Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Home made upgrades TRX Slash 4x4
- Topicstarter Razorneck
- Startdatum
 altijd ruim afzagen is het beste want je kunt er immers niks bij zagen
altijd ruim afzagen is het beste want je kunt er immers niks bij zagenZiet er erg goed uit! Ik had inderdaad al wel een servo beschermingsplaatje gemaakt van een stukje lexan. Ik wou eerst een outwear hoes gaan kopen voor mijn 4pede. Maar ik ga nu er toch maar een zelf maken. Hoeft toch niet waterdicht te zijn en dit lijkt me veel goedkoper. Gewoon nylon gaas? Ik ga eens wat zoeken. Bedankt voor het idee!
Ik ga (dankzij jou) nu ook beginnen aan mudflaps voor de slash 2wd vxl. Aangezien ik een weeliebar achterop heb zitten ipv de bumper kan ik niet iets kopen. Zal wel wat fotos plaatsen als ie af is. de flaps zijn niet perfect, maar het is altijd leuk om


 iets te proberen te maken, en als het mislukt is het jammr. Fotos zullen volgen.
iets te proberen te maken, en als het mislukt is het jammr. Fotos zullen volgen.
Hier de fotos
Hier de fotos
Laatst bewerkt door een moderator:
B
bobbeldorp
Guest
ik vind dit eigenlijk een heel leuk idee, eigenlijk zou er een topic moeten zijn (dit misschien met een andere titel) waar je je eigengemaakte oplossingen kan laten zien. en zo weer andere mensen op ideeën kan brengen. niet alleen voor de slash maar voor alle auto's, veel is universeel toepasbaar met een beetje creativiteit.
B
bobbeldorp
Guest
ok, ik heb voor 2 auto's een chassis brace gemaakt...
dit om minder on-afgeveerd gewicht te hebben en er bij bijde auto's schade voorkomen kan worden door het chassis stijver te maken.
Bij de e-revo is er grote kans op schade aan zowel de voorste bulkheads als de achterste.
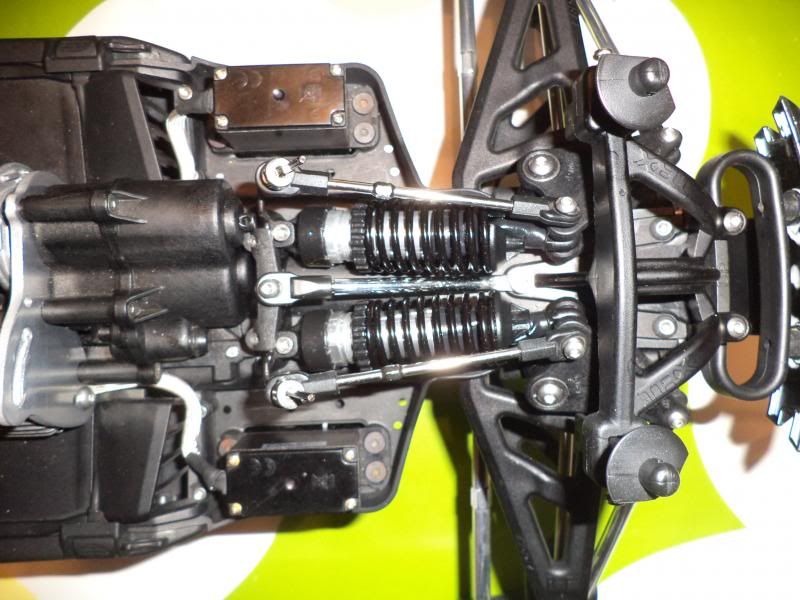
het gaat dus om het stangetje tussen de schikbempers. voor moest ik het staafje verbouwen.
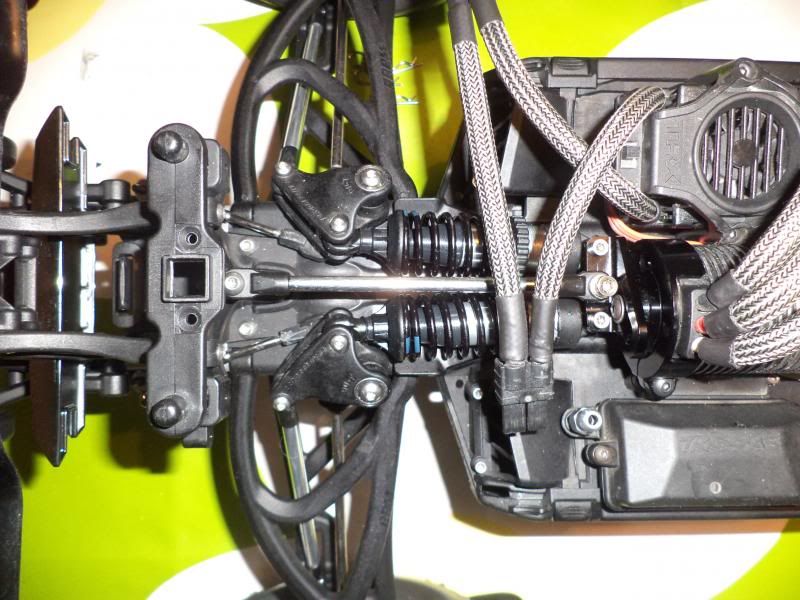
achter hoefde je alleen een gaatje te tappen in het allu van de motor brace.
Bij de thunder tiger mt4 g3 heb je kans dat je het chassis verbuigt bij een hele harde landing.

het gaat hier dus om het staafje tussen de shocktowers. het is een tentstok met daarop een t-stukje gehardsoldeerd. het ontwerp is van mijn beste vriend Sjoerd de Fooy. hij is nog niet helemaal af, verven moet nog.

Hij kan ook makkelijk open zodat hij niet in de weg zit.
ik hoop dat het ook is toe te passen op andere auto's
dit om minder on-afgeveerd gewicht te hebben en er bij bijde auto's schade voorkomen kan worden door het chassis stijver te maken.
Bij de e-revo is er grote kans op schade aan zowel de voorste bulkheads als de achterste.
het gaat dus om het stangetje tussen de schikbempers. voor moest ik het staafje verbouwen.
achter hoefde je alleen een gaatje te tappen in het allu van de motor brace.
Bij de thunder tiger mt4 g3 heb je kans dat je het chassis verbuigt bij een hele harde landing.
het gaat hier dus om het staafje tussen de shocktowers. het is een tentstok met daarop een t-stukje gehardsoldeerd. het ontwerp is van mijn beste vriend Sjoerd de Fooy. hij is nog niet helemaal af, verven moet nog.
Hij kan ook makkelijk open zodat hij niet in de weg zit.
ik hoop dat het ook is toe te passen op andere auto's
ok, ik heb voor 2 auto's een chassis brace gemaakt...
dit om minder on-afgeveerd gewicht te hebben en er bij bijde auto's schade voorkomen kan worden door het chassis stijver te maken.
Bij de e-revo is er grote kans op schade aan zowel de voorste bulkheads als de achterste.
het gaat dus om het stangetje tussen de schikbempers. voor moest ik het staafje verbouwen.
achter hoefde je alleen een gaatje te tappen in het allu van de motor brace.
Bij de thunder tiger mt4 g3 heb je kans dat je het chassis verbuigt bij een hele harde landing.
het gaat hier dus om het staafje tussen de shocktowers. het is een tentstok met daarop een t-stukje gehardsoldeerd. het ontwerp is van mijn beste vriend Sjoerd de Fooy. hij is nog niet helemaal af, verven moet nog.
Hij kan ook makkelijk open zodat hij niet in de weg zit.
ik hoop dat het ook is toe te passen op andere auto's
He bobbeldorp dat ziet er gelikt uit, volgens mij zijn er voor de Traxxas Slash inderdaad ook van dit soort sets te koop. Ik weet zeker dat ik ze ergens gezien heb op een site, maar weet niet meer waar. De fabrikant claimde dat het Het chassis er stijver van wordt en schijnt daardoor ook een positief effect te hebben op het rijgedrag.
In dit geval zal je de grootste impacs op het shassis nu opgevangen worden door beide shocktowers in plaats één.
In ieder geval is het iets wat ook heel goed toepasbaar is voor andere modelen. Heb je er al mee gereden en merk je kwa rijgedrag ook echt een verschil ?
Zal nog eens naspeuren voor de Slash brace, dan laat ik het linkje nog even zien, kan je het vergelijken.
Gr martin
B
bobbeldorp
Guest
dit is niet gekocht als set maar het zijn 2 verbouwde pushrods van de vering. (in het geval van de revo)
Ik heb er mee gereden en je merkt dat de auto veel directer stuurt, het chassis is echt stijf en heeft niet meer de mogelijkheid een deel van de stuurkracht op te vangen. verder blijft de auto na een sprong veel meer in model en zal alles door de schokbrekers moeten worden opgevangen. wat resulteert in minder stuiteren. (niet meer)
Ik heb er mee gereden en je merkt dat de auto veel directer stuurt, het chassis is echt stijf en heeft niet meer de mogelijkheid een deel van de stuurkracht op te vangen. verder blijft de auto na een sprong veel meer in model en zal alles door de schokbrekers moeten worden opgevangen. wat resulteert in minder stuiteren. (niet meer)
dit is niet gekocht als set maar het zijn 2 verbouwde pushrods van de vering. (in het geval van de revo)
Dat had ik begrepen hoor, ik wil alleen zeggen dat dit soort sets ook ergens te koop zijn, en behoorlijk prijzig. De onderdelen die ik gezien heb waren gemaakt van aluminium en carbon.
Heb alleen de link van de fabrikant of leverancier niet meer terug kunnen vinden. De ( zelf gemaakte ) upgrade in jouw geval ziet er wel gelikt uit.

hoe heb je eigenlijk het aluminium gebogen?
Heel simpel hoor als je een bankschroefje hebt en een een paar aluminium hoek profieltjes kom je een heel eind.
Maak een paar aluminium hoekprofielen die net iets breder zijn dan de bek van de bankschroef om je werkstuk te beschermen tegen beschadigingen.
Tevens is de rand van het hoekprofiel kaars recht en krijg je een mooie scherpe buigrand.( wel ff een buiglijn aftekenen waarop je werkstuk in de bankschroef kunt inspannen.)
Als je 1 mm of 1,5 mm aluminium plaat hebt kun je het met je handen heel makkelijk omzetten. Of je gebruikt een blokje hout om de kracht over de hele buiglijn te verdelen, je hoeft niet echt een hamer te gebruiken.
Als het aluminium dikker wordt zal ik het advies geven om het werkstuk tussen twee blokjes hout te klemmen waarvan de randen een klein beetje rond gevijlt is.
Als je de buiglijn namelijk te scherp maakt zal het materiaal scheurtjes vertonen en wordt dit een zwakke plek.
")
Bedankt, zal hier veel,aan hebben en zal het zeker toepassen.
Ik ben trouwens bezig met weer een nieuw projectje voor mijn Slash waarvan ik tzt een aantal foto's met beschrijving zal toevoegen.
Als ik de handel klaar heb zal ik het posten, naar verwachting binnen een week.
Gr Martin
En waar ben je dan zowel mee bezig??")
Het is iets waar ik verbaasd over bent dat het niet toegepast wordt op electro rc auto's.
Namelijk een airscoop of diffuser voor op de electromotor van een RC car, en dan bedoel ik niet de koelopeningen die je in de body maakt maar letterlijk op de motor zelf. je ziet het soms wel op nitro modelen maar nooit op de electro varianten terwijl daar de motoren ook behoorlijk warm kunnen worden, en hier geld ook hoe koeler hoe beter.
Ik ben al aardig onderweg met het ontwerp en de fabricage, maar je zal het tzt hier in dit topic gaan zien met toelichting en foto's.
Groetjes M:grin:rtin
een Airscoop bedoeld ie. deze zitten op de meeste body's voor de competitie offroad wagentjes alleen moet je er zelf een opening in maken als het nodig is dat je esc te weinig koeling krijgt.
verder... idd... vertanding van je versnellingsbak.
gear ratio's verdiep je daar maar even in.
http://www.pkracing.nl/tandwielverhouding-nl.jsp
en daarna ( lees het laatste schuin gedrukte stukje)
BORSTELLOZE MOTOREN EN REGELAARS UITGELEGD

 Een brushless of borstelloze motor is een motor welke zonder koolborstels werkt. De wikkelingen zitten in het huis, en de magneten zitten op de ronddraaiende as gemonteerd. (Kan ook andersom, maar dat wordt alleen in vliegtuigen gebruikt en wordt dan een "buitenloper" genoemd)
Een brushless of borstelloze motor is een motor welke zonder koolborstels werkt. De wikkelingen zitten in het huis, en de magneten zitten op de ronddraaiende as gemonteerd. (Kan ook andersom, maar dat wordt alleen in vliegtuigen gebruikt en wordt dan een "buitenloper" genoemd)
Omdat zo'n motor dus geen koolborstels en geen collector heeft, moet de motor aangestuurd worden door een speciale regelaar, die er voor zorgt dat spoelen in de motor (velden) precies op het juiste moment stroom krijgen, zodat de magneten van de rotor op het goede moment aangetrokken of afgestoten worden. Een borstelloze motor kan dus niet gebruikt worden met een normale regelaar, daarom moet je om er mee te beginnen altijd een complete set bestaande uit motor en regelaar kopen!
 Als je eenmaal een set hebt, kun je later wel los een andere motor en of een andere regelaar kopen. Omgekeerd kunnen de meeste regelaars voor een borstelloze motor wel gebruikt worden met een normale motor.
Als je eenmaal een set hebt, kun je later wel los een andere motor en of een andere regelaar kopen. Omgekeerd kunnen de meeste regelaars voor een borstelloze motor wel gebruikt worden met een normale motor.
 Veel brushless regelaars hebben als optie dat je kunt kiezen of je de achteruit functie wel of niet wilt gebruiken.
Veel brushless regelaars hebben als optie dat je kunt kiezen of je de achteruit functie wel of niet wilt gebruiken.
Dit in verband met het feit dat bij sommige wedstrijden een achteruit verboden is.
Omdat de elektronische werking van een borstelloze regelaar heel anders is dan van een normale regelaar, maakt het voor de prestatie van dit soort regelaars niet uit of er wel of niet een achteruit op zit, waar dit bij traditionele regelaars een enorm verschil is. De voor- en de achteruit maken gebruik van dezelfde eindtrap, alleen de pulsvolgorde wordt omgekeerd. Wel of geen achteruit heeft dus bij een borstelloze regelaar geen enkele invloed op de prestaties van de regelaar Verder zijn er vaak verschillende programma's waar je uit kunt kiezen, en waarmee de motor het karakter krijgt van een rustige standaard tot een super snelle modified motor. Ook hebben de moderne regelaars een lipo programma ingebouwd. Lipo's mogen n.l. nooit diep ontladen worden, en de regelaar schakelt zichzelf of naar een lagere vermogen of zelfs helemaal uit indien nodig als de spanning een kritische ondergrens dreigt te bereiken.
Een van de grootste voordelen van een borstelloze motor is dat er vrijwel geen slijtage of veroudering optreedt. Een motor met koolborstels loopt iedere keer dat je hem gebruikt, een klein stukje in prestatie terug. Hij loopt dus alleen maximaal als de borstels en de collector als nieuw zijn!

Een borstelloze motor heeft dit niet, zoals hij nu loopt, loopt hij in principe na 500 keer rijden nog net zo. Je hoeft dus geen koolborstels te vervangen, geen collector af te draaien, geen draaibank te hebben om je motoren in goede conditie te houden. Alleen maar af en toe schoonmaken en de lagers olin. Bovendien is de efficiency van dit soort motoren beter, hij loopt dus langer op een accu lading dan een motor met koolborstels met een vergelijkbare prestatie
Zoals gezegd wordt een borstelloze motor op een speciale manier aangestuurd, waarbij de regelaar de 3 spoelen precies op de juiste manier en frequentie aan moet sturen zodat ze de magneet van de rotor op het juiste moment aantrekken of aanstoten, zodat de rotor draait. Hoe meer toeren de motor maakt, hoe sneller de regelaar de spoelen moet aansturen. De regelaar moet dus op elk moment "weten" in welke positie de rotor staat t.o.v. de spoelen.
Dat kan op twee manieren:
SENSORLOZE MOTOR

 Zodra een borstelloze motor draait, verandert de langskomende magneet de stroom door de spoel iets (simpel gezegd), en dat gegeven kan de regelaar gebruiken om te bepalen waar de magneet zich bevindt en dus ook hoe de spoel op dat moment aangestuurd moet worden. Dit proces noemt men sensorloos. Het voordeel is dat dit systeem heel erg efficiënt is, en hele hoge toerentallen en grote vermogens kan leveren.
Zodra een borstelloze motor draait, verandert de langskomende magneet de stroom door de spoel iets (simpel gezegd), en dat gegeven kan de regelaar gebruiken om te bepalen waar de magneet zich bevindt en dus ook hoe de spoel op dat moment aangestuurd moet worden. Dit proces noemt men sensorloos. Het voordeel is dat dit systeem heel erg efficiënt is, en hele hoge toerentallen en grote vermogens kan leveren.
Het nadeel was tot voor kort, dat de motor al "even" moet draaien voor de regelaar voor de regelaar de motor optimaal aan kan sturen. In boten en vliegtuigen was dat geen probleem: als je de motor start kwam het voor dat de motor eerst even aarzelend ging draaien, en zelfs even de verkeerde kant op ging draaien, voor alles goed ging. In boten en vliegtuigen kan een elektro motor eerst op toeren komen, voor de schroef energie gaat vragen, en blijft daarna vrijwel altijd dezelfde kant op draaien.
Bij auto's moet voor elke beweging die de motor wil maken, de hele auto direct mee verplaatst worden. Auto's moeten bovendien snel accelereren, hard remmen, en weer van stilstand of lage snelheid weg trekken. De eerste sensorloze motoren hadden hier problemen mee, dus dit vroeg toch om een andere benadering.
Motoren zonder sensor worden alleen maar met 3 dikke stroomdraden op de regelaar aangesloten MOTOR MET SENSOR

 Om het startprobleem bij auto's op te lossen werd speciaal hiervoor een motor/regelaar systeem ontwikkeld met 3 ingebouwde HAL sensoren, die aan de regelaar doorgeven in welke stand het anker staat en in welke richting hij draait. Dit geeft een minder aarzelend wegrijden en een hoger koppel op lage toeren t.o.v. de eerste generatie borstelloze regelaars. Het feit dat motoren met sensor een wat lagere efficiency hebben dan sensorloze motoren, en minder topsnelheid, werd ruimschoots goedgemaakt door de betere rijeigenschappen. Deze motoren worden op de regelaar aangesloten met de gebruikelijke 3 dikke stroomdraden, plus met een 5 of 6 aderige dunne bedrading met stekker voor de sensoren. 2e GENERATIE SENSORLOZE MOTOR/REGELAAR COMBINATIE
Om het startprobleem bij auto's op te lossen werd speciaal hiervoor een motor/regelaar systeem ontwikkeld met 3 ingebouwde HAL sensoren, die aan de regelaar doorgeven in welke stand het anker staat en in welke richting hij draait. Dit geeft een minder aarzelend wegrijden en een hoger koppel op lage toeren t.o.v. de eerste generatie borstelloze regelaars. Het feit dat motoren met sensor een wat lagere efficiency hebben dan sensorloze motoren, en minder topsnelheid, werd ruimschoots goedgemaakt door de betere rijeigenschappen. Deze motoren worden op de regelaar aangesloten met de gebruikelijke 3 dikke stroomdraden, plus met een 5 of 6 aderige dunne bedrading met stekker voor de sensoren. 2e GENERATIE SENSORLOZE MOTOR/REGELAAR COMBINATIE

 De techniek heeft echter niet stil gestaan, en er is nu een tweede generatie regelaars op de markt die motoren zonder sensor door een veel nauwkeuriger meettechniek zeker zo probleemloos zonder aarzelen laten wegrijden, een gelijkwaardige acceleratie vanuit lage toeren geven als een motor met sensor, gebruiken, maar dit dus koppelen aan de hogere efficiency en hogere topsnelheid van een sensorloze motor.
De techniek heeft echter niet stil gestaan, en er is nu een tweede generatie regelaars op de markt die motoren zonder sensor door een veel nauwkeuriger meettechniek zeker zo probleemloos zonder aarzelen laten wegrijden, een gelijkwaardige acceleratie vanuit lage toeren geven als een motor met sensor, gebruiken, maar dit dus koppelen aan de hogere efficiency en hogere topsnelheid van een sensorloze motor.
Dit is mogelijk gemaakt door een speciaal ontwikkelde chip en bijpassende software.
Het resultaat is inderdaad verbluffend als je de oude generatie sensorloze motoren kent!
En van de eerste regelaars met dit nieuwe principe is de nieuwe Corally BRL regelaar, die dus niet alleen heel betaalbaar is, maar ook de nieuwste generatie regelaars vertegenwoordigd. DELTA EN STER SCHAKELING
Er is ook verschil in hoe de 3 spoelen van de motor onderling aangesloten zijn. Dit kan als STER schakeling zijn, of als DELTA geschakeld. Zonder uitgebreid op dit moeilijke onderwerp in te gaan, is het zo dat een DELTA gewikkelde motor een vergelijkbaar vermogen levert als een STER gewikkelde motor met +/- 60% van het aantal wikkelingen. Dus een 10 wikkelingen DELTA gewikkelde motor is ongeveer vergelijkbaar met een 6 wikkelingen STER gewikkelde motor DELTA WIKKELING STER WIKKELING

 Delta gewikkelde motoren zijn qua vermogen vergelijkbaar met een stergewikkelde motor met +/- 2/3 x het aantal wikkelingen.
Delta gewikkelde motoren zijn qua vermogen vergelijkbaar met een stergewikkelde motor met +/- 2/3 x het aantal wikkelingen.
Een 10 wikkelingen Delta is dus ongeveer vergelijkbaar met een 6 wikkelingen Ster) bij een iets hogere efficiency
Stergewikkelde motoren zijn een fractie minder efficiënt en hebben een vergelijkbaar vermogen als een Delta gewikkelde motor met +/ 65% meer wikkelingen FUNCTIES
 De huidige borstelloze regelaars zijn vaak rond dezelfde chipset opgebouwd, en hebben vele instel en aanpassings mogelijkheden. Dat begint al met het wel of niet willen hebben van een achteruit functie. Bij regelaars voor motoren MET koolborstels, moet het vooruit circuit aangepast worden om achteruit te kunnen, en dat brengt een behoorlijk extra verlies mee, ook als je alleen maar vooruit rijdt. Als je met zon regelaar voor gebruik met koolborstelmotoren de achteruit al uit kan schakelen, wordt het verlies in de vooruit daar niet kleiner mee.
De huidige borstelloze regelaars zijn vaak rond dezelfde chipset opgebouwd, en hebben vele instel en aanpassings mogelijkheden. Dat begint al met het wel of niet willen hebben van een achteruit functie. Bij regelaars voor motoren MET koolborstels, moet het vooruit circuit aangepast worden om achteruit te kunnen, en dat brengt een behoorlijk extra verlies mee, ook als je alleen maar vooruit rijdt. Als je met zon regelaar voor gebruik met koolborstelmotoren de achteruit al uit kan schakelen, wordt het verlies in de vooruit daar niet kleiner mee.
Bij regelaars voor borstelloze motoren werkt dat heel anders, de motor draait links of rechtsom door de volgorde waarin de spoelen aangestuurd worden om te keren. Elke regelaar voor borstelloze motoren kan dus zowel vooruit of achteruit draaien, zonder dat dat invloed heeft op de efficiency van de regelaar. Er zijn een paar regelaar waar deze softwarematige draairichtings-omkering niet aangeroepen kan worden, maar bij 99.9% van de regelaars kan dat dus altijd. Maar omdat voor wedstrijd gebruik het soms niet toegestaan is, en het in sommige heel speciale toepassingen het wel eens handiger kan zijn dat de achteruit niet kan werken, is de achteruitfunctie vaak aan of uit te zetten
Andere Instelmogelijkheden zijn:
 borstels is vaak niet eens nodig dus.
borstels is vaak niet eens nodig dus.
In veel gevallen moet je de regelaar programmeren door op een knopje te drukken, en dan een bepaalde sequens van knopje indrukken, lampje wat gaat branden, piepjes tellen etc. Dat kan nog wel eens lastig zijn, je moet alles precies op de juiste manier doen, en n vergissing betekent overnieuw beginnen.
Steeds meer regelaars echter worden met een z.g. programmeer kaart geleverd. Dat wordt wel een KAART genoemd, maar dat is eigenlijk niet de juiste benaming: het is meestal een klein kastje met drukknoppen en een lcd schermpje. Dat wordt aangesloten op de regelaar, en daarmee kun je alle functies heel makkelijk oproepen en aanpassen. Dus geen getob met boekjes lezen, piepjes tellen, weer overnieuw beginnen, maar gewoon door het menuutje lopen en de functie uitzoeken die je wilt, en dan de waarde veranderen. Om dat allemaal in te stellen hoef je dan dus geen geleerde te zijn, de programmeer unit wijst je vanzelf de weg!
OVERBRENGINGS VERHOUDING
Een groot verschil in gebruik tussen motor/regelaar met koolborstels en borstelloze motor/regelaar combinaties is het bepalen van de juiste overbrengings verhouding.
 Bij een motor/regelaar MET koolborstels is het zo dat als de regelaar te heet wordt, dat een aanduiding is dat de motor de regelaar te zwaar belast, en dat je een lichtere overbrengingsverhouding (b.v. kleiner motortandwiel) moet kiezen.
Bij een motor/regelaar MET koolborstels is het zo dat als de regelaar te heet wordt, dat een aanduiding is dat de motor de regelaar te zwaar belast, en dat je een lichtere overbrengingsverhouding (b.v. kleiner motortandwiel) moet kiezen.
Zo'n conventionele regelaar "schakelt" op een vaste frequentie, waarbij bij weinig gas een korte puls gegeven wordt, en bij vol gas staat de eindtrap volledig open en schakelt hij helemaal niet meer. Zo'n regelaar wordt warm door het verlies wat er in de regelaar zit, maal de stroomsterkte (Ampres) door de eindtrap. Als dat te hoog is, ontstaat er te veel warmte. Door dan een kleiner motortandwiel te kiezen, wordt het motortoerental hoger, en daarmee het amprage wat door de regelaar loopt lager, zodat er minder warmte in de regelaar ontstaat.
Bij regelaars voor borstelloze motoren ligt dat anders, wat komt door een wezenlijk verschil in motor aansturing.
 Bij een borstelloze regelaar wordt de snelheid van de motor bepaald door de frequentie waarin de spoelen aangestuurd worden. Bij lage toeren hoeft een regelaar dus weinig te pulsen, maar hoe hoger het toerental wordt, hoe vaker de regelaar moet pulsen. Bij de standaard motoren met 3 spoelen en 2 polige magneet, moet de regelaar 6 x per omwenteling schakelen. Bij 1000 toeren dus 6000 maal per minuut, bij 50.000 toeren per minuut dus 300.000 per minuut oftewel 5000 keer per seconde. Per puls ontstaat er een klein beetje verlies in de eindtrap wat op zijn beurt warmte genereert. Hoe hoger het toerental van de motor dus is, hoe vaker de regelaar moet schakelen en des te warmer de eindtrap zal worden. Natuurlijk speelt de motor belasting ook mee met het warmer worden van de regelaar. Het bepalen van de overbrengingsverhouding moet dus na een testrit bepaald worden door zowel de temperatuur van de motor als die van de regelaar in acht te nemen.
Bij een borstelloze regelaar wordt de snelheid van de motor bepaald door de frequentie waarin de spoelen aangestuurd worden. Bij lage toeren hoeft een regelaar dus weinig te pulsen, maar hoe hoger het toerental wordt, hoe vaker de regelaar moet pulsen. Bij de standaard motoren met 3 spoelen en 2 polige magneet, moet de regelaar 6 x per omwenteling schakelen. Bij 1000 toeren dus 6000 maal per minuut, bij 50.000 toeren per minuut dus 300.000 per minuut oftewel 5000 keer per seconde. Per puls ontstaat er een klein beetje verlies in de eindtrap wat op zijn beurt warmte genereert. Hoe hoger het toerental van de motor dus is, hoe vaker de regelaar moet schakelen en des te warmer de eindtrap zal worden. Natuurlijk speelt de motor belasting ook mee met het warmer worden van de regelaar. Het bepalen van de overbrengingsverhouding moet dus na een testrit bepaald worden door zowel de temperatuur van de motor als die van de regelaar in acht te nemen.
" basis info"
verder... idd... vertanding van je versnellingsbak.
gear ratio's verdiep je daar maar even in.
http://www.pkracing.nl/tandwielverhouding-nl.jsp
en daarna ( lees het laatste schuin gedrukte stukje)
BORSTELLOZE MOTOREN EN REGELAARS UITGELEGD
Omdat zo'n motor dus geen koolborstels en geen collector heeft, moet de motor aangestuurd worden door een speciale regelaar, die er voor zorgt dat spoelen in de motor (velden) precies op het juiste moment stroom krijgen, zodat de magneten van de rotor op het goede moment aangetrokken of afgestoten worden. Een borstelloze motor kan dus niet gebruikt worden met een normale regelaar, daarom moet je om er mee te beginnen altijd een complete set bestaande uit motor en regelaar kopen!
Dit in verband met het feit dat bij sommige wedstrijden een achteruit verboden is.
Omdat de elektronische werking van een borstelloze regelaar heel anders is dan van een normale regelaar, maakt het voor de prestatie van dit soort regelaars niet uit of er wel of niet een achteruit op zit, waar dit bij traditionele regelaars een enorm verschil is. De voor- en de achteruit maken gebruik van dezelfde eindtrap, alleen de pulsvolgorde wordt omgekeerd. Wel of geen achteruit heeft dus bij een borstelloze regelaar geen enkele invloed op de prestaties van de regelaar Verder zijn er vaak verschillende programma's waar je uit kunt kiezen, en waarmee de motor het karakter krijgt van een rustige standaard tot een super snelle modified motor. Ook hebben de moderne regelaars een lipo programma ingebouwd. Lipo's mogen n.l. nooit diep ontladen worden, en de regelaar schakelt zichzelf of naar een lagere vermogen of zelfs helemaal uit indien nodig als de spanning een kritische ondergrens dreigt te bereiken.
Een van de grootste voordelen van een borstelloze motor is dat er vrijwel geen slijtage of veroudering optreedt. Een motor met koolborstels loopt iedere keer dat je hem gebruikt, een klein stukje in prestatie terug. Hij loopt dus alleen maximaal als de borstels en de collector als nieuw zijn!
Een borstelloze motor heeft dit niet, zoals hij nu loopt, loopt hij in principe na 500 keer rijden nog net zo. Je hoeft dus geen koolborstels te vervangen, geen collector af te draaien, geen draaibank te hebben om je motoren in goede conditie te houden. Alleen maar af en toe schoonmaken en de lagers olin. Bovendien is de efficiency van dit soort motoren beter, hij loopt dus langer op een accu lading dan een motor met koolborstels met een vergelijkbare prestatie
Zoals gezegd wordt een borstelloze motor op een speciale manier aangestuurd, waarbij de regelaar de 3 spoelen precies op de juiste manier en frequentie aan moet sturen zodat ze de magneet van de rotor op het juiste moment aantrekken of aanstoten, zodat de rotor draait. Hoe meer toeren de motor maakt, hoe sneller de regelaar de spoelen moet aansturen. De regelaar moet dus op elk moment "weten" in welke positie de rotor staat t.o.v. de spoelen.
Dat kan op twee manieren:
SENSORLOZE MOTOR
Het nadeel was tot voor kort, dat de motor al "even" moet draaien voor de regelaar voor de regelaar de motor optimaal aan kan sturen. In boten en vliegtuigen was dat geen probleem: als je de motor start kwam het voor dat de motor eerst even aarzelend ging draaien, en zelfs even de verkeerde kant op ging draaien, voor alles goed ging. In boten en vliegtuigen kan een elektro motor eerst op toeren komen, voor de schroef energie gaat vragen, en blijft daarna vrijwel altijd dezelfde kant op draaien.
Bij auto's moet voor elke beweging die de motor wil maken, de hele auto direct mee verplaatst worden. Auto's moeten bovendien snel accelereren, hard remmen, en weer van stilstand of lage snelheid weg trekken. De eerste sensorloze motoren hadden hier problemen mee, dus dit vroeg toch om een andere benadering.
Motoren zonder sensor worden alleen maar met 3 dikke stroomdraden op de regelaar aangesloten MOTOR MET SENSOR
Dit is mogelijk gemaakt door een speciaal ontwikkelde chip en bijpassende software.
Het resultaat is inderdaad verbluffend als je de oude generatie sensorloze motoren kent!
En van de eerste regelaars met dit nieuwe principe is de nieuwe Corally BRL regelaar, die dus niet alleen heel betaalbaar is, maar ook de nieuwste generatie regelaars vertegenwoordigd. DELTA EN STER SCHAKELING
Er is ook verschil in hoe de 3 spoelen van de motor onderling aangesloten zijn. Dit kan als STER schakeling zijn, of als DELTA geschakeld. Zonder uitgebreid op dit moeilijke onderwerp in te gaan, is het zo dat een DELTA gewikkelde motor een vergelijkbaar vermogen levert als een STER gewikkelde motor met +/- 60% van het aantal wikkelingen. Dus een 10 wikkelingen DELTA gewikkelde motor is ongeveer vergelijkbaar met een 6 wikkelingen STER gewikkelde motor DELTA WIKKELING STER WIKKELING
Een 10 wikkelingen Delta is dus ongeveer vergelijkbaar met een 6 wikkelingen Ster) bij een iets hogere efficiency
Stergewikkelde motoren zijn een fractie minder efficiënt en hebben een vergelijkbaar vermogen als een Delta gewikkelde motor met +/ 65% meer wikkelingen FUNCTIES
Bij regelaars voor borstelloze motoren werkt dat heel anders, de motor draait links of rechtsom door de volgorde waarin de spoelen aangestuurd worden om te keren. Elke regelaar voor borstelloze motoren kan dus zowel vooruit of achteruit draaien, zonder dat dat invloed heeft op de efficiency van de regelaar. Er zijn een paar regelaar waar deze softwarematige draairichtings-omkering niet aangeroepen kan worden, maar bij 99.9% van de regelaars kan dat dus altijd. Maar omdat voor wedstrijd gebruik het soms niet toegestaan is, en het in sommige heel speciale toepassingen het wel eens handiger kan zijn dat de achteruit niet kan werken, is de achteruitfunctie vaak aan of uit te zetten
Andere Instelmogelijkheden zijn:
- Beperken van het maximale vermogen in de achteruit, zodat de auto niet overdreven hard achteruit schiet als je achteruit wilt
- LiPo accu's mogen niet verder dan 3.0V per cel ontladen worden. Je kunt vaak instellen of je met NiMh's rijd ( dan geen spanningsbewaking) of met 2 of 3 cellen LiPo accu's. In het laatste geval neemt de regelaar vermogen terug zodra de ondergrens van de accu's bereikt dreigt te worden, of stopt zelfs helemaal als de accu's te ver leeg raken.
- De Punch (agressiviteit van acceleratie) is ook aan te passen aan de omstandigheden. Borstelloze motoren zijn vaak zo sterk, dat het in bepaalde gevallen wel eens te veel kan zijn. Door de Punch terug te stellen, is de motor minder bruut en trekt rustiger op.
- De rem is vaak op 2 manieren in te stellen: op de eerste plaats kun je dan de maximale remwerking verminderen, om meer controle over de auto te houden. Vaak ook kun je minimale rem instellen, dus de mate waarin hij remt zodra je de rem gebruikt.
- Vaak is de z.g. dead band van de regelaar aan te passen, dus het gebied rond de neutraal waarin de regelaar nog niets doet. Daarmee kun je bv voorkomen dat de auto al wegrijdt als je maar naar de trekker kijkt
- Soms is het mogelijk de timing van de motor in te stellen. Meer timing geeft meer snelheid, minder timing iets meer rust en een lager stroomverbruik.
In veel gevallen moet je de regelaar programmeren door op een knopje te drukken, en dan een bepaalde sequens van knopje indrukken, lampje wat gaat branden, piepjes tellen etc. Dat kan nog wel eens lastig zijn, je moet alles precies op de juiste manier doen, en n vergissing betekent overnieuw beginnen.
Steeds meer regelaars echter worden met een z.g. programmeer kaart geleverd. Dat wordt wel een KAART genoemd, maar dat is eigenlijk niet de juiste benaming: het is meestal een klein kastje met drukknoppen en een lcd schermpje. Dat wordt aangesloten op de regelaar, en daarmee kun je alle functies heel makkelijk oproepen en aanpassen. Dus geen getob met boekjes lezen, piepjes tellen, weer overnieuw beginnen, maar gewoon door het menuutje lopen en de functie uitzoeken die je wilt, en dan de waarde veranderen. Om dat allemaal in te stellen hoef je dan dus geen geleerde te zijn, de programmeer unit wijst je vanzelf de weg!
OVERBRENGINGS VERHOUDING
Een groot verschil in gebruik tussen motor/regelaar met koolborstels en borstelloze motor/regelaar combinaties is het bepalen van de juiste overbrengings verhouding.
Zo'n conventionele regelaar "schakelt" op een vaste frequentie, waarbij bij weinig gas een korte puls gegeven wordt, en bij vol gas staat de eindtrap volledig open en schakelt hij helemaal niet meer. Zo'n regelaar wordt warm door het verlies wat er in de regelaar zit, maal de stroomsterkte (Ampres) door de eindtrap. Als dat te hoog is, ontstaat er te veel warmte. Door dan een kleiner motortandwiel te kiezen, wordt het motortoerental hoger, en daarmee het amprage wat door de regelaar loopt lager, zodat er minder warmte in de regelaar ontstaat.
Bij regelaars voor borstelloze motoren ligt dat anders, wat komt door een wezenlijk verschil in motor aansturing.
- Als de motor niet erg heet wordt, maar de regelaar wel, dan is het motortoerental te hoog. In dat geval moet je dus een GROTER motortandwiel monteren. Dit dus in tegenstelling van wat je zou verwachten als je een regelaar voor motoren met borstels gewend bent
- Wordt de motor heet, maar de regelaar niet, dan wordt de motor te zwaar belast, en moet je een kleiner tandwiel monteren.
- Worden zowel de motor als de regelaar te heet, dan is het hele systeem te zwaar belast, ook dan kun je proberen wat er gebeurt als je een kleiner motortandwiel monteert. Als zowel de motor als de regelaar dan minder warm worden, is het goed.
- Zowel de motor als de regelaar mogen beslist niet warmer worden dan 100 graden Celsius, maar minder is aan te bevelen.
80 graden is wel aanvaardbaar.
" basis info"