Dat is niet veel. Mijn ornithopters van dat formaat komen tot de 7 gram...
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Ornithopter, rubber aangedreven vrije vlucht
- Topicstarter moerman
- Startdatum
Ik kies probeer altijd gewicht te besparen, maar ik verkies sterkte boven gewicht. De vleugel'armen' maak ik van gespleten satéprikkers. Als je die erg dun maakt is het íets zwaarder dan balsa, maar veel sterker, taaier en buigzamer. Maar die 7 gram die mijn nieuwste 'opwindvogel' nu weegt wordt vooral veroorzaakt door het aandrijfmechanisme.
Hoe kom jij aan je spanpapier?
En hoe heb je de staart aan dat ijzerdraadje bevestigd?
Hoe kom jij aan je spanpapier?
En hoe heb je de staart aan dat ijzerdraadje bevestigd?
Bamboe gebruik ik ook regelmatig en ik zie het als een soort "poor man's carbon fibre". Extra sterkte en meer gewicht heeft altijd twee nadelen: het model moet sneller vliegen om voldoende lift te krijgen en de impact wordt groter omdat het gewicht hoger is. En het is de vraag of een beter aandrijfmechanisme het extra gewicht zal compenseren. Ik ben wel benieuwd hoe je dit mecanisme uitvoert, kan je een fotootje laten zien?
Mijn spanpapier bestel ik per internet bij FreeFlightSupplies (Micheal Woodhouse). Het is Esaki Light met een gewicht van 12 g/m².
De staart heb ik volgens tekening aan het ijzer gelijmd: eind 90 graden omhoog gebogen, in de vork van de balsa staart gelijmd met royaal lijm, stukje spanpaier erover, klaar.
Mijn spanpapier bestel ik per internet bij FreeFlightSupplies (Micheal Woodhouse). Het is Esaki Light met een gewicht van 12 g/m².
De staart heb ik volgens tekening aan het ijzer gelijmd: eind 90 graden omhoog gebogen, in de vork van de balsa staart gelijmd met royaal lijm, stukje spanpaier erover, klaar.
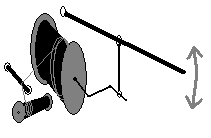
Alstublieft. Ik heb even wat geprobeerd te tekenen. Een magere uitleg is denk ik wel handig:
De onderste katrol wordt aangedreven door het rubber. Die windt (via een rolletje) touw af dat om de bovenste wikkelplaat is gewikkeld. Doordat die plaat een elliptische (schrijf ik dat goed?) vorm heeft wordt er bij de opslag en de neerslag van een grotere hefboom gebruik gemaakt dan wanneer de krukas het bovenste stukje van zijn rondje maakt. Daar is toch niet zoveel kracht voor nodig. Daarom wordt er bij de op- en neerslag meer touw verbruikt dan bij dan bij de rest. Zo wordt er touw- én toeren van de rubbermotor bespaard.
Vergelijk het maar met als de bovenste 'katrol' helemaal rond zou zijn... Dan zou er touw verspeeld worden bij het stukje dat de krukas beweegt tussen de opslag en de neerslag, omdat daar amper kracht voor nodig is.
Dit systeem is uitgevonden door Erich von Holst, een ornitholoog uit Duitsland die ergens rond de jaren 40 leefde.
Zie http://ornithopter.de/nederlands/herzog_nl.htm
en http://ornithopter.de/daten/holst1.pdf
en http://ornithopter.de/daten/herzog/63mar.pdf
en http://ornithopter.de/daten/herzog/63apr.pdf
Laatst bewerkt door een moderator:
Moerman, ik heb m'n tekening geplaatst. Zie vorige bericht
Moerman, ik heb m'n tekening geplaatst. Zie vorige bericht
Ziet er complex uit. Zou je het gene dat je met je mechanisme wint, niet meteen verliezen door alle weerstand van de katrollen?
Kevin
Daar zit wat in. Ik denk dat het bij grote modellen wel degelijk toerenwinst oplevert, bij kleine modellen minder of helemaal niet. In een groot model kun je misschien lagers gebruiken, dat is voor een klein model te zwaar. Dit komt ook door het gewicht. In een groot model weegt zoon systeem waarschijnlijk in verhouding minder dan in een klein model.
Interressant systeem. Ik denk wel dat kevin een punt heeft mbt gewicht en wrijving. Ik heb nog een bouwtekening liggen van een ornithopter met twee paar vleugels waarbij de slag van het ene paar een kwart achterloopt op de andere. Op die manier wordt het rubber continu gelijk belast en heb je dat verlies dus niet. Als je wilt kan ik je die tekening mailen. Het is een vrij groot model voor buiten.
Mijn ornithopter vliegt op zo'n 500 slagen. Hoeveel touw heb je daarvoor nodig?
Een alternatief is een overbrenging met eliptische tandwielen. Verkrijgbaarheid kan alleen wat lastig zijn.....
Mijn ornithopter vliegt op zo'n 500 slagen. Hoeveel touw heb je daarvoor nodig?
Een alternatief is een overbrenging met eliptische tandwielen. Verkrijgbaarheid kan alleen wat lastig zijn.....
Interressant systeem. Ik denk wel dat kevin een punt heeft mbt gewicht en wrijving. Ik heb nog een bouwtekening liggen van een ornithopter met twee paar vleugels waarbij de slag van het ene paar een kwart achterloopt op de andere. Op die manier wordt het rubber continu gelijk belast en heb je dat verlies dus niet. Als je wilt kan ik je die tekening mailen. Het is een vrij groot model voor buiten.
Mijn ornithopter vliegt op zo'n 500 slagen. Hoeveel touw heb je daarvoor nodig?
Een alternatief is een overbrenging met eliptische tandwielen. Verkrijgbaarheid kan alleen wat lastig zijn.....
Hoe wil je dat aandrijven? Als de tandwielen elliptisch zijn grijpen ze het ene moment wel in elkaar en de andere niet...
Ik heb gisteren een vinding gedaan om mijn ornithopter efficienter met zijn energie om te laten gaan. In principe heel simpel, maar bij mijn weten nog niet eerder uitgevoerd! Het gaat om een heel dun elastiekje wat de vleugels naar beneden trekt. Hierdoor hoeft de motor bij de neerwaartse slag niet meer energie te leveren dan bij de opwaartse slag. In de huiskamer ziet dit er veelbelovend uit, de motor kan tot zijn laatste toeren afwinden, terwijl voorheen veel toeren ongebruikt bleven.
Dat had ik ook bedacht en geprobeerd toen ik exact dezelfde had gemaakt... Probleem was alleen dat ik nog niet echt goed en licht kon bouwen. en een veel te sterk elastiekje... Dus die flapte heel even heel hard en stortte dan naar beneden. Het extra elastiekje maakte dus niet heel veel verschil...
Als hij wel goed gebouwd is moet het zeker goed werken lijkt mij!
Als hij wel goed gebouwd is moet het zeker goed werken lijkt mij!
Een elastiekje uitrekken kost energie, die energie krijg je bij terugkrimpen weer terug min een beetje verlies dat in warmte is omgezet. Waarschijnlijk heb je een dood punt met behulp van je elastiekje overwonnen of verschoven. Tijdens de opgaande slag die blijkbaar makkelijk gaat rek je je elastiekje uit, in de neergaande slag gebruik je je rubber, samen met het elastiekje om de moeilijke slag te maken.
Laatst bewerkt:
Hij is dus niet efficienter maar benut de energie van het elastiekje beter door hem verder af te laten wikkelen...
Dat bedoel ik dus met efficienter. Een groter deel van de toeren kan worden gebruikt. Dat moet toch een voordeel geven?
Overigens gebruikt hij alleen al zijn toeren tijdens de vlucht. Wanneer je hem in de hand houdt stopt hij met een hoeveelheid toeren op de motor omdat de kracht van het elastiekje nu niet wordt gecompenseerd door de opwaartse kracht op de vleugels.
Dit systeem heb ik een tijd geleden ook geprobeerd, maar ik ben tot de conclusie gekomen dat je beter voor een sterkere motor kunt zorgen.
Een goed gebouwde ornithopter ontleent zijn voorwaartse kracht voornamelijk aan de opwaartse slag en door zo'n elastiek te plaatsen beperk je de kracht die wordt uitgeoefend met de opwaartse slag.
Overigens wordt het systeem van kracht verdelen tussen de op- en neerwaartse slag al sinds de jaren 90 gebruikt door Horst Räbiger.
Zie: Hoe Ornithopters Vliegen - Aandrijfmechanisme van de EV8
onder het kopje 'Compensatieveren'
Een goed gebouwde ornithopter ontleent zijn voorwaartse kracht voornamelijk aan de opwaartse slag en door zo'n elastiek te plaatsen beperk je de kracht die wordt uitgeoefend met de opwaartse slag.
Overigens wordt het systeem van kracht verdelen tussen de op- en neerwaartse slag al sinds de jaren 90 gebruikt door Horst Räbiger.
Zie: Hoe Ornithopters Vliegen - Aandrijfmechanisme van de EV8
onder het kopje 'Compensatieveren'
Ik heb wel interesse voor die tekening! Ik zal mijn e-mail adres sturen in een berichtje.Interressant systeem. Ik denk wel dat kevin een punt heeft mbt gewicht en wrijving. Ik heb nog een bouwtekening liggen van een ornithopter met twee paar vleugels waarbij de slag van het ene paar een kwart achterloopt op de andere. Op die manier wordt het rubber continu gelijk belast en heb je dat verlies dus niet. Als je wilt kan ik je die tekening mailen. Het is een vrij groot model voor buiten.
Laatst bewerkt: