate met de vorm van het frame en de 2 jaar jongere electronica/software en verbeterde Cobra motoren echt een genot om mee te vliegen.
Na seizoen 2017 kreeg ik de opwelling om in het najaar en de winter door te blijven vliegen, enkel is het dan wel nat en koud. Wil je dan FPV blijven vliegen dan bevriezen je vingers bij wijze aan je sticks. Dus zat ik te denken om indoor te gaan vliegen in verlaten parkeergarage's. Maar om nou in een betonnen omgeving te gaan vliegen met een nogal dure mini-quad (kost met elkaar toch al snel zo rond de 400€) dat vond ik nogal wat. Dus moest er een oplossing komen:

En dat is een micro-quad geworden; De Kingkong Flyegg 100 om precies te zijn. Kan je in de palm van je hand leggen en weegt slecht 82! gram... Parkeer je dit tegen een betonnen peiler dan zit er een krasje op je props en vlieg je gewoon verder.
Het is weer een X-frame (H-frame = snelheid, X-frame = wendbaarheid simpel gezegd) met een motor tot motor basis van 100 mm. Een volwaardige mini-quad met brushless motoren maar dan echt ini-mini.
De props zijn 2 Inch en worden voortgestuwd door 1104/7000 kV motortjes van Racerstar aangedreven door een HGLRC-XJB-F428 all-in-one stack, dat is een Omnibus F4 vluchtcomputer met een 4in1 28A ESC PDB die alles mede voorziet van 5V. Hier zit ook nog een Runcam micro-Swift kloon bij die ik passend heb gekregen in het aluminium gedeelte van het frame (wat lijkt op een ei, vandaar de naam Fly-EGG) door wat materiaal weg te Dremelen. En dat video signaal gaat dan via de interne betaflight-OSD (ook nog) naar een micro Videotransmitter die het video-signaal verzorgd op een legale 25mW sterkte, en dat op alle mogelijk denkbare 5,2 GHz banden. Als radio-ontvanger heb ik hier het nieuwe paradepaardje van Frsky op gezet: de R-XSR. Echt een onbegrijpelijk kleine, lichte ontvanger met telemetrie.
Ongeveer 2 jaar geleden begon het gezeur wereldwijd over drones en werden er in veel landen wetten bedacht waar bijvoorbeeld het gewicht van een drone bepalend is of je er wel of niet zomaar mee mag vliegen. In veel landen (onder andere in de U.S.A. en Duitsland) is dat vastgesteld op 250 gram. Ik riep toen al dat het een kwestie van tijd zou zijn voor de technologie deze uitdaging zou gaan halen en zie hier:
Een "drone" van 121 gram vlieg gewicht ... En het vliegt als een volwaardige 5" mini-quad.
Life is good
* edit: een drone is een autonoom capabel vliegend voorwerp, een FPV-miniquad is een afstandbestuurd vliegend voorwerp. Dat is dus hetzelfde principe als een op afstand bestuurd RC vliegtuig. Doe je niks met je sticks dan dondert de boel uit de lucht. Dus een FPV-miniquad is net zo min een drone als een RC vliegtuig.
Een DJI (Phantom, Mavick etc.) is een voorbeeld van een drone. Doe je bij een DJI niks met de sticks dan zorgt deze er wel voor dat hij niet crashed. Je kan hem ook autonoom een padje langs laten vliegen. Gaat je bij een normaal RC vliegtuig of een mini-quad echt niet lukken, daar heb je ervaring en skills nodig om de boel in de lucht te houden.
Het begon in 2015, aangestoken door de filmpjes van MetallDanny het internet afstruinend op zoek naar (voor mij) een betaalbaar alternatief van een FPV mini-quad. Bruce Simpson zijn "how-To build a cheap race drone" gevonden op Youtube en aan de hand van zijn richtlijnen en andere voorhanden zijnde informatie van alles en nog wat van over de hele wereld besteld. Een heel stijle leercurve maar met een technische achtergrond (MTS besturingstechniek) niet al teveel abracadabra.
Het werd deze schoonheid -
ZMR250 Original
Mijn allereerste racequad, 250mm motor tot motor : Bodemplaat PDB - Naze32 Flightcontroller -...
Een ZMR 250 H-frame
- 250 mm motor tot motor
- Naze32 vluchtcomputer
- DYS20A ESC's
- Cobra 2204/2300 kV
- geschikt voor 5" - 6" props (ik vloog in het begin 5x45 bullnose props, later 5x4x3 DAL's)
- Runcam Swift FPV camera (was eerst een Runcam-printplaat-met-camera maar dat was erg fragiel)
- Verschillende chinese Video transmitters
- minimOSD met scarab overlay
- Flysky 6 kanaals PWM ontvanger
Zo zwaar als een betonblok en zo vliegt het ook. Samen met de 1800 mAh LIPO weegt het hele ding makkelijk tegen de 600 gram waardoor het echt log aanvoeld, helemaal in combinatie met 2204's. Met dit frame heb ik de eerste stapjes gezet in het FPV vliegen met een mini-quad gedurende 2 seizoenen. Echt heel veel geleerd in die tijd.
Omdat ik erachter was gekomen dat het zwaartepunt erg hoog ligt op zo'n mini-quad ben ik gaan expirimenteren met de hoogte van de top-plaat te veranderen:
ZMR250 Custom Lowrider
Een gemodificeerd ZMR250 frame: er is een "lowrider" van gemaakt dus extreem lage top-plaat met...
En dat resulteerde in de "low rider" versie van de ZMR 250. Alleen het camera gedeelte is hier nog op de originele hoogte (loopt zelfs af onder 20 graden) maar vlak daarachter is de top-plaat doorgezaagd en een milimeter of 20 verlaagd. Erg uitdagend om alles hier in te krijgen maar de electronica onderdelen werden in 2016 al een stuk kleiner en goedkoper. Nog een groot verschil is dat ik was afgestapt van een storingsgevoelige bodemplaat PDB (met 5V en 12V gefilterde voeding en aansluiting voor de ESC's) naar een simpele draadboom met polulu 5V voeding. Onder het motto "hou het simpel".
De rest van de electronica werd wat ge-upgrade naar Littlebee 20A ESC's en een Flysky ppm Rx.
Ook dit was zwaar en log en vloog als een boomstam dus zocht ik voor seizoen 2107 iets anders:
Epiquad 210X Lowrider
Mijn dagelijkse 5" racequad: 210mm motor tot motor met een BetaflightF3-FC - Racerstar 30A ESC's...
En dat werd de Epiquad210X lowrider. Een origineel Nederlands frame ontwikkeld door de gasten van Quadcoptersenzo. Ik had er al erg goede geluiden over gehoord en was zelf al bezig geweest met een lowrider dus dit leek me het perfecte volwaardige fabrieks-frame.
Dit keer ook geen H-frame maar een X-frame waardoor het wendbaarder vliegt.
Setup:
- Epiquad 210 X frame - 210mm motor tot motor
- Betaflight-F3 vluchtcomputer
- Racerstar30A ESC's
- Cobra 2205/2300kV race edition motoren
- Kingkong 5x4x3 props
- IRC Tramp videotransmitter
- Runcam Swift FPV camera met Gopro3 lens
- Frsky D4R-II Rx op sbus
Deze weegt zonder LIPO 396 gram en in combinate met de vorm van het frame en de 2 jaar jongere electronica/software en verbeterde Cobra motoren echt een genot om mee te vliegen.
Na seizoen 2017 kreeg ik de opwelling om in het najaar en de winter door te blijven vliegen, enkel is het dan wel nat en koud. Wil je dan FPV blijven vliegen dan bevriezen je vingers bij wijze aan je sticks. Dus zat ik te denken om indoor te gaan vliegen in verlaten parkeergarage's. Maar om nou in een betonnen omgeving te gaan vliegen met een nogal dure mini-quad (kost met elkaar toch al snel zo rond de 400€) dat vond ik nogal wat. Dus moest er een oplossing komen:
Flyegg100
Kingkong Flyegg 100: 100mm motor tot motor frame met een HGLRC-XJB-F428 All-In-One stack -...
En dat is een micro-quad geworden; De Kingkong Flyegg 100 om precies te zijn. Kan je in de palm van je hand leggen en weegt slecht 82! gram... Parkeer je dit tegen een betonnen peiler dan zit er een krasje op je props en vlieg je gewoon verder.
Het is weer een X-frame (H-frame = snelheid, X-frame = wendbaarheid simpel gezegd) met een motor tot motor basis van 100 mm. Een volwaardige mini-quad met brushless motoren maar dan echt ini-mini.
De props zijn 2 Inch en worden voortgestuwd door 1104/7000 kV motortjes van Racerstar aangedreven door een HGLRC-XJB-F428 all-in-one stack, dat is een Omnibus F4 vluchtcomputer met een 4in1 28A ESC PDB die alles mede voorziet van 5V. Hier zit ook nog een Runcam micro-Swift kloon bij die ik passend heb gekregen in het aluminium gedeelte van het frame (wat lijkt op een ei, vandaar de naam Fly-EGG) door wat materiaal weg te Dremelen. En dat video signaal gaat dan via de interne betaflight-OSD (ook nog) naar een micro Videotransmitter die het video-signaal verzorgd op een legale 25mW sterkte, en dat op alle mogelijk denkbare 5,2 GHz banden. Als radio-ontvanger heb ik hier het nieuwe paradepaardje van Frsky op gezet: de R-XSR. Echt een onbegrijpelijk kleine, lichte ontvanger met telemetrie.
Ongeveer 2 jaar geleden begon het gezeur wereldwijd over drones en werden er in veel landen wetten bedacht waar bijvoorbeeld het gewicht van een drone bepalend is of je er wel of niet zomaar mee mag vliegen. In veel landen (onder andere in de U.S.A. en Duitsland) is dat vastgesteld op 250 gram. Ik riep toen al dat het een kwestie van tijd zou zijn voor de technologie deze uitdaging zou gaan halen en zie hier:
Een "drone" van 121 gram vlieg gewicht ... En het vliegt als een volwaardige 5" mini-quad.
Life is good
* edit: een drone is een autonoom capabel vliegend voorwerp, een FPV-miniquad is een afstandbestuurd vliegend voorwerp. Dat is dus hetzelfde principe als een op afstand bestuurd RC vliegtuig. Doe je niks met je sticks dan dondert de boel uit de lucht. Dus een FPV-miniquad is net zo min een drone als een RC vliegtuig.
Een DJI (Phantom, Mavick etc.) is een voorbeeld van een drone. Doe je bij een DJI niks met de sticks dan zorgt deze er wel voor dat hij niet crashed. Je kan hem ook autonoom een padje langs laten vliegen. Gaat je bij een normaal RC vliegtuig of een mini-quad echt niet lukken, daar heb je ervaring en skills nodig om de boel in de lucht te houden.
Laatst bewerkt:

")

") ImmersionRC komt wel in de buurt met hun RTF spul trouwens; goed spul voor een goede prijs.
ImmersionRC komt wel in de buurt met hun RTF spul trouwens; goed spul voor een goede prijs.