Komt ook een Gemmeke naar Herentals hoor .
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Gem van Topmodel
- Topicstarter prop-er
- Startdatum
Komt ook een Gemmeke naar Herentals hoor .
Heeft Johnny (ben niet zeker van de naam) er ook één gekocht ?
Dan ga ik dat kistje inderdaad zeker wel eens zien vliegen.
nee, maar zijn vriend Dirk, je moet hem kennen hoor
Johnny koopt meer DUVELS
Johnny koopt meer DUVELS
prop-er
Forum veteraan
Ha die Berrie. Hou me maar scherp, hoor! Ik zit nog dagelijks over je Aufwinds te kwijlen. (maak je geen zorgen, we hebben tegenwoordig altijd kwijldoekjes in de buurt liggen...)
De topmodel GEM heeft in totaal zes servo's. Om op de helling het landen eenvoudiger te maken, wil ik de butterfly instelling gebruiken. Om dat goed te doen, heb je eigenlijk een zender nodig met meer dan 6 kanalen, maar ik heb even niets anders.
Ik heb mijn MX-12 nu zo ingesteld:
Ontvangerbezetting:
B: Aansluiting voor de 3/5A switching UBEC.
1: 40A Regelaar. (rode draad buiten werking gesteld)
2: Aileron
3. Hoogte (via V-tail instelling)
4. Richting (via V-tail instelling)
5. Flaps (twee servo's met Y-kabel)
6. Aileron
De twee servo's van de flaps zijn gespiegeld gemonteerd, en als je deze op een Y-kabel aansluit, en op 1 kanaal van je ontvanger zet, gaan de roeren tegengesteld bewegen. Omdat de flaps samen omhoog/omlaag moeten bewegen, heb ik 1 servo opengemaakt en omgepoold (+/- aansluitingen op de potmeter en op de motor omwisselen).
Wat eventueel nog kan:
- linkerstick (ik vlieg mode 2) laten functioneren als variabele butterfly, en de motor op een aparte switch (aan/uit). Hiervoor moeten de flaps op kanaal 1, en de motor op kanaal 5.
Nadeel van de huidige constructie:
- De flaps kunnen niet met de ailerons worden megemixt om de roleigenschappen te verbeteren.
Ik heb intussen een kunststofbuis in de romp gelegd om de antenne van de ontvanger doorheen te trekken. Een reikwijdte test moet later uitwijzen of de twee stalen bowdenkabels naar de V-staart voor storing in de ontvangst kunnen zorgen.
De nieuwe set propbladen zijn binnen, en ik kon een passend setje bladen samenstellen. De prop is gemonteerd en ik heb even buiten proefgedraaid. Op een 3200mah 3S pack doet deze 1000kV motor met een 12x8 klapprop 41A. De regelaar is 40A, maar ik verwacht geen problemen.
Er zit een afdekkapje over de motordraden die buiten de romp lopen. Deze is in de kleur van de romp geverfd. Ik ben hier nog niet geheel tevreden over, en ben dus opnieuw aan het werk geslagen.

De stekkerverbindingen naar de vleugels zijn met een tweetal groene 6 pools hoogstroomstekkers gemaakt.

De lipo zit muurvast met twee zware velcrobanden, voorzien van een stevige (en vreselijk handige) gesp. Waarom heb ik dat nooit eerder zo gedaan?

Alle servo's staan nu goed in de zender ingesteld. Ik heb twee butterfly standen ingesteld op mijn MX-12.
Inmiddels heb ik een nieuwe 200W lader met balancer, geschikt voor A123. Ik kan hiermee de A123's met 10A laden, waardoor je met een kwartiertje weer volle accu's hebt.
met balancer, geschikt voor A123. Ik kan hiermee de A123's met 10A laden, waardoor je met een kwartiertje weer volle accu's hebt.
De lipo die nu in de GEM zit, zal op termijn weer terug gaan in de (hopelijk binnenkort gerepareerde) Rainbow, waarna de GEM een A123 pack zal krijgen. Na enig speurwerk met de antriebsrechner kom ik uit op een 4S A123 met een 11x8. Ik ga dan van 1950 gram naar 1790 gram stuwkracht, en van 77 naar 86 km/u. (het kan nooit snel genoeg) Het stroomverbruik daalt naar 36A. Het gewicht neemt slechts 8 gram toe. Ik lever WOT zo'n 45 seconden in, naar 3,5 minuten.
Ik had bij Bidproduct een 8 kanaals synth ontvanger besteld. Na twee maanden nog niets ontvangen, dus boden ze aan opnieuw te versturen of geld terug te geven. Ik koos voor de refund, en kreeg een dag later keurig mijn geld terug, waarmee ik bij HC direct een corona 8K bestelde. Vijf dagen later ontvang ik van Bidproduct alsnog een nieuwe ontvanger. (nieuw verstuurd)
Keurig een mailtje naar bidproduct gestuurd dat ze een foutje hadden gemaakt, en vroeg om instructies om het van hun ontvangen geld weer richting Hong Kong te sturen. En wat doen ze? (.....) ze sturen opnieuw een ontvanger op...
Nu heb ik dus drie 8K synth ontvangers... (Ik heb bidproduct natuurlijk wel netjes het geld teruggestort)
Ik heb dus niet stilgezeten, maar het had van mij allemaal wel wat sneller mogen gaan met de GEM.")
De schuldige is een nieuwe 1,5m Fox. Die krijgt pitcheron vleugels. Ik heb na lang onderzoek een nieuw type linkage verzonnen, waarmee ik een mechanische expo bewerkstellig. (klinkt alsof dat eenvoudig te verwezenlijken is, maar dat is het dus echt niet) Zo maak ik optimaal gebruik van de aanwezige resolutie van de servo in het kleine gebied tussen de -2 en +2° hoekverdraaiing van de vleugels. Klinkt allemaal wat cryptisch, maar zodra ik het ontwerp helemaal klaar heb zal ik een en ander toelichten in het draadje van de Orca...
Vincent
De topmodel GEM heeft in totaal zes servo's. Om op de helling het landen eenvoudiger te maken, wil ik de butterfly instelling gebruiken. Om dat goed te doen, heb je eigenlijk een zender nodig met meer dan 6 kanalen, maar ik heb even niets anders.
Ik heb mijn MX-12 nu zo ingesteld:
Ontvangerbezetting:
B: Aansluiting voor de 3/5A switching UBEC.
1: 40A Regelaar. (rode draad buiten werking gesteld)
2: Aileron
3. Hoogte (via V-tail instelling)
4. Richting (via V-tail instelling)
5. Flaps (twee servo's met Y-kabel)
6. Aileron
De twee servo's van de flaps zijn gespiegeld gemonteerd, en als je deze op een Y-kabel aansluit, en op 1 kanaal van je ontvanger zet, gaan de roeren tegengesteld bewegen. Omdat de flaps samen omhoog/omlaag moeten bewegen, heb ik 1 servo opengemaakt en omgepoold (+/- aansluitingen op de potmeter en op de motor omwisselen).
Wat eventueel nog kan:
- linkerstick (ik vlieg mode 2) laten functioneren als variabele butterfly, en de motor op een aparte switch (aan/uit). Hiervoor moeten de flaps op kanaal 1, en de motor op kanaal 5.
Nadeel van de huidige constructie:
- De flaps kunnen niet met de ailerons worden megemixt om de roleigenschappen te verbeteren.
Ik heb intussen een kunststofbuis in de romp gelegd om de antenne van de ontvanger doorheen te trekken. Een reikwijdte test moet later uitwijzen of de twee stalen bowdenkabels naar de V-staart voor storing in de ontvangst kunnen zorgen.
De nieuwe set propbladen zijn binnen, en ik kon een passend setje bladen samenstellen. De prop is gemonteerd en ik heb even buiten proefgedraaid. Op een 3200mah 3S pack doet deze 1000kV motor met een 12x8 klapprop 41A. De regelaar is 40A, maar ik verwacht geen problemen.
Er zit een afdekkapje over de motordraden die buiten de romp lopen. Deze is in de kleur van de romp geverfd. Ik ben hier nog niet geheel tevreden over, en ben dus opnieuw aan het werk geslagen.
De stekkerverbindingen naar de vleugels zijn met een tweetal groene 6 pools hoogstroomstekkers gemaakt.
De lipo zit muurvast met twee zware velcrobanden, voorzien van een stevige (en vreselijk handige) gesp. Waarom heb ik dat nooit eerder zo gedaan?
Alle servo's staan nu goed in de zender ingesteld. Ik heb twee butterfly standen ingesteld op mijn MX-12.
Inmiddels heb ik een nieuwe 200W lader
met balancer, geschikt voor A123. Ik kan hiermee de A123's met 10A laden, waardoor je met een kwartiertje weer volle accu's hebt. De lipo die nu in de GEM zit, zal op termijn weer terug gaan in de (hopelijk binnenkort gerepareerde) Rainbow, waarna de GEM een A123 pack zal krijgen. Na enig speurwerk met de antriebsrechner kom ik uit op een 4S A123 met een 11x8. Ik ga dan van 1950 gram naar 1790 gram stuwkracht, en van 77 naar 86 km/u. (het kan nooit snel genoeg) Het stroomverbruik daalt naar 36A. Het gewicht neemt slechts 8 gram toe. Ik lever WOT zo'n 45 seconden in, naar 3,5 minuten.
Ik had bij Bidproduct een 8 kanaals synth ontvanger besteld. Na twee maanden nog niets ontvangen, dus boden ze aan opnieuw te versturen of geld terug te geven. Ik koos voor de refund, en kreeg een dag later keurig mijn geld terug, waarmee ik bij HC direct een corona 8K bestelde. Vijf dagen later ontvang ik van Bidproduct alsnog een nieuwe ontvanger. (nieuw verstuurd)
Keurig een mailtje naar bidproduct gestuurd dat ze een foutje hadden gemaakt, en vroeg om instructies om het van hun ontvangen geld weer richting Hong Kong te sturen. En wat doen ze? (.....) ze sturen opnieuw een ontvanger op...
Nu heb ik dus drie 8K synth ontvangers... (Ik heb bidproduct natuurlijk wel netjes het geld teruggestort)
Ik heb dus niet stilgezeten, maar het had van mij allemaal wel wat sneller mogen gaan met de GEM.
De schuldige is een nieuwe 1,5m Fox. Die krijgt pitcheron vleugels. Ik heb na lang onderzoek een nieuw type linkage verzonnen, waarmee ik een mechanische expo bewerkstellig. (klinkt alsof dat eenvoudig te verwezenlijken is, maar dat is het dus echt niet) Zo maak ik optimaal gebruik van de aanwezige resolutie van de servo in het kleine gebied tussen de -2 en +2° hoekverdraaiing van de vleugels. Klinkt allemaal wat cryptisch, maar zodra ik het ontwerp helemaal klaar heb zal ik een en ander toelichten in het draadje van de Orca...
Vincent
Laatst bewerkt:
Fotor
Forum veteraan
MX-16 nodig??Om dat goed te doen, heb je eigenlijk een zender nodig met meer dan 6 kanalen, maar ik heb even niets anders.
Is hij nu helemaal klaar voor de eerste vlucht?

Ik heb dus niet stilgezeten, maar het had van mij allemaal wel wat sneller mogen gaan met de GEM.
Je hebt idd niet stil gezeten! Leuk om te zien waar je allemaal me bezig bent.
Ik ben met name erg, zo niet HEEL ERG, benieuwd naar je ervaringen met de A123 cellen.
Ik ben afgelopen jaar namelijk niet erg gelukkig geworden van mijn Lipo's. Of dat nu komt doordat ik niet goed omgegaan ben met de balancer of dat de balancer niet goed was weet ik niet. Maar de wens voor een veel minder kritische (lees hufter proof) accu is aanmerkelijk sterker geworden

prop-er
Forum veteraan
Arjan, bedankt voor de goede tip!
@Berrie: ik denk dat je vrij probleemloos over kunt stappen naar A123, hoor, maar ook die cellen zullen af en toe gebalanceerd moeten worden. Ik heb nu een "el cheapo" ladertje die zo'n beetje alles kan wat ik maar kan verzinnen (LiXX, NiXX, PB, 10A laden, ontladen, balancen, 60% opslag, temp sensor, usb voor PC uitlezing, etc.) voor omgerekend €58,-. Ik heb na het balanceren van een lipo pack de voltages gecheckt, en deze waren tot en met twee cijfers achter de komma identiek.
http://www.hobbycity.com/hobbycity/...e=GT_A-6-10_200W_Balance_charger_&_discharger
Ik zal binnenkort de vier A123 cellen en nieuwe propbladen even
aanschaffen.
Vincent
@Berrie: ik denk dat je vrij probleemloos over kunt stappen naar A123, hoor, maar ook die cellen zullen af en toe gebalanceerd moeten worden. Ik heb nu een "el cheapo" ladertje die zo'n beetje alles kan wat ik maar kan verzinnen (LiXX, NiXX, PB, 10A laden, ontladen, balancen, 60% opslag, temp sensor, usb voor PC uitlezing, etc.) voor omgerekend €58,-. Ik heb na het balanceren van een lipo pack de voltages gecheckt, en deze waren tot en met twee cijfers achter de komma identiek.
http://www.hobbycity.com/hobbycity/...e=GT_A-6-10_200W_Balance_charger_&_discharger
Ik zal binnenkort de vier A123 cellen en nieuwe propbladen even
aanschaffen.
Vincent
prop-er
Forum veteraan

Ik heb de A123 cellen binnen! Wat een joekels. Op de foto zie je een AAA celletje ter vergelijking. Bij Lindinger heb ik een 4S balanceerkabeltje en een meter krimpfolie gekocht. Nu de boel nog in elkaar zetten.

Dit is de ontvanger die ik bij Bidproduct heb gekocht. Een 8 kanaals synthesized. De behuizing is anders als de Corona, die ik ook heb liggen.
Ik heb eindelijk de ailerons goed staan. Ik was ontevreden over de nauwkeurigheid van het meten van de uitslag van de vier grote roeren. Ik heb met Rhino even een halfronde schaalverdeling gemaakt, en die op een stuk depron geplakt. Zo heb ik mijn eigen versie van een accuthrow.
De differentiatie van de ailerons bleek verkeerd om te werken. Na het omwisselen van kanaal 2 en 6, en het weer opnieuw programmeren van de diverse instellingen, staat de handel goed.
Ik heb besloten de vleugels te laten voor wat ze zijn. De boel is dusdanig krom / scheef / onnauwkeurig gebouwd, dat een kleine aanpassing van mij het niet mooier zal maken. In de lucht zie je er hopelijk niets van.
Rest mij alleen nog de romp nog weer iets te torderen, omdat de epoxy toch nog iets is gaan zetten, en de V-staart opnieuw scheef staat t.o.v. de vleugels.
En ik moet 12 gram lood in een vleugeltip kwijt zien te raken. (haten jullie dat ook zo, snijden in een maagdelijke vleugeltip...)
Hij is nu echt bijna klaar.
prop-er
Forum veteraan
De GEM heeft in Duitsland op de Weihersberg zijn luchtdoop gehad. De kist bleek goed afgesteld, ik hoefde vrijwel niet te trimmen.
De kist vliegt lekker. Heeft een aangenaam rustige kruissnelheid, en reageert uitstekend op de roeren. Een kleine duik, en hij pikt goed snelheid op. Een snelle pass wordt beloond met prachtig gefluit. Thermiek wordt goed meegepakt, en is duidelijk zichtbaar aan het gedrag van de kist. (geen v-stelling)
Landen gaat prachtig, waarbij de flaps de kist behoorlijk weten af te remmen. Loopings en rollen gaan zonder problemen.
De 400 Watt aandrijving is voldoende voor loodrechte stijgvluchten. (ik prefereer 50-60° stijgvluchten, en vlieg dus vrijwel atijd halfgas omhoog) De 3300mah lipo is voldoende voor een tienrittenkaart omhoog.
Ook al is er geen thermiek, ben je toch al snel een half uur aan 't vliegen.
Na onze vliegvakantie in Duitsland bleek de V-staart doormidden gebroken te zijn. confused De constructie is wat ongelukkig. De boel opnieuw gelijmd, maar na een kleine belastingtest brak het balsa aan de wortel van de staart finaal doormidden. Men heeft hier niet goed nagedacht over de vezelrichting. Ik heb daarom een tweetal gleuven in de staart gefreesd en triplex verbinders ingelijmd. De staart is nu sterk genoeg.
confused De constructie is wat ongelukkig. De boel opnieuw gelijmd, maar na een kleine belastingtest brak het balsa aan de wortel van de staart finaal doormidden. Men heeft hier niet goed nagedacht over de vezelrichting. Ik heb daarom een tweetal gleuven in de staart gefreesd en triplex verbinders ingelijmd. De staart is nu sterk genoeg.
Vanavond nog even gevlogen, waarbij ik uiteindelijk gedwongen werd windje (3-4 bft) mee te landen, aangezien de lipo leeg bleek aan het einde van een rustige low-pass over het veld...:shock::shock::shock:
Kalme bocht gedraaid, net het veld gehaald, en op het laatste moment de flaps er vol op...en toch een prachtige landing.
Al met al ben ik ontzettend tevreden met de GEM, en hoop er nog lang plezier van te hebben!
EDIT: De A123 cellen bleken niet in de romp te passen. (Kom 5mm tekort)
De kist vliegt lekker. Heeft een aangenaam rustige kruissnelheid, en reageert uitstekend op de roeren. Een kleine duik, en hij pikt goed snelheid op. Een snelle pass wordt beloond met prachtig gefluit. Thermiek wordt goed meegepakt, en is duidelijk zichtbaar aan het gedrag van de kist. (geen v-stelling)
Landen gaat prachtig, waarbij de flaps de kist behoorlijk weten af te remmen. Loopings en rollen gaan zonder problemen.
De 400 Watt aandrijving is voldoende voor loodrechte stijgvluchten. (ik prefereer 50-60° stijgvluchten, en vlieg dus vrijwel atijd halfgas omhoog) De 3300mah lipo is voldoende voor een tienrittenkaart omhoog.
Ook al is er geen thermiek, ben je toch al snel een half uur aan 't vliegen.
Na onze vliegvakantie in Duitsland bleek de V-staart doormidden gebroken te zijn.
confused De constructie is wat ongelukkig. De boel opnieuw gelijmd, maar na een kleine belastingtest brak het balsa aan de wortel van de staart finaal doormidden. Men heeft hier niet goed nagedacht over de vezelrichting. Ik heb daarom een tweetal gleuven in de staart gefreesd en triplex verbinders ingelijmd. De staart is nu sterk genoeg.Vanavond nog even gevlogen, waarbij ik uiteindelijk gedwongen werd windje (3-4 bft) mee te landen, aangezien de lipo leeg bleek aan het einde van een rustige low-pass over het veld...:shock::shock::shock:
Kalme bocht gedraaid, net het veld gehaald, en op het laatste moment de flaps er vol op...en toch een prachtige landing.
Al met al ben ik ontzettend tevreden met de GEM, en hoop er nog lang plezier van te hebben!
EDIT: De A123 cellen bleken niet in de romp te passen. (Kom 5mm tekort)
Laatst bewerkt:
Fotor
Forum veteraan
Die fluitende snelle pass heb ik nog steeds in mijn geheugen staan. Ik hoorde de kist voorbij komen en dacht aan een grote schaalbak. Toen ik opkeek zag ik een wit-oranje ding boven de bomen uitkomen (en die andere GEM lag naast me op de grond). "Wow, Vincent gaat lekker!". En dat net na de maiden voyage.
prop-er
Forum veteraan
Iets te overmoedig op de Maasvlakte (niets voor mij...), en de kist gaat al "cartwheelend" de lijzijde van de heuvel af.
Het gevolg:


De staart heeft een aantal barstjes in de gelcoat op ca. een kwart vanaf de vleugel.

Ter hoogte van de canopy zitten ook een aantal scheurtjes.



Eerst maar eens wat gelcoat weg dremelen. En zie daar de ellende die ik aantrof. Overal barsten en scheuren.
Wat me erg tegenvalt is het toegepaste materiaal. Dat is geen glasweefsel, maar meer een soort glasgaas. Het lijkt er op dat de dikke gelcoat het eigenlijk helemaal zelf moet doen, en daar is 'ie niet voor bedoeld. Het lijkt er op dat hier op een verkeerde manier door de fabrikant is bespaard.
Ik twijfel. Zal ik een matje keper 160 grams onder 45°, of een matje 220 Uni op de opgeruwde buitenzijde aanbrengen?
), en de kist gaat al "cartwheelend" de lijzijde van de heuvel af. Het gevolg:
De staart heeft een aantal barstjes in de gelcoat op ca. een kwart vanaf de vleugel.
Ter hoogte van de canopy zitten ook een aantal scheurtjes.
Eerst maar eens wat gelcoat weg dremelen. En zie daar de ellende die ik aantrof. Overal barsten en scheuren.
Wat me erg tegenvalt is het toegepaste materiaal. Dat is geen glasweefsel, maar meer een soort glasgaas. Het lijkt er op dat de dikke gelcoat het eigenlijk helemaal zelf moet doen, en daar is 'ie niet voor bedoeld. Het lijkt er op dat hier op een verkeerde manier door de fabrikant is bespaard.
Ik twijfel. Zal ik een matje keper 160 grams onder 45°, of een matje 220 Uni op de opgeruwde buitenzijde aanbrengen?
Laatst bewerkt:
Ik twijfel. Zal ik een matje keper 160 grams onder 45°, of een matje 220 Uni op de opgeruwde buitenzijde aanbrengen?
Ik zou beide gebruiken. Het restant ziet er eng dun uit, en je schuurt allicht nog wat weg. Het is zelfs niet gek om, als buitenste laagje, nog een fijn matje mee te soppen.
Wel jammer trouwens.. Hoewel, als dit alle schade is ben je nog netjes weggekomen!
Laatst bewerkt:
prop-er
Forum veteraan
Slechts een losgekomen wortelrib op één van de vleugels. Maar die is zo weer op z'n oude plekje teruggelijmd. Ik heb inderdaad nog mazzel gehad.
Gelukkig is dit een goedkoop kistje. Maar het deed wel even zeer.
Mooie oefening in het repareren van een glasrompje, zullen we maar zeggen.
160 en 220 grams wordt me te dik. Dat blijf je straks zo zien.
Dub. dub. dub. Het wordt een 160 grams onder 45 graden met een 25 grams oppervlaktematje voor het makkelijke plamuren. (bedankt voor de tip, daar had ik nog even niet aan gedacht).
Even m'n handschoenen aantrekken, en soppen maar!
Gelukkig is dit een goedkoop kistje. Maar het deed wel even zeer.
Mooie oefening in het repareren van een glasrompje, zullen we maar zeggen.
160 en 220 grams wordt me te dik. Dat blijf je straks zo zien.
Dub. dub. dub. Het wordt een 160 grams onder 45 graden met een 25 grams oppervlaktematje voor het makkelijke plamuren. (bedankt voor de tip, daar had ik nog even niet aan gedacht).
Even m'n handschoenen aantrekken, en soppen maar!







prop-er
Forum veteraan
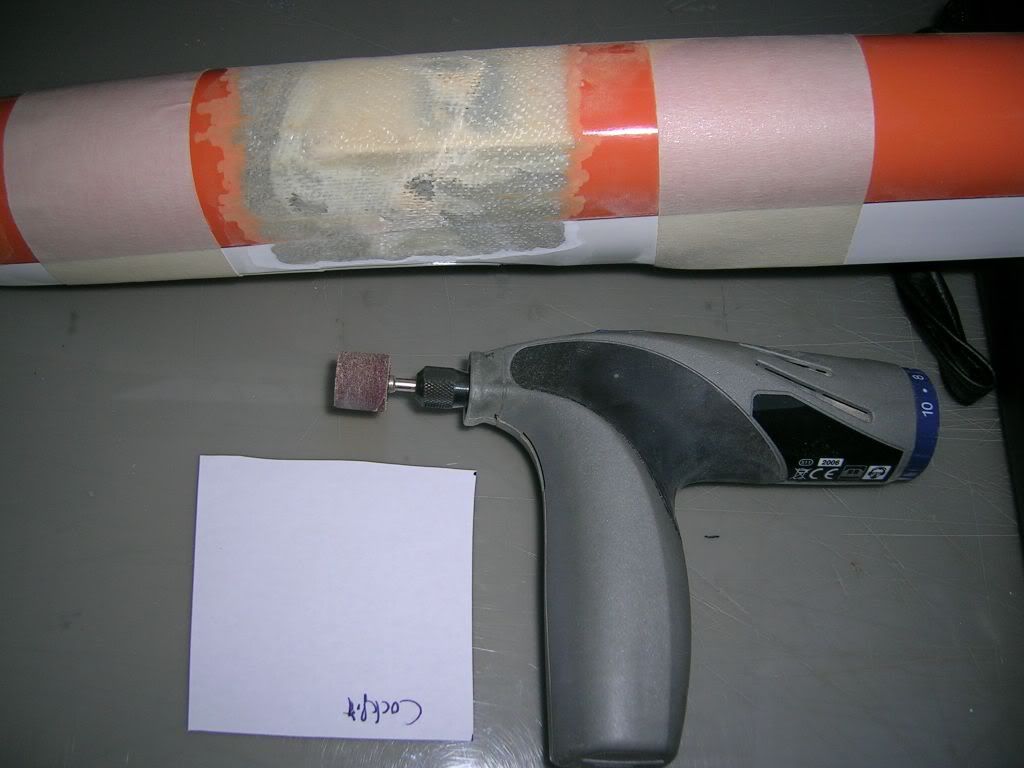
Goed gegokt. De staart is ter hoogte van de breuk sterk genoeg. Ik heb er de nodige krachten in diverse richtingen op gezet, en kan geen noemenswaardige vervormingen waarnemen. 't Voelt ook goed stijf aan. (heel belangrijk...)
Nadat de epoxy ruim de tijd heeft gekregen te harden, eerst de randjes van de patches met de Dremel en het schuurbandje aangepakt. (We willen straks een mooi vloeiende overgang van bestaand naar nieuw.) Daarna met 120 korrel alles goed opgeruwd en twee lagen spuitplamuur erop gespoten.

Even drogen.

Nadat de epoxy ruim de tijd heeft gekregen te harden, eerst de randjes van de patches met de Dremel en het schuurbandje aangepakt. (We willen straks een mooi vloeiende overgang van bestaand naar nieuw.) Daarna met 120 korrel alles goed opgeruwd en twee lagen spuitplamuur erop gespoten.
Even drogen.