Na 1 jaar vleugel vliegen, waarvan sinds 1 maand ook met videogoggle/FPV, nu begonnen met quad. Lastig vliegen. Oriëntatie met vliegtuig gaat als vanzelf. Maar met quad is weer helemaal opnieuw vliegen leren. Zolang ik er rustig achter blijf lopen, geen probleem (nou ja, toch nog wel eens uit de lucht vallen
")
) Maar zodra naar me toe vliegen: problemen. Vandaag voor eerst met video bril op quad, dat gaat beter. En daar is de quad ook eigenlijk voor gemaakt (bij mij dan).
Spektrum DX6I Fatshark dominator, pan tilt niet gebruikt op de quad
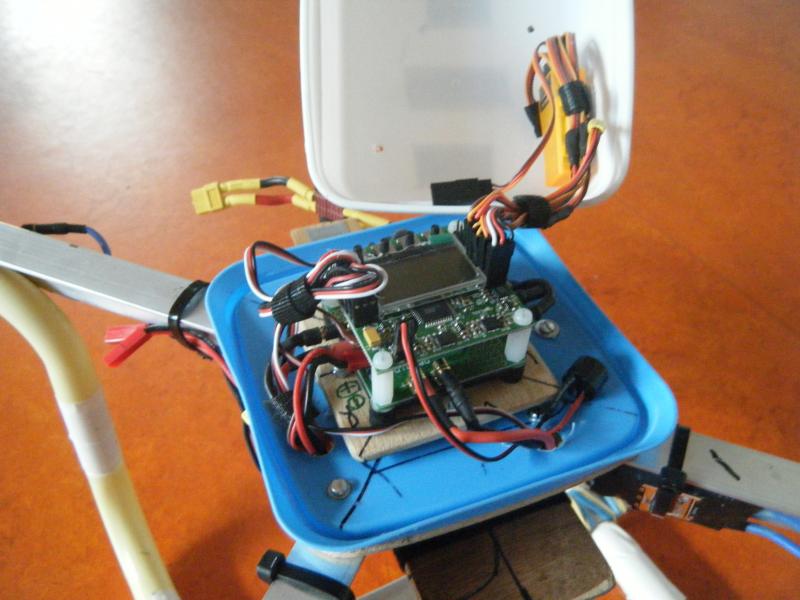
KK LCD board 4 maal Emax Motor CF 28-22 Borstelloze Outrunner 1200kv 4 maal HK SS Serie 25-30A ESC/Regelaar met BEC (Programmeerbaar) HK Quadcopter Power Distribution Bord
Tijdelijk landingsgestel van electriciteitspijp. Ik weet het, ziet er niet uit, maar nu blijft accu heel bij crash en de props vallen binnen het frame dus ook die gaan bijna nooit stuk. Als crashes afnemen gaat frame eraf
")
Props 8X4.5 Er mogen grotere props op deze motortjes, ook 9X5 geprobeerd, Lijkt meer lift, maar moet de gains dan wel heeel ver terug draaien. Ik las op fora dat er gewerkt wordt aan nieuwe firmware om niet werkende autolevel funtie te verbeteren, iemand wat over gehoord?

 ;-)
;-)