Ik wil binnen een week een vliegend LB model hebben.
Dat gaat lukken met een Elapor model.
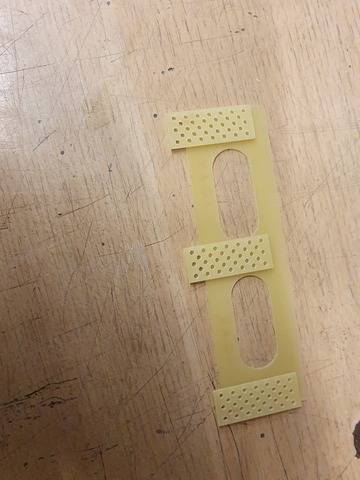
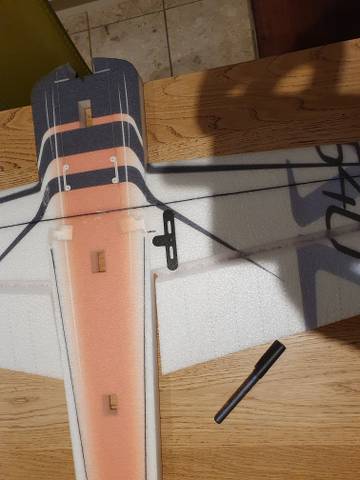
Het voelt wat vreemd een bellcrank op een 3 D model.
In eerst instantie leek de bellcrank wat groot maar zo met een vleugel eronder lijkt de bellcranck bruikbaar.
Om te beginnen zet ik eerst de Ailerons ( Flaps ) vast en maak alleen het hoogteroer bedienbaar.
Wordt vervolgd.


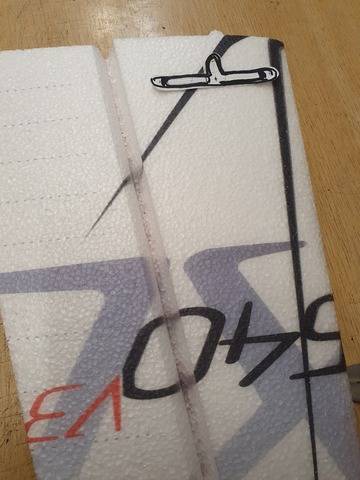
") ) waar de -interne- leadout-guide helemaal los hing.
) waar de -interne- leadout-guide helemaal los hing. Buitengewoon bizarre reacties op de besturing.
Buitengewoon bizarre reacties op de besturing.