Ins & Outs
Plan, deel 2
Het plan is om eerst een besturing te maken die helemaal onafhankelijk is van de ontvanger. De besturing heeft natuurlijk wel het gassignaal nodig van de ontvanger....
Om stap één niet te moeilijk te maken wordt eerst een regeling gemaakt
- zonder de aansturing van de luiken (maar de voorbereiding is er al wel)
- zonder motorrem mechanisme

Wat heb je dan allemaal

?
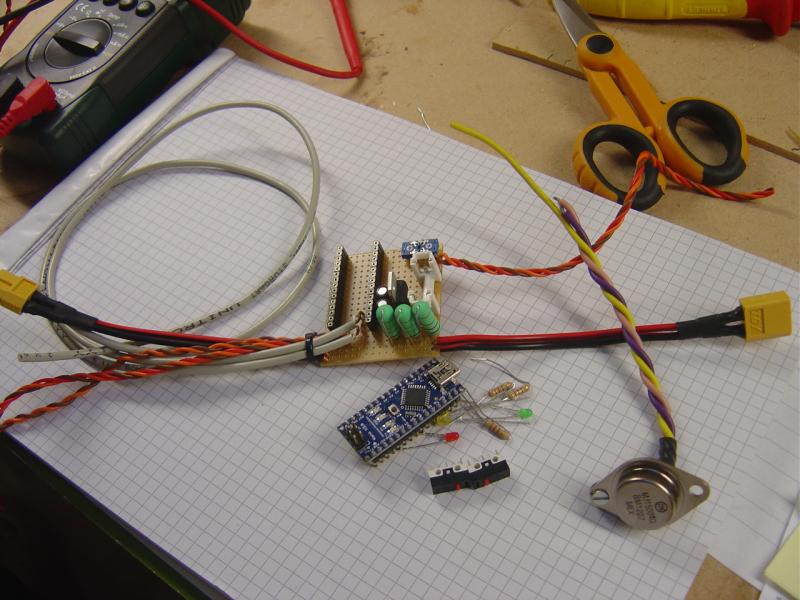
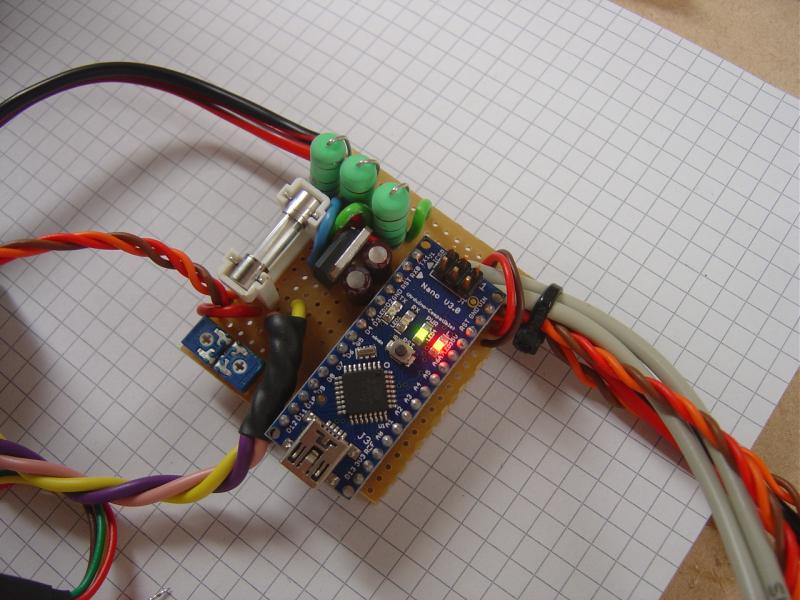
1) Een ontvanger + ontvangeraccupack(je) + servo's en de KTW-unit.
2) De KTW-unit bestaat uit LiPo & besturing.
Waaruit bestaat de KTW
:
1) een LiPo
2) de controller (krijgt spanning direkt uit de LiPo)
3) Extra voeding (die moet de 6V-servo gaan voeden), deze moet ongeveer 10A kunnen leveren.
Ins & Outs:
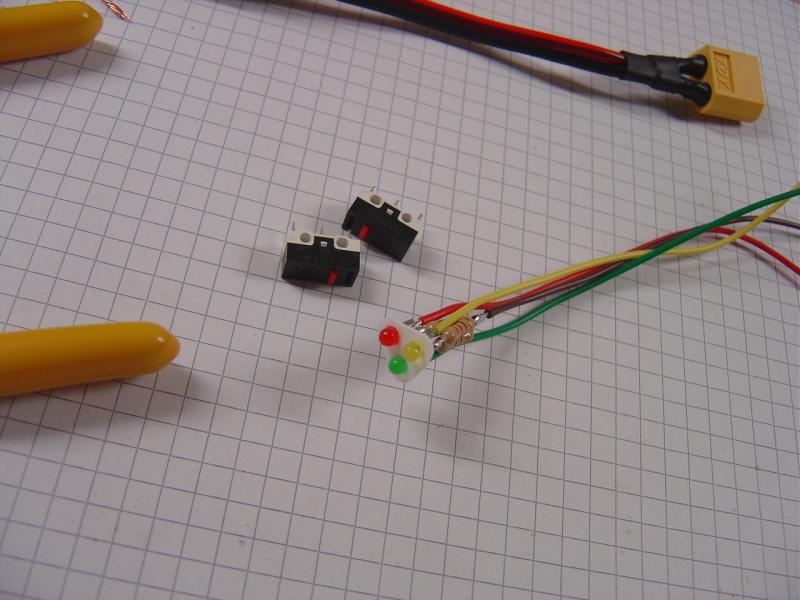
in: KTW in onderste stand (microswitch)
in: KTW in bovenste stand (microswitch)
in: snelheid waarmee servo de KTW in of uit trekt...
in: tijd tussen gasdicht en intrekken KTW
PWM in: gassignaal (van ontvanger)
out: status LED groen
out: status LED oranje
out: status LED rood
PWM out: gassignaal (naar ESC)
PWM out: main servo
PWM out: naar motorrem (nog niet gebruikt)
PWM out: luiken (nog niet gebruikt)
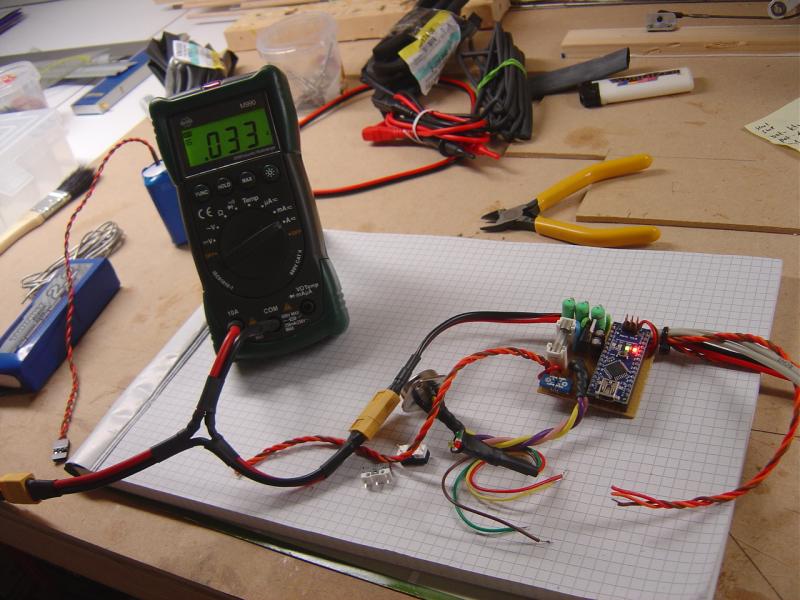
Gelukkig heeft de Nano 14 in/outs, waarvan er 6 PWM (Pulse Width Modulation) kunnen. PWM heb je nodig om servo's te kunnen aansturen en om ontvanger signalen te kunnen lezen. Dus het past...
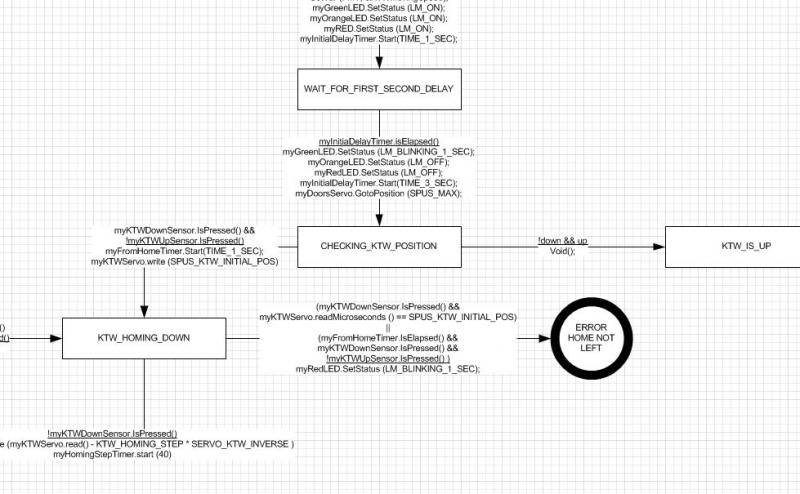
Als dit werkt, dan hebben we een automatische KTW-besturing voor elk willekeurig KTW-systeem, met status info (bijvoorbeeld Graupner's Up&Go 1). Het systeem heeft dan een onderste- en bovenste stand schakelaar en een aparte voeding voor de servo, die de KTW naar boven en onderen trekt... Als je dus "gas" geeft, dan gaat het KTW met een instelbare snelheid omhoog en omlaag. De groene LED knippert tijdens het opstarten (de eindpunten opzoeken) en zal blijven branden als het systeem klaar is voor gebruik. Oranje LED geeft aan of de motor loopt en gaat knipperen als de KTW weer ingetrokken wordt. Dus gas dicht en dan na een tijd, gaat het systeem weer automatisch in. Deze tijd is ook instelbaar. Ook de snelheid waarmee de KTW omhoog gaat is instelbaar. De rode LED gaat knipperen, indien er iets
fout is gegaan (bijvoorbeeld het duurde te lang voordat het KTW in de eindstand stond).
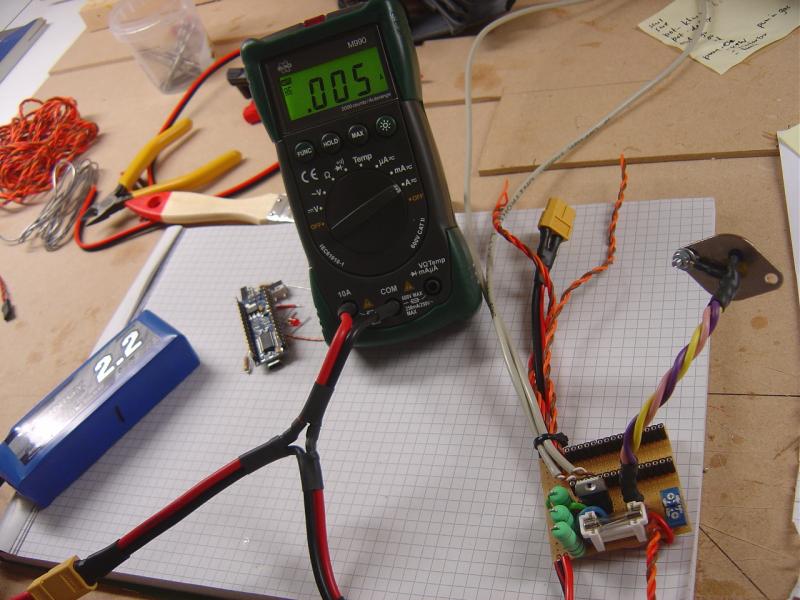
Ik heb nog vele andere ideeen, zoals een spanningsmeter, die de LiPo in de gaten houdt, maar eerst maar eens "even" de basis versie bouwen...
Zo, theoretisch allemaal leuk, maar eerst maar eens even de luiken afmaken + motorrem..... En één ding is zeker

, deze POC is niet voor niets: het blijkt maar weer dat die Mitarbeiter bij Graupner lang zo gek nog niet zijn 8-O.... Bij mijn volgende versie gaan de prop bladen gewoon naar voren wijzen...

")

 Yes!!!
Yes!!! c: lijkt alles makkelijk. Nu nog even doen. Het is iets met magneten (uit HongKong natuurlijk...)
c: lijkt alles makkelijk. Nu nog even doen. Het is iets met magneten (uit HongKong natuurlijk...)