Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
borstelloze experimenten
- Topicstarter gertjan
- Startdatum
Graag gedaan, ik heb er zelf ook plezier in.Gertjan, bedankt voor deze test!
Tsja... dat zou best wel handig zijn.... maar dit soort dingen kost me veel te veel tijd. Tijd die ik liever aan verdere experimenten besteed. En ik moet ook aan mijn gezondheid denken.Ik denk dat het ook handig is dat je dit in het engels vermeld in bijv die 55 pagina's+ thread op de ezone.
Is er iemand die er wel plezier in heeft om het te vertalen en daar te plaatsen?
Jij misschien Niek?
ron van sommeren
Forum veteraan
@Niek & @Gert-Jan
Ik zal de conclusies in die thread plaatsen.
Ik zal de conclusies in die thread plaatsen.
Update borstelloze experimenten sinds het vorige bericht:
Pibros met zelfbouw brushless motor: ik ben na 10+ vluchten") tevreden over deze motor. Door de flexibele ophanging geen last van vibraties. Vergeleken met de S400 die er eerst opzat: de motor wordt niet te heet, ik heb wat meer vliegtijd, en wat meer power. Kan nu met volle accu ongeveer 50m recht omhoog, dan trekt hij het niet meer. Maar ja, wat wil je van een motortje van 42 gram…
tevreden over deze motor. Door de flexibele ophanging geen last van vibraties. Vergeleken met de S400 die er eerst opzat: de motor wordt niet te heet, ik heb wat meer vliegtijd, en wat meer power. Kan nu met volle accu ongeveer 50m recht omhoog, dan trekt hij het niet meer. Maar ja, wat wil je van een motortje van 42 gram…
Verdere experimenten aan het motortje:
WIKKELINGEN: (opgegeven per spoel, en T=turns =windingen.)
origineel zit er op dit ankertje 33Tx0,41mmØ, in driehoek geschakeld.
In plaats daarvan heb ik gewikkeld 19Tx0,6mmØ, in ster geschakeld. (TY =T∆ / √3)
Dit presteert ook inderdaad gelijk aan het originele anker.
20T geprobeerd, motor is nu te tam voor 8cellen.
18T: Misfire treed op bij volgas en de stroom is te hoog. (motor wordt te heet)
Dikker draad geprobeerd; 0,7mmØ, maar nu passen er maximaal 17T op, dat is te weinig.
0,67mmØ: 19T past er net op. Het motortje wordt nu iets minder heet.
VOORDELEN VAN STERSCHAKELING:
Omdat je minder wikkelingen ( / √3):nodig hebt, kun je dikker draad gebruiken.
Dat heeft weer als voordeel dat er minder wikkelingen per spoel op hoeven, dat vergemakkelijkt het tellen, en je bent sneller en netter klaar.
Dikker draad (0,6mmØ) rekt ook bijna niet meer uit tijdens het wikkelen. De lengte van de draad is nu wel een redelijk betrouwbare maat voor het aantal wikkelingen.
TWEE GELIJKE MOTOREN OP EEN BRUSHLESS/SENSORLESS REGELAAR.
Ik had uit betrouwbare bron vernomen dat het mogelijk moest zijn om twee gelijke motoren op één brushless sensorless regelaar te laten functioneren.
Daar kan ik kort over zijn: bij mij werkte het niet. Eén van beide (dan weer de één, dan weer de andere) motoren loopt goed aan, maar de ander blijft dan altijd flink achter in toerental, en de regelaar kapt het af na een paar seconden.
Wie heeft hier ervaring mee?
2-POOL ROTOR
Tot nu toe heb ik alle proeven gedaan met een 4-pool rotor. (N-Z-N-Z het kringetje rond)
Ik was benieuwd naar de eigenschappen met een 2-pool rotor op dit anker.
Dus van een van de twee rotors in de aceton gezet en na enige tijd kon ik de magneten eraf pakken.
Nu twee groepen van 6 magneten in gelijmd. (N-Z het kringetje rond) Elke van de twee groepen is één pool.
Algemene observaties: Het motortje wil graag héél veel toeren maken. Het koppel is lager dan met 4P rotor.
Minimale neiging tot vibraties, geen misfire, wel wat moeilijk aanlopend bij lagere voedingsspanning.
Lijkt mij ideaal voor impeller gebruik.
-2x6 magn.= 37% magneet bedekking; onbelast: 41520rpm @9V en 1,2A. Belast met prop 5,5x4@6V: 13560rpm, 16A, berekend motorrendement: 50%. Opstartproblemen tot 6V
-2x8 magn.= 49% magneet bedekking; onbelast: 39060rpm @9V en 1,2A. Belast met prop 5,5x4@6V: 13710rpm, 14A, berekend motorrendement: 59%. Opstartproblemen tot 7V
-2x10 magn.= 62% magneet bedekking; onbelast: 37260rpm @9V en 1,2A. Belast met prop 5,5x4@6V: 13590rpm, 11,3A, berekend motorrendement: 71%. Opstartproblemen tot10V
-2x12 magn.= 74% magneet bedekking; onbelast: 36420rpm @9V en 1A. Belast met prop gaat het opstarten geheel niet.
-2x14 magn.= 87% magneet bedekking; onbelast: 35160rpm @9V en 1,1A. Belast met prop 5,5x4@6V: 13860rpm, 12,4A, berekend motorrendement: 69%. Opstartproblemen tot 8V
-2x16 magn.= 99% magneet bedekking; onbelast: 34380rpm @9V en 1,1A. Belast met prop 5,5x4@6V: 14400rpm, 12,8A, berekend motorrendement: 74,7%. Opstartproblemen tot 7,5V
Ook hier gaf het maximaal aantal magneten in de rotor het hoogste rendement.
Géén misfire bij hoge belasting, wel opstart problemen.
Beschrijving opstart problemen 2-pool rotor belast met prop: De motor loopt wel direct aan tot zo’n 4000rpm, zakt dan terug tot zo’n 2000rpm, loopt weer op tot zo’n4000rpm, zakt weer terug…enz. tot na ongeveer 10 sec. de regelaar het opgeeft.
De 2x16 rotor met prop 5,5x4 in de pibros uitgeprobeerd: Het vliegt goed, maar er is minder power, en de accu is veel sneller leeg.
Pibros met zelfbouw brushless motor: ik ben na 10+ vluchten
tevreden over deze motor. Door de flexibele ophanging geen last van vibraties. Vergeleken met de S400 die er eerst opzat: de motor wordt niet te heet, ik heb wat meer vliegtijd, en wat meer power. Kan nu met volle accu ongeveer 50m recht omhoog, dan trekt hij het niet meer. Maar ja, wat wil je van een motortje van 42 gram…Verdere experimenten aan het motortje:
WIKKELINGEN: (opgegeven per spoel, en T=turns =windingen.)
origineel zit er op dit ankertje 33Tx0,41mmØ, in driehoek geschakeld.
In plaats daarvan heb ik gewikkeld 19Tx0,6mmØ, in ster geschakeld. (TY =T∆ / √3)
Dit presteert ook inderdaad gelijk aan het originele anker.
20T geprobeerd, motor is nu te tam voor 8cellen.
18T: Misfire treed op bij volgas en de stroom is te hoog. (motor wordt te heet)
Dikker draad geprobeerd; 0,7mmØ, maar nu passen er maximaal 17T op, dat is te weinig.
0,67mmØ: 19T past er net op. Het motortje wordt nu iets minder heet.
VOORDELEN VAN STERSCHAKELING:
Omdat je minder wikkelingen ( / √3):nodig hebt, kun je dikker draad gebruiken.
Dat heeft weer als voordeel dat er minder wikkelingen per spoel op hoeven, dat vergemakkelijkt het tellen, en je bent sneller en netter klaar.
Dikker draad (0,6mmØ) rekt ook bijna niet meer uit tijdens het wikkelen. De lengte van de draad is nu wel een redelijk betrouwbare maat voor het aantal wikkelingen.
TWEE GELIJKE MOTOREN OP EEN BRUSHLESS/SENSORLESS REGELAAR.
Ik had uit betrouwbare bron vernomen dat het mogelijk moest zijn om twee gelijke motoren op één brushless sensorless regelaar te laten functioneren.
Daar kan ik kort over zijn: bij mij werkte het niet. Eén van beide (dan weer de één, dan weer de andere) motoren loopt goed aan, maar de ander blijft dan altijd flink achter in toerental, en de regelaar kapt het af na een paar seconden.
Wie heeft hier ervaring mee?
2-POOL ROTOR
Tot nu toe heb ik alle proeven gedaan met een 4-pool rotor. (N-Z-N-Z het kringetje rond)
Ik was benieuwd naar de eigenschappen met een 2-pool rotor op dit anker.
Dus van een van de twee rotors in de aceton gezet en na enige tijd kon ik de magneten eraf pakken.
Nu twee groepen van 6 magneten in gelijmd. (N-Z het kringetje rond) Elke van de twee groepen is één pool.
Algemene observaties: Het motortje wil graag héél veel toeren maken. Het koppel is lager dan met 4P rotor.
Minimale neiging tot vibraties, geen misfire, wel wat moeilijk aanlopend bij lagere voedingsspanning.
Lijkt mij ideaal voor impeller gebruik.
-2x6 magn.= 37% magneet bedekking; onbelast: 41520rpm @9V en 1,2A. Belast met prop 5,5x4@6V: 13560rpm, 16A, berekend motorrendement: 50%. Opstartproblemen tot 6V
-2x8 magn.= 49% magneet bedekking; onbelast: 39060rpm @9V en 1,2A. Belast met prop 5,5x4@6V: 13710rpm, 14A, berekend motorrendement: 59%. Opstartproblemen tot 7V
-2x10 magn.= 62% magneet bedekking; onbelast: 37260rpm @9V en 1,2A. Belast met prop 5,5x4@6V: 13590rpm, 11,3A, berekend motorrendement: 71%. Opstartproblemen tot10V
-2x12 magn.= 74% magneet bedekking; onbelast: 36420rpm @9V en 1A. Belast met prop gaat het opstarten geheel niet.
-2x14 magn.= 87% magneet bedekking; onbelast: 35160rpm @9V en 1,1A. Belast met prop 5,5x4@6V: 13860rpm, 12,4A, berekend motorrendement: 69%. Opstartproblemen tot 8V
-2x16 magn.= 99% magneet bedekking; onbelast: 34380rpm @9V en 1,1A. Belast met prop 5,5x4@6V: 14400rpm, 12,8A, berekend motorrendement: 74,7%. Opstartproblemen tot 7,5V
Ook hier gaf het maximaal aantal magneten in de rotor het hoogste rendement.
Géén misfire bij hoge belasting, wel opstart problemen.
Beschrijving opstart problemen 2-pool rotor belast met prop: De motor loopt wel direct aan tot zo’n 4000rpm, zakt dan terug tot zo’n 2000rpm, loopt weer op tot zo’n4000rpm, zakt weer terug…enz. tot na ongeveer 10 sec. de regelaar het opgeeft.
De 2x16 rotor met prop 5,5x4 in de pibros uitgeprobeerd: Het vliegt goed, maar er is minder power, en de accu is veel sneller leeg.
Ik heb een nieuw brushless motortje gebouwd.
Gisteren eerste tests gedaan. en ben weer verbaasd over het hoge vermogen en rendement ervan.
Loopt heel mooi zonder trillingen.
weegt 85 gram.


Ik heb een foto verslag op mijn site gezet, zie
http://www.solcon.nl/gjkool/brushlessNL4.html
Gisteren eerste tests gedaan. en ben weer verbaasd over het hoge vermogen en rendement ervan.
Loopt heel mooi zonder trillingen.
weegt 85 gram.
Ik heb een foto verslag op mijn site gezet, zie
http://www.solcon.nl/gjkool/brushlessNL4.html
ron van sommeren
Forum veteraan
Mooie motor Gert-Jan Zeer inventief en low budget. Als jij volgend jaar op 22 juni niet naar onze Nijmegen/Winssen elektro fly-in komt met je motoren, zal ik je persoonlijk in Veenendaal ophalen, ik heb je adres ")
Wat is bij jouw meting Pin? Het vermogen dat van de accu de regelaar ingaat of het vermogen dat van de regelaar naar de motor gaat? Bij borstelloze motoren wordt het rendement op de eerste manier gemeten, eigenlijk is het dan het rendement van de motor/regelaar combinatie.
Zeer inventief en low budget. Als jij volgend jaar op 22 juni niet naar onze Nijmegen/Winssen elektro fly-in komt met je motoren, zal ik je persoonlijk in Veenendaal ophalen, ik heb je adres Wat is bij jouw meting Pin? Het vermogen dat van de accu de regelaar ingaat of het vermogen dat van de regelaar naar de motor gaat? Bij borstelloze motoren wordt het rendement op de eerste manier gemeten, eigenlijk is het dan het rendement van de motor/regelaar combinatie.
ron van sommeren
Forum veteraan
Op www.handlaunchglider.de staan handleidingen voor het bouwen/wikkelen/assembleren (windingsdiagrammen!!!) van een zogenaamde 'mini' zoals die van Gert-Jan, met zeer instructieve vergrootbare foto's. Let op, er staat 'mini-lrk' maar dat is onjuist. Deze motor gebruikt de klassieke wikkeling en niet de lrk-wikkeling. Het begrip is ingeburgerd bij onze Oosterburen en stamt nog uit de tijd dat nog niet duidelijk was hoe het lrk-principe werkt. Het is dus geen bewuste misleiding, hoogstens verwarrend. Ik verwijs er steeds naar met de naam 'mini', zonder de toevoeging 'lrk'. Mini's maken graag wat meer toeren en hebben een lager koppel dan echte lrk's. Ondanks het lagere koppel zijn ze nog steeds geschikt voor direct-drive.
De handleidingen:
Duitse versie
http://bilder.handlaunchglider.de/?dir=Bauanleitungen-building instructiones/Mini-LRK&lang=de
Engelse versie
http://bilder.handlaunchglider.de/?dir=Bauanleitungen-building instructiones/Mini-LRK&lang=en
De handleidingen:
Duitse versie
http://bilder.handlaunchglider.de/?dir=Bauanleitungen-building instructiones/Mini-LRK&lang=de
Engelse versie
http://bilder.handlaunchglider.de/?dir=Bauanleitungen-building instructiones/Mini-LRK&lang=en
Gertjan,
Ik ben ook drukdoende met experimenteren met brushless motoren. Ik ben begonnen met de mini LRK en daarna heb ik diverse motoren gemaakt die van cd ankers afgeleid zijn. Mijn laatste experiment betreft een motoer warbij ik drie ankers van cd motoeren samengevoegd heb(totaal 15 mm). De benodigde mageneten heb ik uit enkele harddisks gehaald, ingeslepen en gebroken. Het verbaast mij hoe makkelijk deze motor een prop 14 x 7 trekt. De motor weegt 47 gram en trekt ca 6 amp. bij 14*7. Vandaag heb ik de motor op een tiny van 1 mtr geprobeerd en dit viel tegen tov de mini lrk met een 12*8 prop.
Het verbaasd mij dat jij zo'n gigantisch hoog toerental haalt. Mijn brushless motoren komen niet boven de 6500 toeren.
Heb jij misschien een idee waar dit aan ligt?
Ik ben ook drukdoende met experimenteren met brushless motoren. Ik ben begonnen met de mini LRK en daarna heb ik diverse motoren gemaakt die van cd ankers afgeleid zijn. Mijn laatste experiment betreft een motoer warbij ik drie ankers van cd motoeren samengevoegd heb(totaal 15 mm). De benodigde mageneten heb ik uit enkele harddisks gehaald, ingeslepen en gebroken. Het verbaast mij hoe makkelijk deze motor een prop 14 x 7 trekt. De motor weegt 47 gram en trekt ca 6 amp. bij 14*7. Vandaag heb ik de motor op een tiny van 1 mtr geprobeerd en dit viel tegen tov de mini lrk met een 12*8 prop.
Het verbaasd mij dat jij zo'n gigantisch hoog toerental haalt. Mijn brushless motoren komen niet boven de 6500 toeren.
Heb jij misschien een idee waar dit aan ligt?
Geert zei:Mijn brushless motoren komen niet boven de 6500 toeren.
Heb jij misschien een idee waar dit aan ligt?
regelaar?
@ Ron:

--Mijn meting van Pin is het vermogen dat van de voeding de regelaar ingaat. Dit is inderdaad het rendement van motor/regelaar combinatie.
--Het klopt dat dit een motor naar het principe "mini lrk" is, ik was vergeten dat erbij te vermelden. Het is inderdaad ook geen LRK. Bedankt Ron, voor je aanvullingen en links.
@ Geert:
Ook mogelijk is 6:10, dit geeft een lager toerental en een hoger koppel. Wel moet het anker dan anders gewikkeld worden.
Verder is 6:4 ook een mogelijkheid, waarbij vermoedelijk toerentallen gehaald worden die alleen nog maar voor impellers bruikbaar zijn. Hier kan hetzelfde wikkelschema als bij 6:8 gebruikt worden.
Het aantal wikkelingen kan ook van invloed zijn. Minder wikkelingen en dikker draad zorgen voor hogere toerentallen, waarbij je de motor ook de kans moet geven om sneller te kunnen lopen, door een kleinere prop te monteren.
Wat voor regelaar gebruik jij? Hoeveel wikkelingen, magneet- en anker-polen? Heb je ook wat foto's van jou motoren?
--Goeie service Ron! Haal je Geert dan ook op?zal ik je persoonlijk in Veenendaal ophalen
--Mijn meting van Pin is het vermogen dat van de voeding de regelaar ingaat. Dit is inderdaad het rendement van motor/regelaar combinatie.
--Het klopt dat dit een motor naar het principe "mini lrk" is, ik was vergeten dat erbij te vermelden. Het is inderdaad ook geen LRK. Bedankt Ron, voor je aanvullingen en links.
@ Geert:
Dat jij dat niet haalt, maar wel meer koppel hebt kan onder andere liggen aan de verhouding aantal ankerpolen tot aantal magneetpolen. Voor deze mini heb ik gekozen voor de verhouding 6:8.Het verbaasd mij dat jij zo'n gigantisch hoog toerental haalt
Ook mogelijk is 6:10, dit geeft een lager toerental en een hoger koppel. Wel moet het anker dan anders gewikkeld worden.
Verder is 6:4 ook een mogelijkheid, waarbij vermoedelijk toerentallen gehaald worden die alleen nog maar voor impellers bruikbaar zijn. Hier kan hetzelfde wikkelschema als bij 6:8 gebruikt worden.
Het aantal wikkelingen kan ook van invloed zijn. Minder wikkelingen en dikker draad zorgen voor hogere toerentallen, waarbij je de motor ook de kans moet geven om sneller te kunnen lopen, door een kleinere prop te monteren.
Wat voor regelaar gebruik jij? Hoeveel wikkelingen, magneet- en anker-polen? Heb je ook wat foto's van jou motoren?
ron van sommeren
Forum veteraan
Hallo Geert, zou je wat foto's kunnen posten?
Zoals Gert-Jan schreef, het kan normaal gedrag zijn, toerental en koppel worden bepaald door de motor magneet en stator geometrie en het aantal wikkelingen.
Wat gebeurt er bij 6500 toeren, stopt de motor, gaat hij stotteren? Dat mag niet. Zoek eens in dit forum op cd-rom en lrk, er staan verschillende mogelijke oorzaken voor dit probleem in beschreven. En ook links naar zelfbouw threads en sites. Heb je kleinere props geprobeerd? Bij te grote props loopt de rotor te veel achter bij het draaiveld en kan de regelaar niet meer synchroniseren.
Mailing list in mijn onderschrift al gezien? Op die site staat ook een aantal links en een faq. Ik ben bezig met een nieuwe faq, met meer cd-rom links. Stuur me even een berichtje met je e-mail adres dan zal ik hem sturen.
Zoals Gert-Jan schreef, het kan normaal gedrag zijn, toerental en koppel worden bepaald door de motor magneet en stator geometrie en het aantal wikkelingen.
Wat gebeurt er bij 6500 toeren, stopt de motor, gaat hij stotteren? Dat mag niet. Zoek eens in dit forum op cd-rom en lrk, er staan verschillende mogelijke oorzaken voor dit probleem in beschreven. En ook links naar zelfbouw threads en sites. Heb je kleinere props geprobeerd? Bij te grote props loopt de rotor te veel achter bij het draaiveld en kan de regelaar niet meer synchroniseren.
Mailing list in mijn onderschrift al gezien? Op die site staat ook een aantal links en een faq. Ik ben bezig met een nieuwe faq, met meer cd-rom links. Stuur me even een berichtje met je e-mail adres dan zal ik hem sturen.
ron van sommeren
Forum veteraan
CD-ROM site van Henning Stoecklein:
http://mitglied.lycos.de/hestoeck/
Idem lrk/cd-rom site van Karsten Camlot:
http://www.kc-world.de/
http://mitglied.lycos.de/hestoeck/
Idem lrk/cd-rom site van Karsten Camlot:
http://www.kc-world.de/
ron van sommeren
Forum veteraan
gertjan zei:... Heeft iemand ervaring met 2 of meer gelijke motoren op één brushless/sensorless regelaar? ...
In de fora van www.ezonemag.com, www.rcline.de en www.rc-network.de is er over gediscussieerd. De resultaten zijn blijkbaar wisselend. Het kan gaan mits er weinig verschil in de motoren (en props!) zit. Geen zware (massa) props gebruiken. Bij zelfbouw zullen de onderlinge verschillen tussen motoren wat groter zijn dan bij industriëel vervaardigde motoren. Van twee lrk's op één regelaar heb ik nog niets gelezen.


ron van sommeren
Forum veteraan
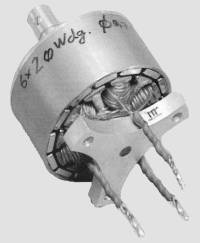
Geert, je hebt nog ruimte genoeg tussen de polen. Als je tevreden bent met de motorkarakteristiek (wordt bepaald door aantal windingen en ster-driehoek keuze) moet je deze ruimte zoveel mogelijk opvullen door dikkere draad te gebruiken of door meerdere draden parallel te wikkelen. Als het even kan een enkele draad, dat geeft de beste vulling. Hoe meer koper, hoe lager de ohmse weerstand (Ri) van de motor. Het rendement van de motor stijgt en de motor wordt nog minder warm.
Je zou de resultaten van je metingen eens in het 'elektromotoren' forum van www.rcline.de kunnen posten, zij kunnen je wel zeggen hoe goed of slecht jouw motor er uit springt, veel meer ervaring daar. Nog wel ...
Informeer voor draad eens bij een motorbedrijf. Klosje(s) meenemen om draad op te wikkelen.
Op de foto nog een tweetal wikkeltips.

Je zou de resultaten van je metingen eens in het 'elektromotoren' forum van www.rcline.de kunnen posten, zij kunnen je wel zeggen hoe goed of slecht jouw motor er uit springt, veel meer ervaring daar. Nog wel ...
Informeer voor draad eens bij een motorbedrijf. Klosje(s) meenemen om draad op te wikkelen.
Op de foto nog een tweetal wikkeltips.
ron van sommeren
Forum veteraan
Ik zie dat Geert in Eersel woont, dat is me te gortiggertjan zei:... Goeie service Ron! Haal je Geert dan ook op?
. Geert moet t.z.t. maar samen met Jan Scholten naar Winssen komen. Een gezellig Eindhovens/Kempens onderonsje in de auto ron van sommeren
Forum veteraan
@Gert-Jan
Ik denk dat jouw motor nog wel wat lichter gemaakt zou kunnen worden. De statordrager uit aluminium i.p.v. staal maken, de drager zou kleiner/korter en ter hoogte van het motorschot dunner kunnen zijn.
Hoe arrêteer je de as achter het achterste lager, met een seeger-ring of G-clip?
Ik denk dat jouw motor nog wel wat lichter gemaakt zou kunnen worden. De statordrager uit aluminium i.p.v. staal maken, de drager zou kleiner/korter en ter hoogte van het motorschot dunner kunnen zijn.
Hoe arrêteer je de as achter het achterste lager, met een seeger-ring of G-clip?