stef stuntpiloot
Forum veteraan
Ik heb het scherm intussen al twee jaar maar ik heb nu eindelijk tijd vrij gemaakt om het apparaat af te bouwen!
Het idee: Een RC paramotor maken die kan functioneren als een alternatief op multicopters of vliegtuigen voor duurvluchten. Het toestel moet dus zelfstandig kunnen werken en een camera mee kunnen nemen.
De voordelen van een paramotor ten opzichte van een multicopter of vliegtuig:
- Voordelig voor zijn formaat (vleugeloppervlak)
- Efficient (kost weinig energie om te laten vliegen vergeleken met een multicopter)
- Heel compact te transporteren
- Erg lange vluchttijden mogelijk
- Erg stil (zeker met de gekozen propeller)
Dus het scherm dat ik ga gebruiken, Opale FOX RS 2.6:



Dit scherm is 4 meter breed en kan beladen worden met maximaal 7 kg
Ik heb een jaar ofzo geleden een concept gemaakt van de aandrijving die er onder komt te hangen, dit gaat wel behoorlijk veranderen maar voor het idee:
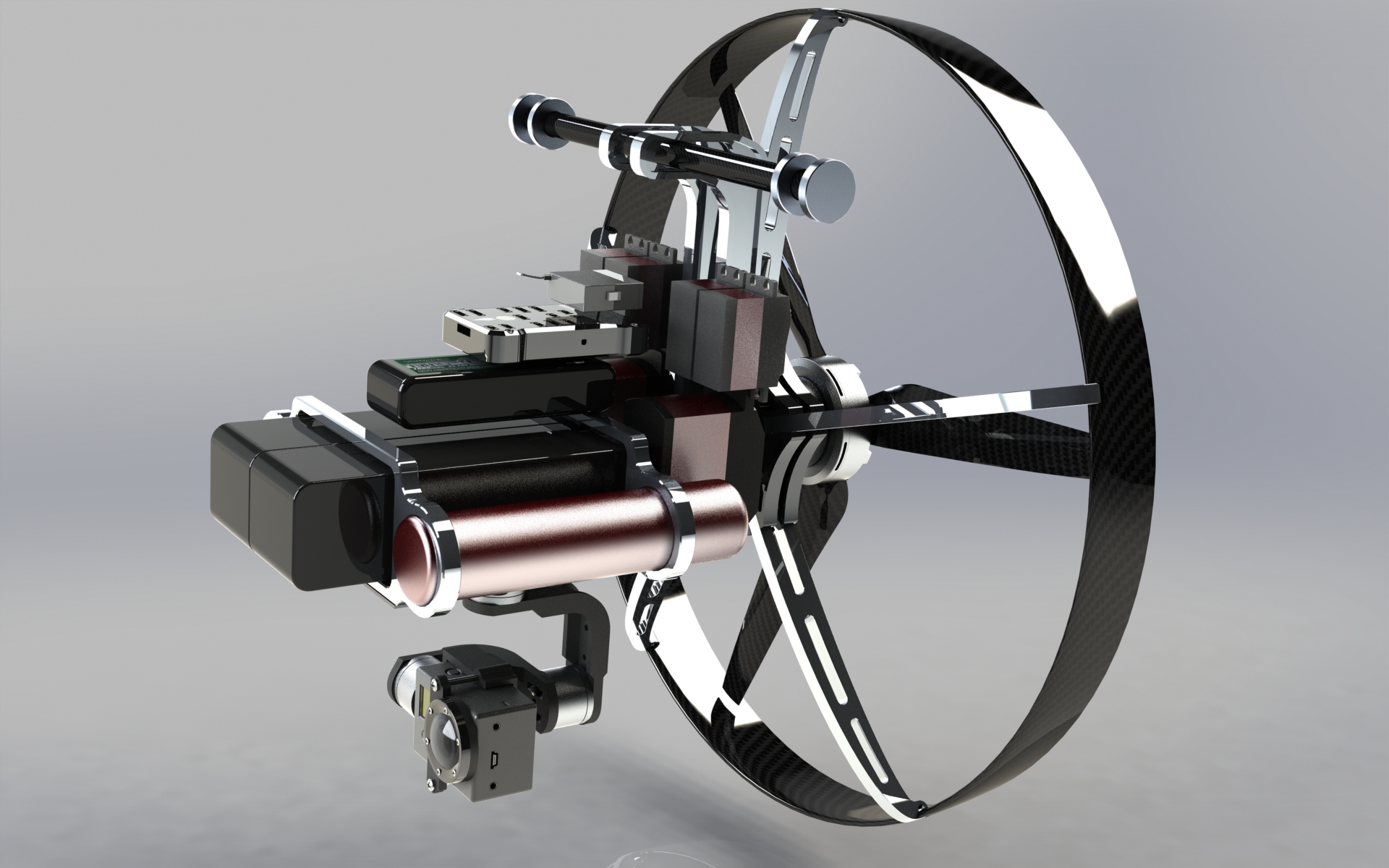
Een paar dingen die ik er aan ga veranderen zijn:
- Hangpunt aan het scherm wordt instelbaar en met twee servo's bedienbaar (voor gewicht verplaatsing sturen)
- Gimbal wordt intrekbaar om hem tijdens landingen te beschermen
- Flightcontroller wordt een pixhawk mini
- Ik wil de "airbag" landings bescherming vervangen voor een trike landingsgestel
- Ik neem geen 3blads prop maar een twee blads propeller, de kooi wordt aerodynamisch om zo torque steering tegen te gaan
Ik heb gisteren een boel onderdelen besteld, wat er voor nu in gaat komen:
1x - Pixhawk mini controller (met current sensor, airspeed sensor en GPS)
1x - Plush 100A ESC
1x - YEP 20A BEC
1x - Aerodrive 5065 320Kv motor
1x - Xoar 18x10 propeller
2x - 6S 10.000 mAh accu
2x - TS700MG servo (weightshift steer)
2x - HK15138 servo (brake lines)
2x - 9gram servo (speedbar)
2x - 9gram servo (big ears)
Gimbal ben ik nog niet over uit. Het inklap systeem voor de gimbal en landingsgestel moet ik ook nog uitwerken. Eerst maak ik een concept versie met wel de electronica er in van de uiteindelijke versie. de complexe dingen rondom de gimbal komen als hij lekker vliegt. De flightcontroller is ook nog wel wat uitdaging aangezien een paramotor heel anders aangestuurd moet worden dan een vliegtuig, heli of multicopter.
Lijkt het jullie leuk als ik hier een uitgebreid bouwverslag van maak?
Het idee: Een RC paramotor maken die kan functioneren als een alternatief op multicopters of vliegtuigen voor duurvluchten. Het toestel moet dus zelfstandig kunnen werken en een camera mee kunnen nemen.
De voordelen van een paramotor ten opzichte van een multicopter of vliegtuig:
- Voordelig voor zijn formaat (vleugeloppervlak)
- Efficient (kost weinig energie om te laten vliegen vergeleken met een multicopter)
- Heel compact te transporteren
- Erg lange vluchttijden mogelijk
- Erg stil (zeker met de gekozen propeller)
Dus het scherm dat ik ga gebruiken, Opale FOX RS 2.6:
Dit scherm is 4 meter breed en kan beladen worden met maximaal 7 kg
Ik heb een jaar ofzo geleden een concept gemaakt van de aandrijving die er onder komt te hangen, dit gaat wel behoorlijk veranderen maar voor het idee:
Een paar dingen die ik er aan ga veranderen zijn:
- Hangpunt aan het scherm wordt instelbaar en met twee servo's bedienbaar (voor gewicht verplaatsing sturen)
- Gimbal wordt intrekbaar om hem tijdens landingen te beschermen
- Flightcontroller wordt een pixhawk mini
- Ik wil de "airbag" landings bescherming vervangen voor een trike landingsgestel
- Ik neem geen 3blads prop maar een twee blads propeller, de kooi wordt aerodynamisch om zo torque steering tegen te gaan
Ik heb gisteren een boel onderdelen besteld, wat er voor nu in gaat komen:
1x - Pixhawk mini controller (met current sensor, airspeed sensor en GPS)
1x - Plush 100A ESC
1x - YEP 20A BEC
1x - Aerodrive 5065 320Kv motor
1x - Xoar 18x10 propeller
2x - 6S 10.000 mAh accu
2x - TS700MG servo (weightshift steer)
2x - HK15138 servo (brake lines)
2x - 9gram servo (speedbar)
2x - 9gram servo (big ears)
Gimbal ben ik nog niet over uit. Het inklap systeem voor de gimbal en landingsgestel moet ik ook nog uitwerken. Eerst maak ik een concept versie met wel de electronica er in van de uiteindelijke versie. de complexe dingen rondom de gimbal komen als hij lekker vliegt. De flightcontroller is ook nog wel wat uitdaging aangezien een paramotor heel anders aangestuurd moet worden dan een vliegtuig, heli of multicopter.
Lijkt het jullie leuk als ik hier een uitgebreid bouwverslag van maak?
Laatst bewerkt:
")