serge pot
Forum veteraan
Na de door eigenschuld plat gevlogen Piper van me kreeg ik een telefoontje van Sebastiaan van RC-Europe of ik interesse had om voor hem een Piper te bouwen . Hiermee kan ik dus tijdens de bouw eventuele punten veranderen/verbeteren . Nou daar hoefde ik dus niet over te twijfelen . Het zou dus een proefexemplaar betreffen welke de bouwwijze versimpeld is en de bedoeling om hem te kunnen uitrusten van 20 tot 50 cc zodat het ook een werkpaard wordt van 240cm spanwijdte . Tevens is de opzet zo dat hij door iedereen gebouwd en gevlogen kan worden in 2 weken bouwtijd . Ook is de romp verbreed voor beter bereikbaarheid om de servo's en apparatuur kwijt te kunnen .
Zo gezegd en wat heen en weer gemail kon ik de eerste onderdelen ophalen .

Natuurlijk is het proces van een lasersnijder geweldig mooi om te zien . Binnen een 30 minuten lagen alle onderdelen klaar voor de romp .
Thuis aangekomen gelijk de tr32 op het motorspant gepast . Deze behoefde wat aanpassingen . 30mm verder terug in de romp en dan past hij direct op het motorspant zonder de afstands steunen in te korten . De tr32 is qua maatvoering gelijk aan de DLE30 .
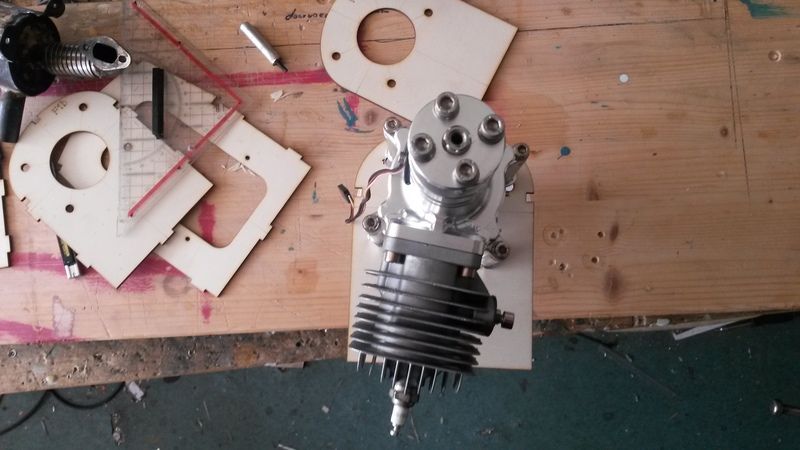
De motor wordt gekanteld geplaatst omdat de originele potjes bij deze motoren heel direct weggemikt worden . hierdoor kun je een bocht kwijt en kun je de demper in de romp kwijt . Hierdoor zal het geluid ook een stuk aangenamer worden
De romp zijkanten en onderkant worden verlijmd met een zigzag profiel .

wat ik doe is dit punt verlijmen met groene zap en bijna direct schuren zodat het houtstof in de lijm komt en voor extra binding zorgt . Dit doe ik aan beide kanten zowel binnen als buiten . papiertape aan de onderzijde voorkomt verschuiven en verlijmen van de delen aan het werkblad .

Natuurlijk eerst alle spanten droog op passing controleren op de romp zijkanten en onder plaat (elastiek is uw goede vriend ). Hierbij bleek dat alle staartspanten een 2 mm naar beneden moesten . Dat was dus even vijlen en doorgegeven aan RC-Europe welke dus gelijk de tekening heeft aangepast .Is ook een heerlijk contact met Sebastiaan .
Zo gezegd en wat heen en weer gemail kon ik de eerste onderdelen ophalen .

Natuurlijk is het proces van een lasersnijder geweldig mooi om te zien . Binnen een 30 minuten lagen alle onderdelen klaar voor de romp .
Thuis aangekomen gelijk de tr32 op het motorspant gepast . Deze behoefde wat aanpassingen . 30mm verder terug in de romp en dan past hij direct op het motorspant zonder de afstands steunen in te korten . De tr32 is qua maatvoering gelijk aan de DLE30 .

De motor wordt gekanteld geplaatst omdat de originele potjes bij deze motoren heel direct weggemikt worden . hierdoor kun je een bocht kwijt en kun je de demper in de romp kwijt . Hierdoor zal het geluid ook een stuk aangenamer worden
De romp zijkanten en onderkant worden verlijmd met een zigzag profiel .

wat ik doe is dit punt verlijmen met groene zap en bijna direct schuren zodat het houtstof in de lijm komt en voor extra binding zorgt . Dit doe ik aan beide kanten zowel binnen als buiten . papiertape aan de onderzijde voorkomt verschuiven en verlijmen van de delen aan het werkblad .

Natuurlijk eerst alle spanten droog op passing controleren op de romp zijkanten en onder plaat (elastiek is uw goede vriend ). Hierbij bleek dat alle staartspanten een 2 mm naar beneden moesten . Dat was dus even vijlen en doorgegeven aan RC-Europe welke dus gelijk de tekening heeft aangepast .Is ook een heerlijk contact met Sebastiaan .







") Choke zit bij mij ook met een stangetje!
Choke zit bij mij ook met een stangetje!")



















