Beste multicopter-bouwers. Ook ik ben besmet geraakt met het virus en ben al zo’n half jaar op dit forum aan het lezen en mijn 1e project is nagenoeg klaar. Getracht een eenvoudige quadcopter te bouwen met een heel klein budget. Natuurlijk heeft dat zijn beperkingen, maar het moet een opstap zijn voor de zelfbouw van een degelijke Hexacopter.
De start was de aanschaf van een 2e hands Futuba T6EX zender en een Futuba R617FS ontvanger. Op zich moeten 6 kanalen genoeg zijn omdat hier geen mount of andere zaken onder komen. Simpelweg vliegen en daarmee uit.
Het frame van Hobbyking heb ik van Johan overgenomen en het moet voldoende stevig zijn om niet al te veel te dragen. Het onderstel wat erbij zit is bagger en heb daarom een los onderstel bij Goodluckbey gekocht.

Frame is zwart gespoten en wat foam bescherming om de poten voor demping.
Daarbij de volgende onderdelen gekocht:
Hobbyking
TURNIGY BESC Programming Card
USBasp AVR Programming Device for ATMEL proc
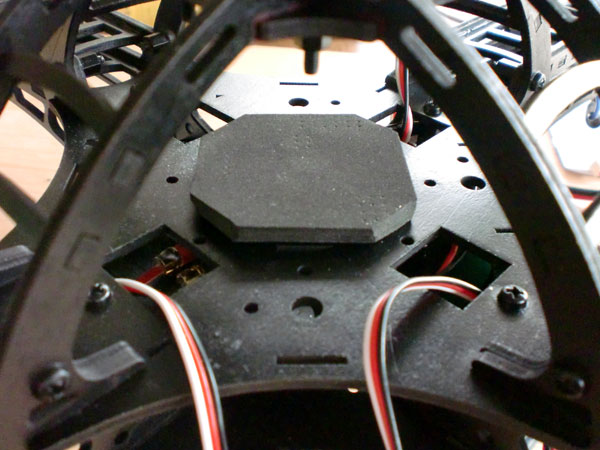
HobbyKing Multi-Rotor Control Board V2.1
PolyMax 3.5mm Gold Connectors 10 PAIRS
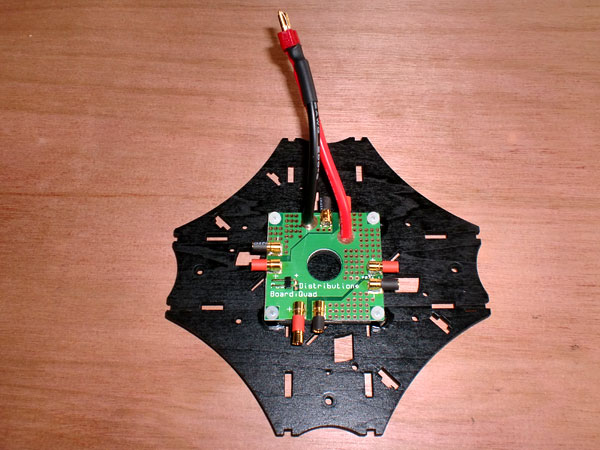
Hobby King Quadcopter Power Distribution Boa
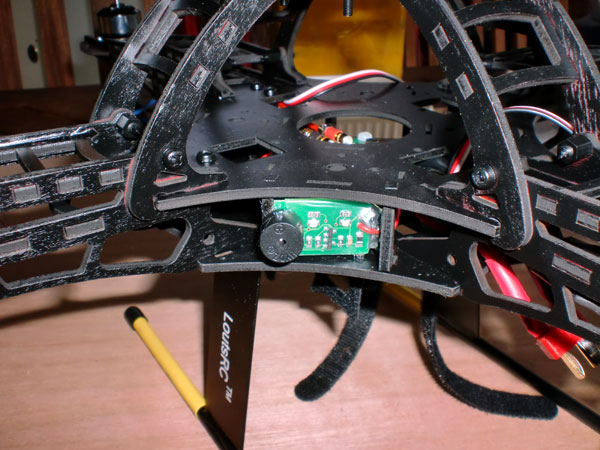
Hobby King Battery Monitor 3S
3cm Male to Male Servo Lead 26AWG (10pcs/set
Goodluckbuy
90x4.5" 9045 9045R CW CCW Propeller For MultiCopter-Orange
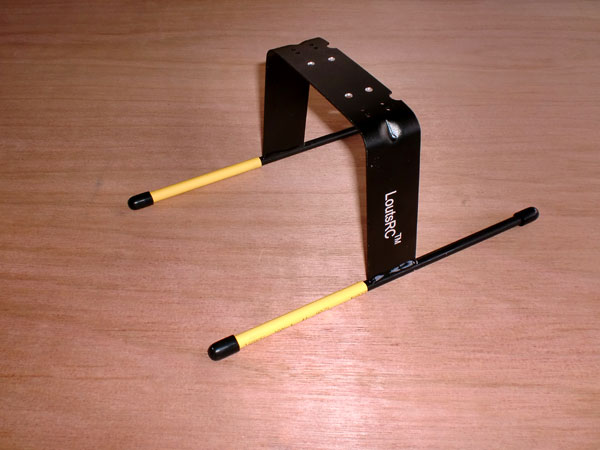
LotusRC T380 Landing Gear for T380 Quadcopter Multicopter
XXD A2208 1200KV Brushless Motor for Quadcopter Multicopter 4-Pack
Lokaal
Hobbyflight Eagle 18A Esc
Props verloop opnemers
Klittenband voor lipo
Levering van Hobbyking was acceptabel, maar de douane deed erg lang over de levering van Goodluckbuy. TNT was het pakje kwijt, kortom 6 weken, maar het was.
Bij de bestelling van de motoren hebben ze (in overleg via de mail) zwarte motoren geleverd. Op zich geen probleem alleen de opnemers zaten er niet bij. Deze lokaal aangeschaft en lijken wat lomp, maar voor deze props is dit passend.

Keuze van de motoren was op basis van info uit het forum en de lift moet voldoende zijn om de hele zaak aan het vliegen te krijgen.
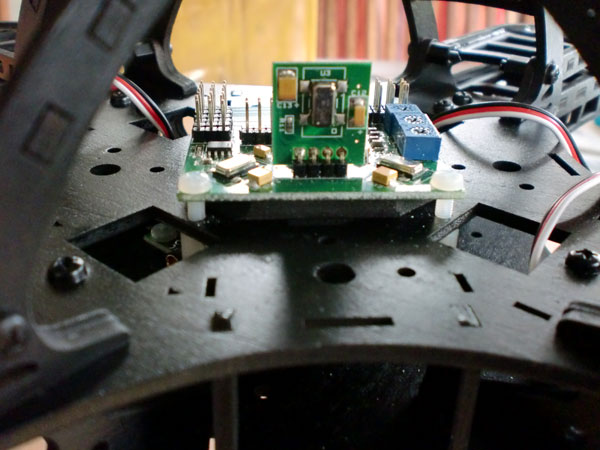
Het powerboard heb ik met kunststof schroefjes (die rijkelijk bij het frame zaten) vastgezet. Een batterijmonitor op het board aangesloten en in het frame zodanig gemonteerd dat de led zichtbaar is vanaf de achterkant.
Het HK-board heb ik geflashed en dat ging wel redelijk goed. Werk met Windows 7 en moest via Hobbyking de drivers voor de USB downloaden. Daarna geflashed zonder problemen.
Het HK-board heb ik op een stuk foam gezet voor demping.

Het frame biedt voldoende ruimte voor alle bekabeling en de regelaars konden nog mooi in de armen weggewerkt worden. Op de foto hangen de draden van de motoren nog los want moet nog kijken of ze wel de goede kant opdraaien. Verder had de lokale verkoper maar 3 ESC’s en staat er 1 in bestelling.
Verder het pindabakje maar opgeofferd als hoedje en voorzien van een opvallende neus voor de richting.

Vandaag begonnen met de zender/ontvanger en dat leverde eerst wat problemen op, maar mbv het forum werkt dit ook.
ESC’s konden zonder problemen geprogrammeerd worden en ik wist niet dat motoren konden zingen. Dit maar snel uitgezet want ik wil geen kermis.
Er lag nog een lipo 3 van 2600mah en 30A
Zaak even aan de spanning en gehangen zo te zien werkt alles. Motoren worden gearmed en starten goed. Daar ik nog op de 4e ESC wacht, laat ik hem verder even zonder spanning.
Zodra de 4e ESC binnen is kan ik gaan afregelen en dan hopelijk…. vliegen …..
De start was de aanschaf van een 2e hands Futuba T6EX zender en een Futuba R617FS ontvanger. Op zich moeten 6 kanalen genoeg zijn omdat hier geen mount of andere zaken onder komen. Simpelweg vliegen en daarmee uit.
Het frame van Hobbyking heb ik van Johan overgenomen en het moet voldoende stevig zijn om niet al te veel te dragen. Het onderstel wat erbij zit is bagger en heb daarom een los onderstel bij Goodluckbey gekocht.
Frame is zwart gespoten en wat foam bescherming om de poten voor demping.
Daarbij de volgende onderdelen gekocht:
Hobbyking
TURNIGY BESC Programming Card
USBasp AVR Programming Device for ATMEL proc
HobbyKing Multi-Rotor Control Board V2.1
PolyMax 3.5mm Gold Connectors 10 PAIRS
Hobby King Quadcopter Power Distribution Boa
Hobby King Battery Monitor 3S
3cm Male to Male Servo Lead 26AWG (10pcs/set
Goodluckbuy
90x4.5" 9045 9045R CW CCW Propeller For MultiCopter-Orange
LotusRC T380 Landing Gear for T380 Quadcopter Multicopter
XXD A2208 1200KV Brushless Motor for Quadcopter Multicopter 4-Pack
Lokaal
Hobbyflight Eagle 18A Esc
Props verloop opnemers
Klittenband voor lipo
Levering van Hobbyking was acceptabel, maar de douane deed erg lang over de levering van Goodluckbuy. TNT was het pakje kwijt, kortom 6 weken, maar het was.
Bij de bestelling van de motoren hebben ze (in overleg via de mail) zwarte motoren geleverd. Op zich geen probleem alleen de opnemers zaten er niet bij. Deze lokaal aangeschaft en lijken wat lomp, maar voor deze props is dit passend.
Keuze van de motoren was op basis van info uit het forum en de lift moet voldoende zijn om de hele zaak aan het vliegen te krijgen.
Het powerboard heb ik met kunststof schroefjes (die rijkelijk bij het frame zaten) vastgezet. Een batterijmonitor op het board aangesloten en in het frame zodanig gemonteerd dat de led zichtbaar is vanaf de achterkant.
Het HK-board heb ik geflashed en dat ging wel redelijk goed. Werk met Windows 7 en moest via Hobbyking de drivers voor de USB downloaden. Daarna geflashed zonder problemen.
Het HK-board heb ik op een stuk foam gezet voor demping.
Het frame biedt voldoende ruimte voor alle bekabeling en de regelaars konden nog mooi in de armen weggewerkt worden. Op de foto hangen de draden van de motoren nog los want moet nog kijken of ze wel de goede kant opdraaien. Verder had de lokale verkoper maar 3 ESC’s en staat er 1 in bestelling.
Verder het pindabakje maar opgeofferd als hoedje en voorzien van een opvallende neus voor de richting.
Vandaag begonnen met de zender/ontvanger en dat leverde eerst wat problemen op, maar mbv het forum werkt dit ook.
ESC’s konden zonder problemen geprogrammeerd worden en ik wist niet dat motoren konden zingen. Dit maar snel uitgezet want ik wil geen kermis.
Er lag nog een lipo 3 van 2600mah en 30A
Zaak even aan de spanning en gehangen zo te zien werkt alles. Motoren worden gearmed en starten goed. Daar ik nog op de 4e ESC wacht, laat ik hem verder even zonder spanning.
Zodra de 4e ESC binnen is kan ik gaan afregelen en dan hopelijk…. vliegen …..
Laatst bewerkt door een moderator:
")
")

