wie kan mij een goed advies geven omtrent een door mij zelf ontworpen "Drone"
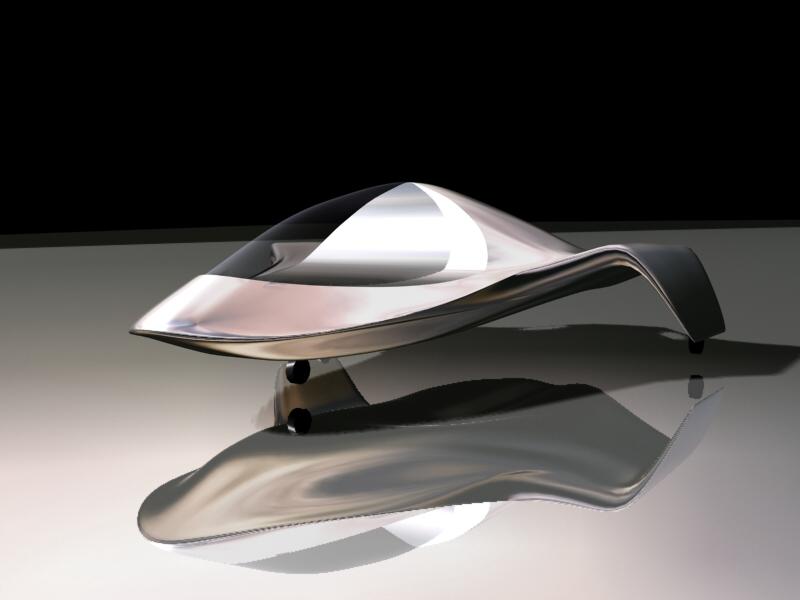
het toestel heeft een afmeting van ca 65 cm spanwijdte een lengte van 75 cm en is gemaakt van koolstofvezel ( ca 950 gram ) .
wil 3 electro motoren voor de verticale, rol en pitch beweging alsmede 2 motoren in de staart voor de verticale voortstuwing plaatsen.
heb van internet een bestaand schema genomen en daarop de "benodigde" componenten ingevuld. ( zie bijlage )
ik zelf weet helaas weinig omtrent dit soort schema's, maar er is vast wel iemand die mij hierbij kan helpen.
hoor het graag !
met vriendelijke groet im:
im:
dio roelofs


het toestel heeft een afmeting van ca 65 cm spanwijdte een lengte van 75 cm en is gemaakt van koolstofvezel ( ca 950 gram ) .
wil 3 electro motoren voor de verticale, rol en pitch beweging alsmede 2 motoren in de staart voor de verticale voortstuwing plaatsen.
heb van internet een bestaand schema genomen en daarop de "benodigde" componenten ingevuld. ( zie bijlage )
ik zelf weet helaas weinig omtrent dit soort schema's, maar er is vast wel iemand die mij hierbij kan helpen.
hoor het graag !
met vriendelijke groet
im:dio roelofs
Laatst bewerkt door een moderator:
 . Je moet hier complete FC algorythme zelf maken.
. Je moet hier complete FC algorythme zelf maken.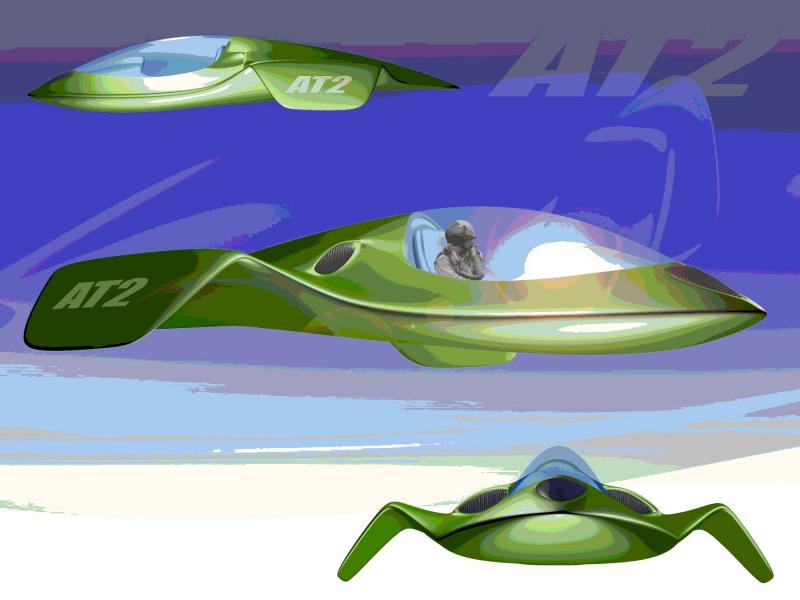




")