In september 2010 ben ik van start gegaan met het arducopter project.
Ondertussen na veel schroeven en alu armpjes zijn we via Arducopter RC1/ArducopterNG/Ardupirate 527 uiteindelijk terecht gekomen bij de Arducopter Mega code die weliswaar nog in beta is.
zijn we via Arducopter RC1/ArducopterNG/Ardupirate 527 uiteindelijk terecht gekomen bij de Arducopter Mega code die weliswaar nog in beta is.
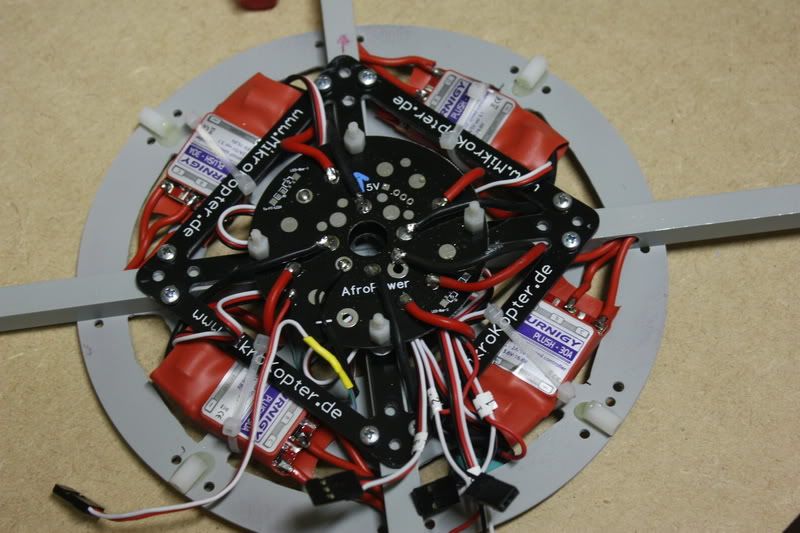
Het frame is een standaard MK50 frame met enkele aanpassingen waaronder sterkere centerplates en een diy power distri.
Motoren zijn KDA 20-22L initieel gestuurd door cheapo ESC maar nu met veel betere prestaties overgeschakeld naar the 30A Plush ESC van Turnigy.
Props zijn APC 10x4.7. Heb ook de EPP's gebruikt maar ben tot de constatie gekomen dat deze broos zijn.
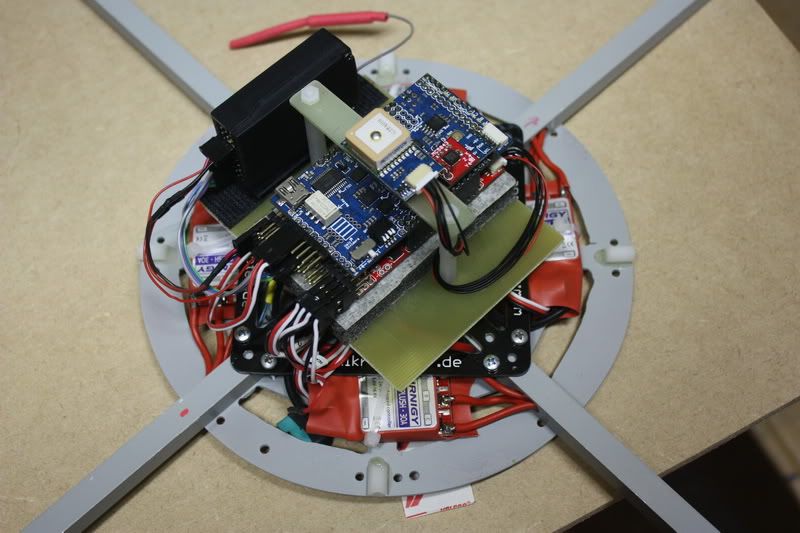
Verdere zit de APM 2560 bord erin gekoppeld met de IMU H.
De quad is nog uitgerust met de mediatek GPS, 900Mhz Xbee, sonar en kompas. Ook heb ik een vaste bevestiging voorzien voor een Gopro.
Als batt gebruik ik een 3S 3300mAh 25C en soms een 3S 5000mAh 25C.
De zender is een Eurgle 9X ondertussen geflashed naar de ER9X.
Hier enkele video's met vluchten met verschillende software versies.
Ondertussen doen we lekker verder")
Ardupirate NG 4/3/2011 on Vimeo
Ardupirate r527 test / GPS-Alt hold on Vimeo
Arducopter 2.0.37 beta alt hold and loiter on Vimeo
Ondertussen na veel schroeven en alu armpjes
zijn we via Arducopter RC1/ArducopterNG/Ardupirate 527 uiteindelijk terecht gekomen bij de Arducopter Mega code die weliswaar nog in beta is.Het frame is een standaard MK50 frame met enkele aanpassingen waaronder sterkere centerplates en een diy power distri.
Motoren zijn KDA 20-22L initieel gestuurd door cheapo ESC maar nu met veel betere prestaties overgeschakeld naar the 30A Plush ESC van Turnigy.
Props zijn APC 10x4.7. Heb ook de EPP's gebruikt maar ben tot de constatie gekomen dat deze broos zijn.
Verdere zit de APM 2560 bord erin gekoppeld met de IMU H.
De quad is nog uitgerust met de mediatek GPS, 900Mhz Xbee, sonar en kompas. Ook heb ik een vaste bevestiging voorzien voor een Gopro.
Als batt gebruik ik een 3S 3300mAh 25C en soms een 3S 5000mAh 25C.
De zender is een Eurgle 9X ondertussen geflashed naar de ER9X.
Hier enkele video's met vluchten met verschillende software versies.
Ondertussen doen we lekker verder
Ardupirate NG 4/3/2011 on Vimeo
Ardupirate r527 test / GPS-Alt hold on Vimeo
Arducopter 2.0.37 beta alt hold and loiter on Vimeo

")