Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Groot onderhoud aan de Walrus
- Topicstarter Lex Verkuijl
- Startdatum
raf
Forum veteraan
ben ook bezig met een pic processor om een balance regelaar te maken
oude foto want de rest van de componenten zitten er nu ook op ;
door corona bleven deze achter bij de post
afmetingen zijn 20 X21 mm
nu is het alleen nog de software fine tunen tot ik tevreden ben
ben benieuwd naar uw arduino software oplossing
de print moet nu nog in de ultrasoon en dan ingespoten met isolatie spray
gr raf

oude foto want de rest van de componenten zitten er nu ook op ;
door corona bleven deze achter bij de post
afmetingen zijn 20 X21 mm
nu is het alleen nog de software fine tunen tot ik tevreden ben
ben benieuwd naar uw arduino software oplossing
de print moet nu nog in de ultrasoon en dan ingespoten met isolatie spray
gr raf
Laatst bewerkt:

Over de Arduino zuigertankbesturing gaat hier verder:
https://www.modelbouwforum.nl/threads/proportionele-zuigertank-met-arduino.272842/
https://www.modelbouwforum.nl/threads/proportionele-zuigertank-met-arduino.272842/
Nu het lopende project op het drogen van wat verf na zo goed als klaar is stof ik dit draadje maar weer eens af. Al weer vier jaar geleden dat hier iets gepost is,..... time flies when you're a model builder  .. De Walrus is nu dus al 15 jaar uit de vaart ... schrik er zelf van!
.. De Walrus is nu dus al 15 jaar uit de vaart ... schrik er zelf van! 
Ik heb 2024 voor mezelf als duikboot jaar gedefinieerd, dus dan moet nu eindelijk de Walrus er aan geloven. Van het eerste plan van het groot onderhoud is nu alleen de nieuwe motor plus diens bevestiging gedaan. Ik wilde de duiktank ook met een hall sensor geregeld trimbereik uitrusten, maar ga dat nu anders doen. Inmiddels is een holle-as steppenmotor hier aanwezig. Plan is nu om die tegen het kopschot van de tank te schroeven, en die met een 8mm trapezium draadstang de zuiger te laten bedienen. Deze wordt dan door de stepper heen in- en uit getrokken. Als de steppermotor dan geen stappen mist weet je altijd exact waar de zuiger zich bevind aan de hand van het aantal stappen dat de motor gemaakt heeft. Eens kijken wat dat gaat worden. En die stepper motor is ook nog een stukken kleiner als ouderwetse motor plus vertragingen.
Ook zijn nieuwe kleinere digitale servo's binnen. Deze gaan de roeren bedienen. In de boeg buiten het techerk zitten drie 'ouderwetse' servo's voor het duikroer in de toren, en bediening van perikoop en snuivermasten. Ik moet nog even bedenken wat ik daarmee ga doen, vervangen of laten zitten.
In ieder is het plan er nu 2 Arduino's in te gaan zetten. Eén die de ontvanger uitleest, signalen naar de kruisroeren mixed, en de zuigertank aanstuurt. De tweede dan voor die tank omdat de eerste niet snel genoeg is om de steppedriver vlot genoeg van pulsen te voorzien. Ik zit er over te denken om dat ook een gyro in te bouwen met een druksensor erbij om zo de stabilisering van de LTR 5.2 die ik nog heb over te nemen. Maar daar slaap ik nog even over, met in mijn achterhoofd de tijd die ik met de Leopard tank bezig ben geweest om de loop stabilisering werkend te krijgen. Qua programmering een soortgelijk systeem, maar daar kwam steeds meer bij kijken .. Nu kan ik dat programma voor een groot deel overnemen, en de ervaring met het hele systeem in de Ldaarvan helpt natuurlijk ook, maar wellicht blijft toch de LTR er in. Ik weet het nog niet...
.. De Walrus is nu dus al 15 jaar uit de vaart ... schrik er zelf van! Ik heb 2024 voor mezelf als duikboot jaar gedefinieerd, dus dan moet nu eindelijk de Walrus er aan geloven. Van het eerste plan van het groot onderhoud is nu alleen de nieuwe motor plus diens bevestiging gedaan. Ik wilde de duiktank ook met een hall sensor geregeld trimbereik uitrusten, maar ga dat nu anders doen. Inmiddels is een holle-as steppenmotor hier aanwezig. Plan is nu om die tegen het kopschot van de tank te schroeven, en die met een 8mm trapezium draadstang de zuiger te laten bedienen. Deze wordt dan door de stepper heen in- en uit getrokken. Als de steppermotor dan geen stappen mist weet je altijd exact waar de zuiger zich bevind aan de hand van het aantal stappen dat de motor gemaakt heeft. Eens kijken wat dat gaat worden. En die stepper motor is ook nog een stukken kleiner als ouderwetse motor plus vertragingen.
Ook zijn nieuwe kleinere digitale servo's binnen. Deze gaan de roeren bedienen. In de boeg buiten het techerk zitten drie 'ouderwetse' servo's voor het duikroer in de toren, en bediening van perikoop en snuivermasten. Ik moet nog even bedenken wat ik daarmee ga doen, vervangen of laten zitten.
In ieder is het plan er nu 2 Arduino's in te gaan zetten. Eén die de ontvanger uitleest, signalen naar de kruisroeren mixed, en de zuigertank aanstuurt. De tweede dan voor die tank omdat de eerste niet snel genoeg is om de steppedriver vlot genoeg van pulsen te voorzien. Ik zit er over te denken om dat ook een gyro in te bouwen met een druksensor erbij om zo de stabilisering van de LTR 5.2 die ik nog heb over te nemen. Maar daar slaap ik nog even over, met in mijn achterhoofd de tijd die ik met de Leopard tank bezig ben geweest om de loop stabilisering werkend te krijgen. Qua programmering een soortgelijk systeem, maar daar kwam steeds meer bij kijken .. Nu kan ik dat programma voor een groot deel overnemen, en de ervaring met het hele systeem in de Ldaarvan helpt natuurlijk ook, maar wellicht blijft toch de LTR er in. Ik weet het nog niet...
Roel van Essen
Forum veteraan
Sjongejonge Lex.
En dat allemaal één dag voor Subsail?
Ik neem aan dat je vannacht niet geslapen hebt...
En dat allemaal één dag voor Subsail?
Ik neem aan dat je vannacht niet geslapen hebt...
Zoiets ja... soms komen op de gekste mometen de ideeën boven.
Roel van Essen
Forum veteraan
Ik zal eens bij Tony informeren...Zoiets ja... soms komen op de gekste mometen de ideeën boven.

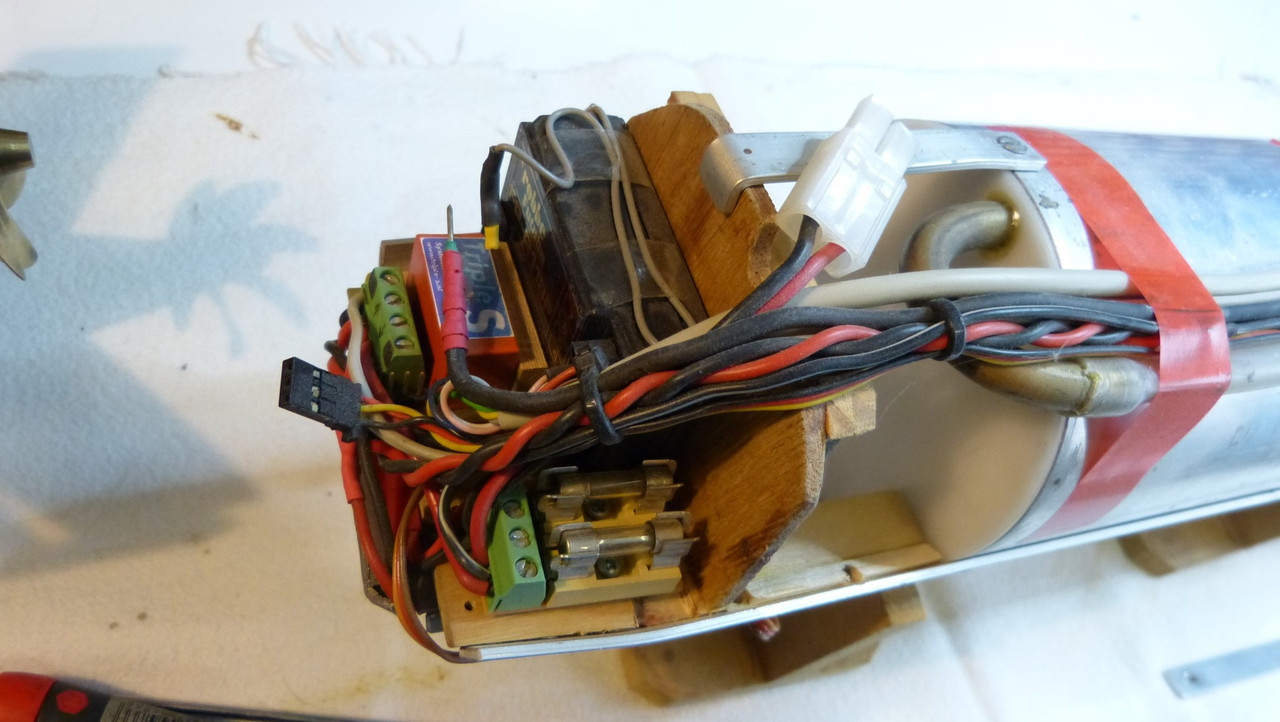
Nou, het feest is begonnen! Eerst maar eens alles uit elkaar trekken. Maar hoe zat die toren nou ook al weer geborgd aan de romp ..... ? En hoe moesten de voorste servo's er ook al weer uit ... ? En waarvoor diende al die oude elektronica ook al weer ... ? Zekeringen ... ?? 20 jaar oude servo's ..... Zelf geprutste oplossingen van problemen van toen waar ik nu echt geen actieve herinneringen meer aan heb ... !!
Pppfffff, er is nog wat te doen!

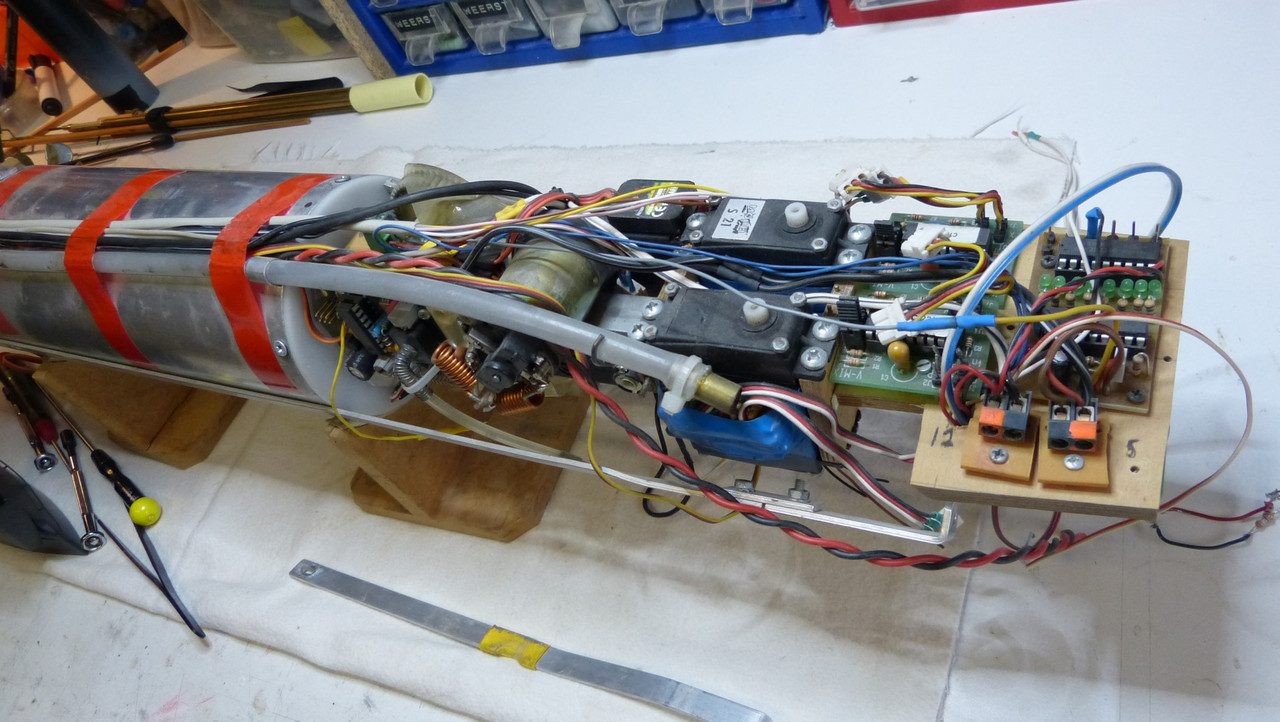
Maar ..... ook nog dingen die toch nog goed zijn en hergebruikt gaan worden. En de romp ruikt nog naar echt hout na al die 20 jaar, en niets is muf of schimmel! Dat valt me mee!
Strippen nu die hap, en eerst de duiktank op een stepper motor met Arduino besturing ombouwen.
Pppfffff, er is nog wat te doen!
Maar ..... ook nog dingen die toch nog goed zijn en hergebruikt gaan worden. En de romp ruikt nog naar echt hout na al die 20 jaar, en niets is muf of schimmel! Dat valt me mee!
Strippen nu die hap, en eerst de duiktank op een stepper motor met Arduino besturing ombouwen.
Is allemaal 20 jaar geleden in elkaar gezet. Joekel van een vertragingskast aan de duiktank, 3 mixers, LTR, failsafes, grote grove elektronica, allemaal full size servo's, alles met draadjes aan elkaar geknoopt, anders was er toen niet. Gaat er nu heel anders uitzien.
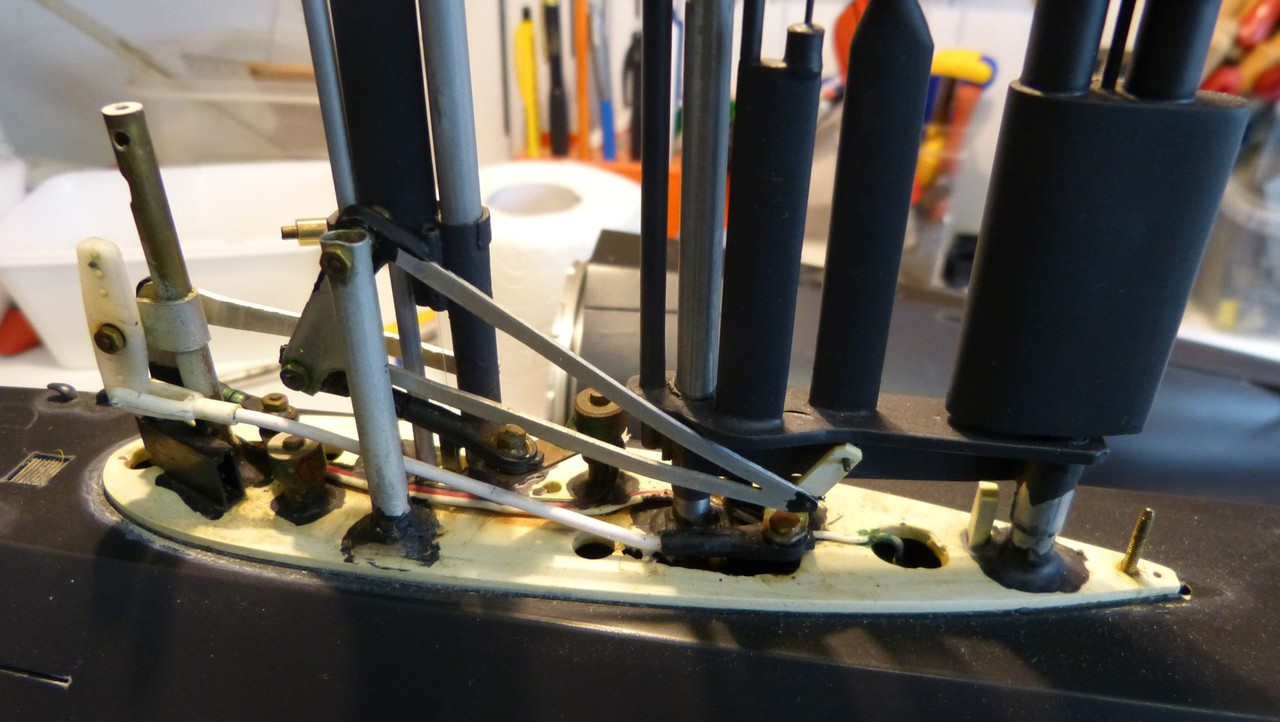
Maar de toren mechaniek met periskoop en plateau met masten, en de besturing van de roeren werkt nog prima, valt me reuze mee!
Maar de toren mechaniek met periskoop en plateau met masten, en de besturing van de roeren werkt nog prima, valt me reuze mee!
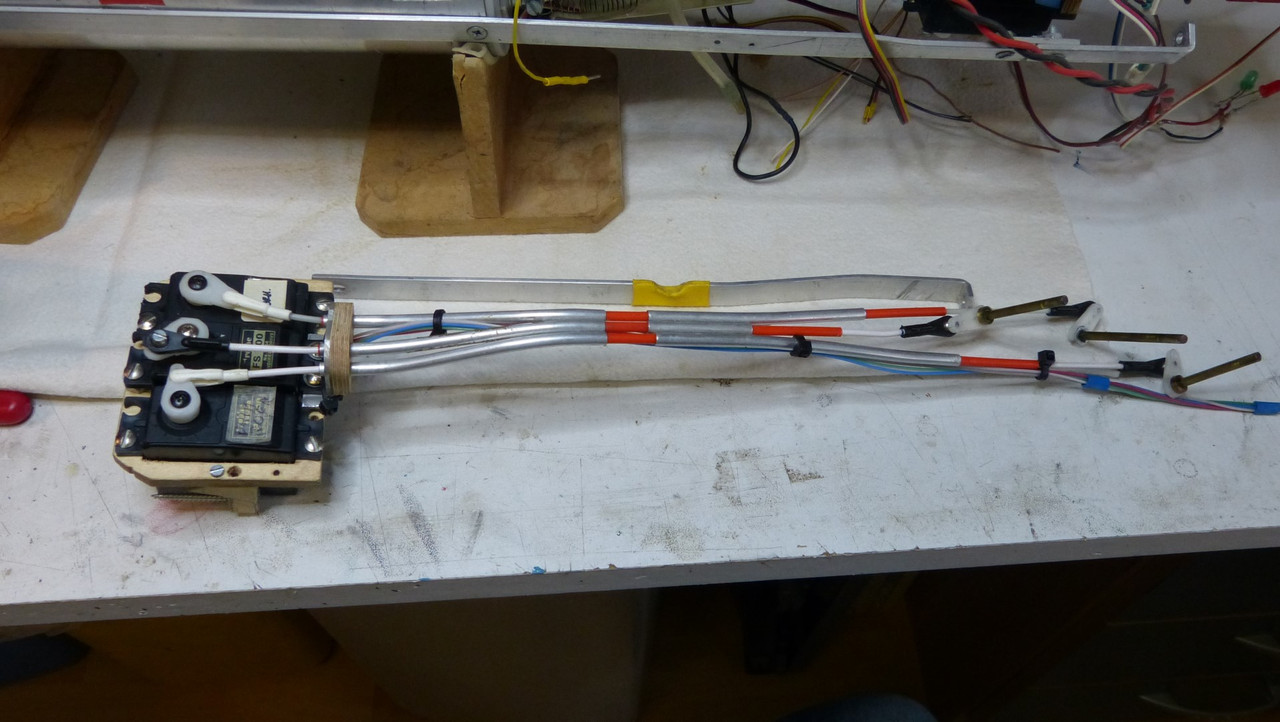
Nee, drie servos helemaal in de boeg met bowdenkabel. Dat is de afbeelding met blokje van 3 servos en Alu buisjes er aan. De draaibeweging gaat dan met een asje met afdichting de toren in, en daar met hevels naar de te bewegen delen.
Begin van de nieuwe aandrijving van de zuigertank:

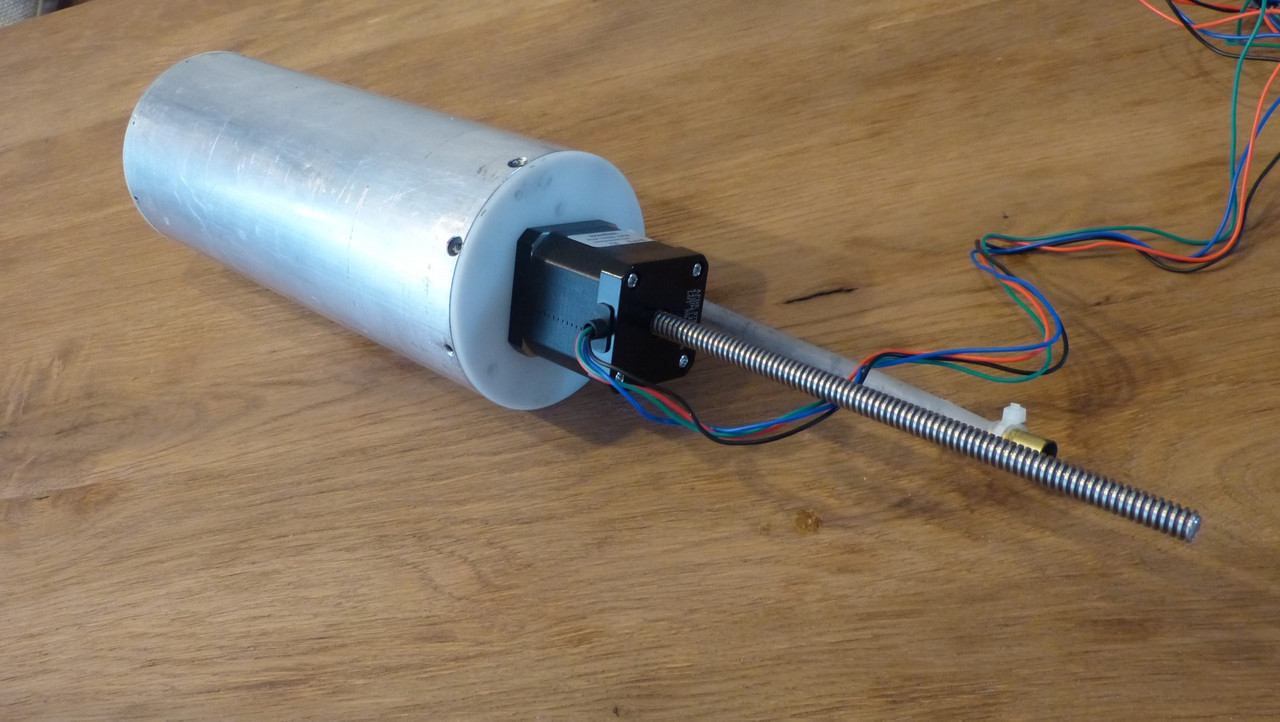
Hoi LexBegin van de nieuwe aandrijving van de zuigertank:
Zijn dat kant en klare stappenmotoren of heb je ze omgebouwd, heb ooit zoiets geprobeerd maar kreeg het niet soepel lopend. Maar denk dat jij iets andere motoren gebruikt
Is een kant en klare 'niet captieve' stepper. Ik heb hem al een een driver gehangen en hij loopt goed. Ik denk dat ik uiteindelijk een te krachtige heb uitgezocht, maar dat geeft alleen maar meer reserve.
Of zo'n stepper soepel loopt ligt net als bij een brushless motor meer aan de aansturing dan aan de motor zelf. De Arduino(s) en driver daarop programmeren is de volgende stap.
Of zo'n stepper soepel loopt ligt net als bij een brushless motor meer aan de aansturing dan aan de motor zelf. De Arduino(s) en driver daarop programmeren is de volgende stap.
Roel van Essen
Forum veteraan
Dat wordt even doorbuffelen om voor zaterdag klaar te zijn!
Ik heb de kielvin van de Micro Magic alvast geslepen...
Ik heb de kielvin van de Micro Magic alvast geslepen...
Niet weer dat trauma naar boven halen Roel ....  Was er net een beetje overheen ...
Was er net een beetje overheen ...
Tot Zaterdag!
Was er net een beetje overheen ... Tot Zaterdag!
Is een kant en klare 'niet captieve' stepper. Ik heb hem al een een driver gehangen en hij loopt goed. Ik denk dat ik uiteindelijk een te krachtige heb uitgezocht, maar dat geeft alleen maar meer reserve.
Of zo'n stepper soepel loopt ligt net als bij een brushless motor meer aan de aansturing dan aan de motor zelf. De Arduino(s) en driver daarop programmeren is de volgende stap.
Het was meer dat ik de motor had aangepast naar zon lange spindel maar dat was geen succes, liep stroef dus heb het erbij gelaten..
Ben erg benieuwd naar jouw resultaten