Wellict ten overvoelde het gehele verhaal
Voorbereiden
Voor je begint met het afstellen van de helikopter maken je de drie draden die de motor verbinden met de stroomverdeler los en houd je de zender paraat. Soms is enige kracht nodig die draden los te maken (uit elkaar trekken). Het is echter niet wijs dat niet te doen, wil je veilig aan de slag gaan.
Initialisatie
Steeds als je controleert welke effect een (gewijzigde) instelling heeft voeren je de volgende actie uit:
1. Maak de verbinding met de accu los, als deze al is aangesloten;
2. Plaats alle sticks en alle trims in het midden, behalve de ‘throttle-trimmer’ die trek je naar je toe;
3. Zet de ‘idle up’ schakelaar, links boven op je zender, op normaal vliegen (duw deze schakelaar van je af);
4. Zet beide draaiknoppen (pitch en gyro) op de middelste stand;
5. Zet de zender aan en wacht totdat deze gereed is (het lampje op de zender niet meer knippert);
6. Sluit de accu aan op de helikopter. Als gevolg daarvan worden ondermeer alle servo’s automatisch in de neutrale stand geplaatst.
Steeds als je controleert welke effect een (gewijzigde) instelling heeft voer je deze acties uit. In de volgende paragrafen worden deze acties aangeduid met een van initialiseren. Zie je een in de tekst, voer dan de hiervoor beschreven acties uit.
De staartservo
De staartservo hangt aan de staartbuis van je helikopter. Hij zit vast aan twee beugeltjes, die je over de staartbuis kunt verschuiven als je de schroefjes een slagje losschroeft. Het servo-armpje moet zo haaks mogelijk op de lange kant van de servo staan en de ‘tailpitch-slider’ dient aan beide zijden dezelfde ruimte te hebben. Is dat niet zo volg dan de volgende stappen:
1. Voer de eerder beschreven initialisatie actie uit;
2. Staat het servo-armpje niet haaks op de lange kant van de servo maak dan het servo-armpje los en zet hem er weer zo haaks mogelijk op waarna je hem vastschroeft;
3. Controleer daarna de juiste instelling nog een keer, nadat je actie nogmaals hebt uitgevoerd.
Nu gaan we controleren of de ‘tailpitch-slider’ de juiste ruimte heeft op de staartas:
1. Voer de eerder beschreven initialisatie actie uit;
2. Zet ‘rudder-trimmer’ op je zender op het middelste punt;
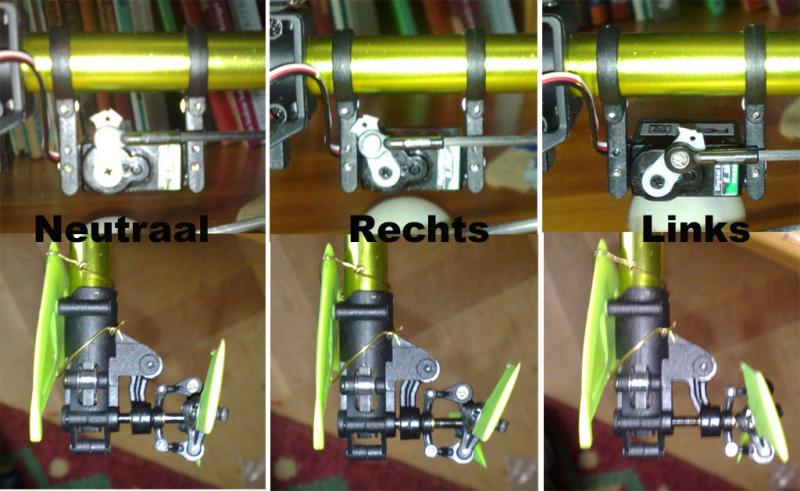
3. Controleer of de afstand op de ‘cross shaft’ aan beide zijden dezelfde is. Met ander woorden: na de initialisatie actie moet er evenveel vrije ruimte aan beide kanten van de ‘tailpitch-slider’ zijn;
4. Is dat niet zo maak dan de schroefjes die in de twee beugeltjes zitten waaraan de servo hangt zo los dat je de servo een beetje kunt verschuiven. Let op eigenlijk verschuif je de servo met alles wat eraan vast zit. Maak vervolgens de beugeltjes weer vast;
Controleer vervolgens of het servo-armpje zo haaks mogelijk op de lange kant van de servo staat en het asje van de staartrotor exact de juiste vrije ruimte heeft (zie voorgaande foto). Denk eraan eerst de eerder beschreven initialisatie actie uit te voeren. Staat het servo-armpje niet zo haaks mogelijk op de lange kant van de servo begin dan opnieuw.
Mocht het na het opstijgen straks zo zijn dat de staart toch een bepaalde kant op beweegt. Los dat in eerste instantie dan op met de trimmer op de zender. Land vervolgens en verschuif de staartservo een klein stuk je de juist kant op. Zet de trimmer weer in het midden en controleer ook weer de ‘limit’ (zie betreffende paragraaf).
De ‘Head lock Gyro’
De ‘Head lock Gyro’ bevindt zich tussen de controller en de staartservo. Het doel is ongewenste rotatie, bijvoorbeeld tengevolge van invloeden door de wind, op te vangen. De ‘Head lock Gyro’ die in de Belt CP V2 zit (de EK2-0704B) stopt genoemde ongewenste rotatie en zorgt er tevens voor dat de helikopter onmiddellijk terugkeert naar zijn oorspronkelijke positie. Dit gaat zo snel dat je dat bijna niet merkt. De oudere versies van de ‘Gyro’ stopte alleen de ongewenste rotatie, maar liet de helikopter niet terugkeren naar zijn oorspronkelijke positie.
Zoals gezegd is de staartservo verbonden met de ‘Gyro’ en de ‘Gyro’ met de controller. In feite stuurt de ‘Gyro’ dus de servo aan. Van belang is dat de staartservo goed is gepositioneerd en dat hij zijn uitslagen, binnen de gehele beschikbare vrije ruimte op de ‘cross shaft’, kan overbrengen op de staartrotor. Een eerste stap in het afstellen van de ‘Gyro’ is dus het correct afstellen van de servo en de plaats van de ‘tailpitch-slider’ op de staartbuis. Dit laatste hebben we in de voorgaande paragraaf gedaan.
De ‘limit’ afstellen
Nu gaan we de limit van de ‘Gyro’ afstellen. Betreffende potentiometer zit op de ‘Gyro’. Doel van het afstellen van de limit is de gehele vrije ruimte op de ‘tailshaft’ te benutten, niet meer en niet minder. Je doet dat als volgt:
1. Voer de eerder beschreven initialisatie actie uit;
2. Zet ‘rudder-trimmer’ op je zender op het middelste punt;
3. Maak een volledige uitslag van je rudder-stick naar rechts. De vrije ruimte op de ‘tailshaft’ aan de rechterkant moet nu zo minimaal mogelijk zijn, echter de ‘tailpitch-slider’ mag nooit een van de zijkanten raken. Gebeurt dat wel, dan zal de servo een brommend geluid maken. Heb je te veel of te weinig ruimte draai dan aan genoemde potentiometer. Draai je met de wijzers van de klok (+) mee dan wordt de ruimte kleiner v.v. Met andere woorden de uitslag die wordt gemaakt wordt groter c.q. kleiner;
4. Heb je een en ander aangepast voer dan de eerder beschreven initialisatie actie uit en controleer of je nieuwe instelling goed is;
Punt 3 controleer je vervolgens ook voor de linkerkant. Heb je aan één kant meer of minder ruimte dan bevindt de staartservo zich niet exact in het midden. Ga terug naar de vorige paragraaf om dit te herstellen als de afwijking groot is of zorg er in ieder geval voor dat de ‘tailpitch-slider’ aan geen beide zijden de constructie raakt.
De ‘delay’ afstellen
Nu gaan we de delay van de ‘Gyro’ afstellen. Betreffende potentiometer zit op de ‘Gyro’. Doel van het afstellen van de delay (vertragingstijd) is er voor zorgen dat de staart van de helikopter stabiel blijft. Met andere woorden: meer of minder gevoelig wordt. Deze instelling kun je ook tijdens de vlucht op de zender bijstellen, met behulp van betreffende draaiknop. Het instellen doe je als volgt:
· Als de staart tijdens de vlucht een beetje van links naar rechts waggelt en kun je dat niet corrigeren, dan dien je ‘delay’ iets losser te zetten (-). De ‘Gyro’ zorgt er dan voor dat de staart actiever maar minder stabiel wordt.
· Als de staart tijdens de vlucht een ernstig naar links en naar rechts beweegt en kun je dat niet corrigeren, dan dien je de ‘delay trimmer’ iets vaster te zetten (+). De ‘Gyro’ zorgt er dan voor dat de staart zich stabieler gedraagt maar ook dat de reactie minder actief wordt.
Groeten
Martin
Oke vandaag verder gegaan met het afstellen van de tail pitch. Met 0 pitch op de tail rotor moest ik mijn trim volledig naar rechts zetten en zelfs nog een beetje meesturen met de rudder naar rechts om hem redelijk koersvast te houden. Dus alles verschoven zodat er wat meer pitch naar rechts staat (vanaf achteren gezien), in de hover (zo goed en zo kwaad als dat gaat na 2x10 minuten vliegtijd in totaal op mijn eerste heli) ook nu moest ik weer de trim helemaal naar rechts zetten maar was toen ook redelijk goed koersvast. Weer de servo verplaatst om op dezelfde plaats uit te komen qua tail pitch. ook moest toen de limit instelling worden aangepast, aan de linkerkant kwam hij tegen de root van de tailshaft. Ik moest de limit compleet naar de - zijde draaien en zelfs dan nog begint hij een klein beetje te brommen bij volledige uitslag. Maar kan dus niet verder limiten. Ow en ik heb binnen gevlogen dus wind is geen factor.
Hebben andere dit ook?
Waar zou het aan kunnen liggen?
Of hoef ik me hierover niet druk te maken?
De main rotor pitch staat volgens mij helemaal goed afgesteld, alles level in midstick idle up. Alles op 0 pitch. In niet idle up mode heb ik dan een paar graden + pitch als de throttle op z'n laagst staat.
")