Je hebt het gedaan Cor! Mij met een probleem opzadelen wat mij niet meer loslaat...........
")
Mijn laatste theorie:
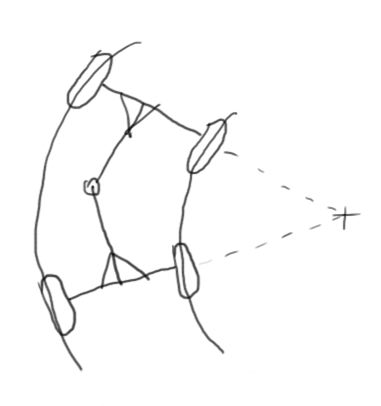
1. uitgangspunt is het door mij eerder voorgestelde knikprincipe.
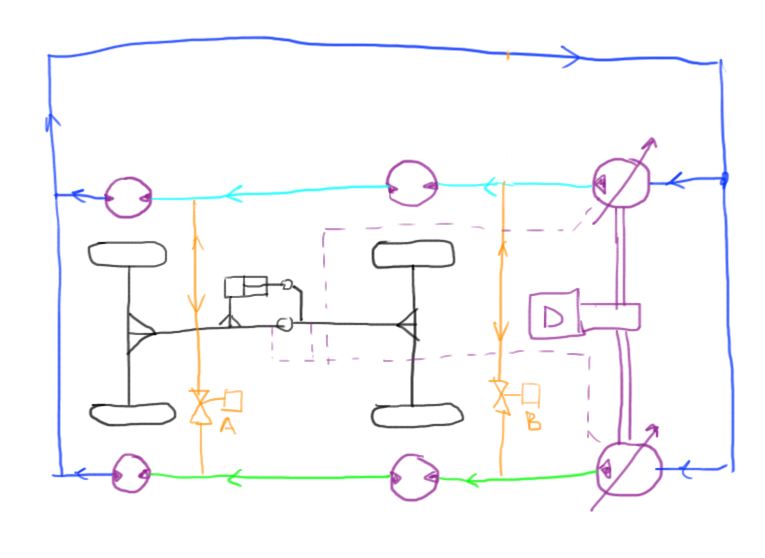
2. als het geheel eenmaal op een bepaalde draaicirkel rijdt kun je dat zonder verdere slip handhaven door de motoren aan iedere kant in serie te zetten. Hydromotoren zullen dan noodgedwongen op hetzelfde toerental draaien. Zie de lichtblauwe en de groene leidingen.
3. Het verschil in snelheid tussen beide kanten zal direct afhangen van de knikhoek die het chassis maakt. Ik heb daarom een koppeling getekend (de paarse stippelijn) tussen een hoek-opnemer en de beide regelbare pompen. Dit zou elektronisch kunnen, maar misschien ook wel mechanisch. De truuk is de juiste overbrengsverhouding te vinden.
4. Om het voertuig te sturen is er een hydraulische cylinder voorzien.
5. Tijdens de knikbeweging moeten de wielen in de binnenbocht naar elkaar toebewegen, en de wielen in de buitenbocht van elkaar af. Dit kan gebeuren door tijdens de knikbeweging de kleppen A en B open te zetten zodat er olie van links naar rechts kan stromen, of vice versa (de oranje leidingen). De pompen sturen dan gezamenlijk een bepaald volume door alle motoren, maar de verdeling tussen links en rechts is vrij, zowel voor als achter. Tussen voor en achter is de verdeling niet vrij, zodat je altijd tractie op de voor- of de achteras houdt.
6. Als de knikbeweging stopt moeten de kleppen A en B weer sluiten. Je hebt sowieso een terugkoppeling nodig tussen de hoekopnemer en je besturing, dus dat moet makkelijk te realiseren zijn. Het voertuig rijdt dan op een vaste draaicirkel, en je bent weer bij punt 2.
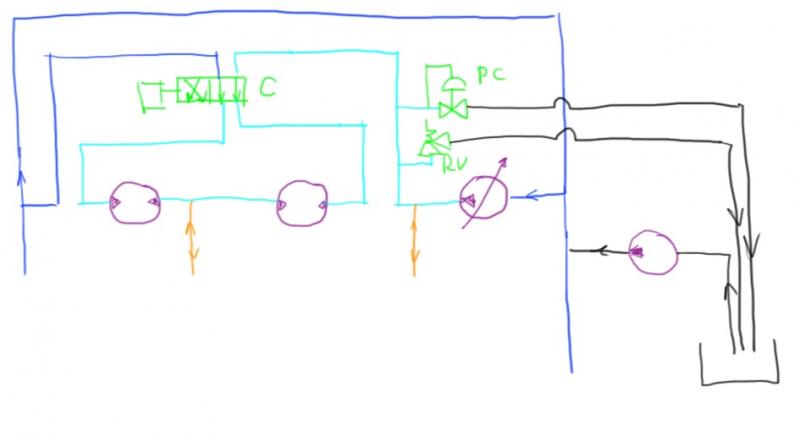
Natuurlijk is dit schema nog lang niet compleet. Je moet je voertuigsnelheid nog kunnen regelen, en een voor- en achteruit schakeling maken.
En je moet je niet vergissen in de complexiteit van een hydraulisch systeem, er komen nog allerlei dingen bij, zoals filters, koeling, oliereservoir, drukbeveiliging, olieaanvulregeling enz.
Max.
 Mooi principe.
Mooi principe.
")