Voor mijn profielwerkstuk (soort "eindwerkstuk" voor havo/vwo) wou ik eigenlijk een Battlebot maken, dit omdat ik hier al aardig wat ervaring mee heb, en het natuurlijk een goed excuus is om er nog meer te bouwen. Maar jammer genoeg was mijn leraar het hier niet mee eens, hij vond het "te moeilijk" En ik kon hem op dat moment niet overtuigen dat het niet zo was.
Omdat ik gewoon erg leuk vind om dingen te maken, kwam ik op het idee om dan maar een RC offroad auto te gaan maken.
Maar omdat ik eigenlijk totaal geen ervaring daar mee had, en ik het (nu gezien) het gruwelijk heb onderschat Begon ik en mijn team genoten, maar eens even stevig te brainstromen.
Begon ik en mijn team genoten, maar eens even stevig te brainstromen.
Omdat ik toch niet mee ging doen met officiele wedstrijden etc, vond ik de 540 size maar een beetje te klein. Mijn eerste idee was dus ook een twin speed 900 op 12V die ruwweg 1.4kW zou produceren. Maar al heeel erg snel kwam ik er achter dat, dat natuurlijk niet echt haalbaar was, vanwege gewicht, accuduur, etc. En omdat ik toch iets "extreems" wou als aandrijving, en ik tijdelijk geen ideen meer had, heb ik dat onderdeel even laten zitten.
Na veel gekeken te hebben op andere forums kwam ik eigenlijk tot de conclusie dat vrij weing andere mensen zelf een RC auto hadden gebouwd. Ik had niet echt veel dingen om van af te kijken.
Mijn eerste redding kwam, toen een vriend van mijn vader vroeger handelde in 1:4/1:5 onroad auto's. Hij had vroeger ook een winkel gehad en had nog wel wat onderdelen (van 1:10 en 1:8) auto's liggen. Dingen zoals fusees, innerdrivejoints, oneway axle (dingen die ik zelf niet zou kunnen maken) waren nu geen probleem meer. En ik had wat uitgangspunten om verder te gaan ontwerpen. Materialen die ik wou gaan gebruiken was Glasvezelplaaten (GFK) en Carbonplaten (CFK)
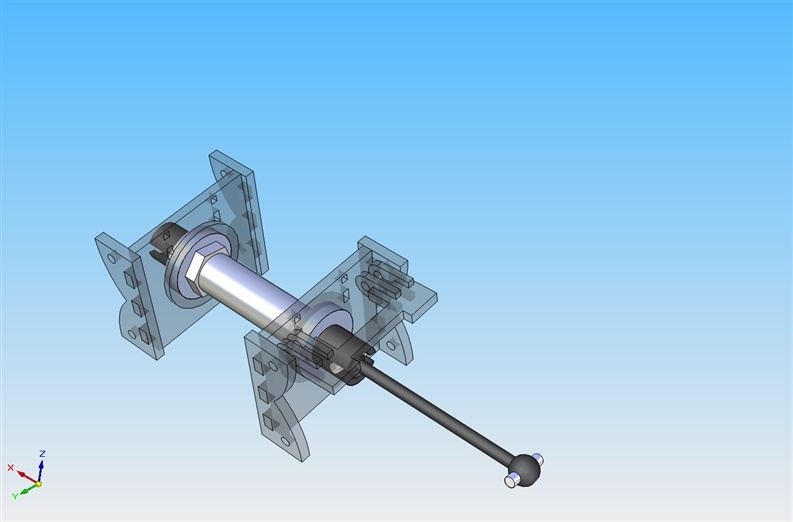
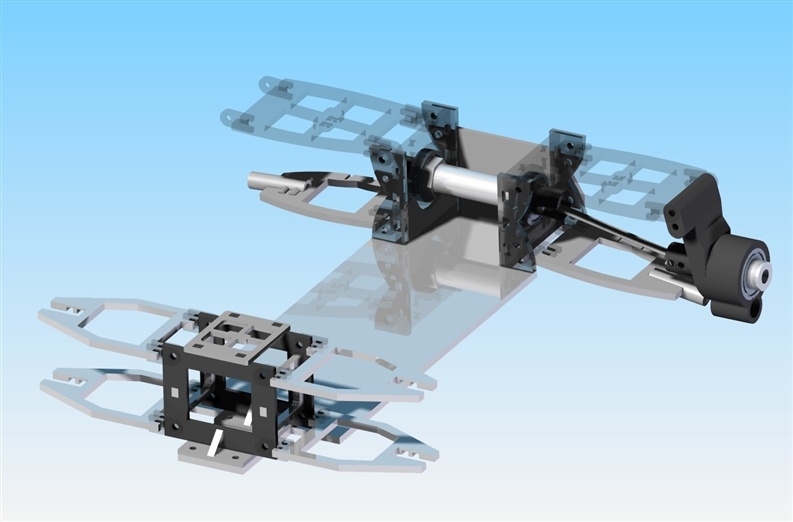
Mijn eerste ontwerp voor de achter aandrijving.
Met fusee erbij
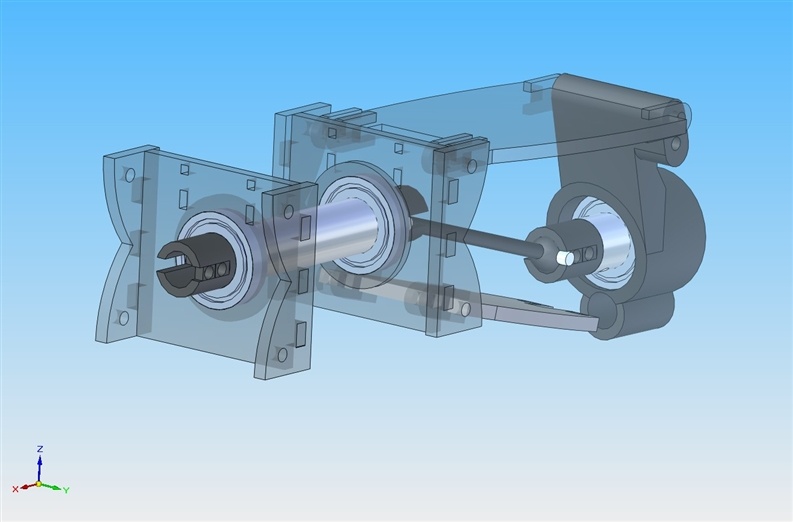
Links en rechts.
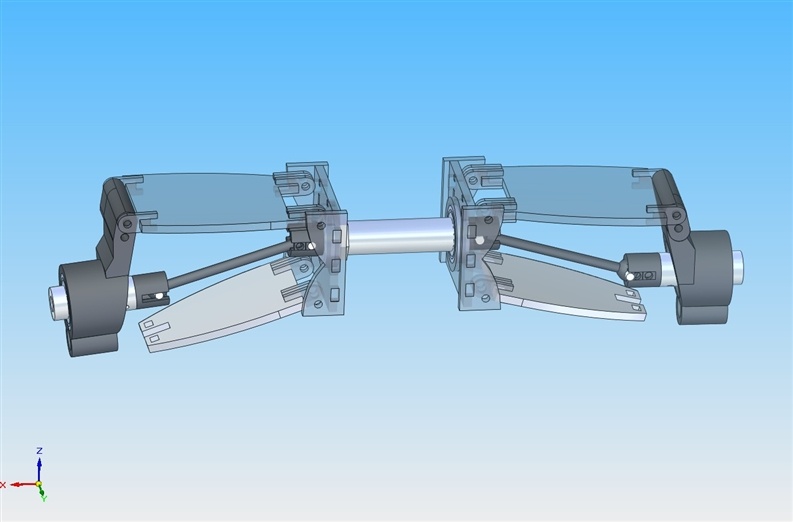
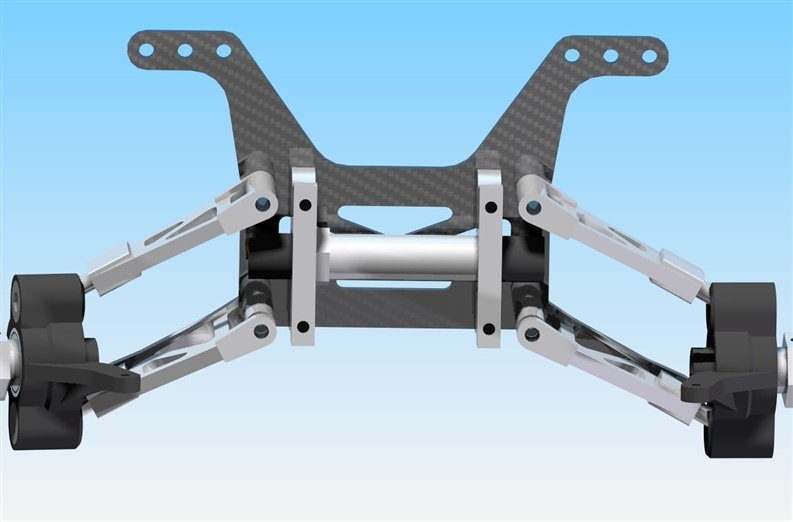
Met de voorophanging
Toen kwam er een aardig pijnlijk moment. Ik had de stukken allemaal uitgefreest (uit hout) en ik kwam er achter dat het toch eigenlijk niet aan mijn verwachtingen voldeed, (het was zelfs rond uit slecht) Dingen waren te slap, het werkte gewoon niet lekker. En het was allemaal net een klein beetje te klein.
(hier komt nog een foto van hoe het eruitzag na dat ik het heb uitgefreest)
Dingen moesten dus radicaal veranderen. Enkele dingen bleven nog maar over van het huidige idee. Dus na een tijd brainstormen, CAD-en kwam ik op het volgende :
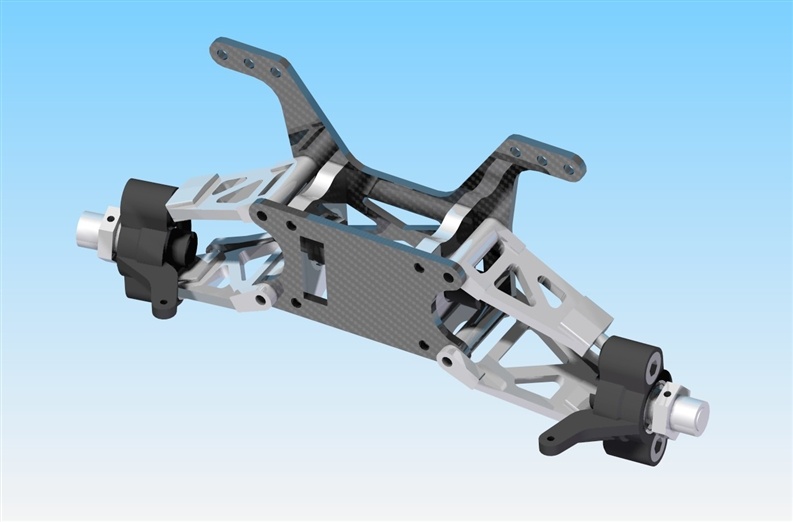
*note; Hier voor dat nog een andere versie, met OA andere boven draag armen. Maar die versie bleek na dat ik hem heb uitgefreest niet aan mijn verwachtingen te voldoen het geheel was niet solide en het schudde teveel)
*note 2 Ook de materialen zijn veranderd, ik gebruik nu 4 en 6 mm Aluminum en 3mm Carbon.
Deze versie moet ik nog opnieuw uitfrezen, maar ik denk dat deze perfect is.
Om het geheel nog een beetje uniek te houden, kwamen we op het idee om de voorophanging en de achterophanging (bijna) identiek te maken. Dit geeft een hele range van nieuwe mogelijkheden.
A: het bespaart veel tijd(en tijd is kostbaar atm)
B: 4WD gestuurd
C: 4WD aangedreven
Enige paar dingen die verschillend zijn:
de veren achter zijn 15MM langer, en achter komt een starre achter as, en vooraan heb ik een as met 2 one way lagers. die dus werken als een "slechte" differentieel.
Aandrijving
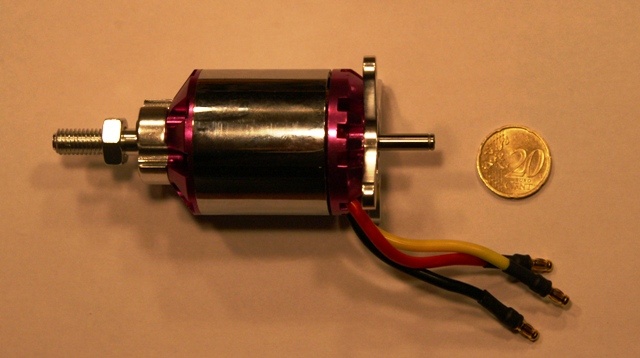
Omdat ik achter een starre achter as wou, betekend dat automatisch eigenlijk dat ik vrij veel power nodig heb. Na een tijd zoeken, en rondvragen kreeg ik de tip om eens op Unitedhobbies.com te kijken, omdat daar alles erg goedkoop is. Toen kwam eigenlijk direct het idee om een Brushless motor te gaan gebruiken.
Mijn oog viel direct op deze outrunner.

Model: HXT 42-63A
Speed : 600Kv
Max Efficiency : 38A
Max Load : 50A
Weight : 278grams
Thrust : 900~3000gr (12x8 Prop)
Voltage Range : 9~18
No Load Current : 6.3A
Power: 900W
Shaft: 5mm
ESC Required : 70A
In combinatie met deze speedo

High rate (10 KHz) switching (PWM)
3 to 6 Li-poly cells with receiver.
Dynamic braking ensures prompt prop folding.
BEC (2.0A) provides power to receiver and servos.
Over temperature protection.
User programmable Features.
Low-voltage protection - Programmable
Cutoff can be programmed for motor stop or reduced power.
Brake Type.
Throttle Range.
Timing Advance.
Safe “power on?arming program.
Low torque “soft start?prevents damage to fragile gearboxes.
Auto shut down in 4sec after signal is lost or radio interference becomes severe.
Microprocessor controlled.
Programmable rotation.
Ik heb direct voor de sturing van beide wielen 2 sterke servos gekocht met metal gears (10kg kerels)
Vrijdag zijn deze dingen allemaal binnen gekomen, en ik ben aangenaam verrast, alles ziet er goed uit.
Ik heb juist gekozen voor een laag aantal rpm/V omdat in mijn ogen, een hoog RPM alleen maar nadelig is. Want, je moet dan een dikke vertraging maken = meer ruimte minder effiecient. en er kan meer kapot gaan. En het is een outrunner geworden vanwege het hoge koppel. De aandrijving hier wordt voorzien van Tandriemen, met een vertraging van 1:2,64
Tot zover ben ik gekomen, ik ga dit topic updaten wanneer ik natuurlijk weer wat verder ben")
Omdat ik gewoon erg leuk vind om dingen te maken, kwam ik op het idee om dan maar een RC offroad auto te gaan maken.
Maar omdat ik eigenlijk totaal geen ervaring daar mee had, en ik het (nu gezien) het gruwelijk heb onderschat
Begon ik en mijn team genoten, maar eens even stevig te brainstromen. Omdat ik toch niet mee ging doen met officiele wedstrijden etc, vond ik de 540 size maar een beetje te klein. Mijn eerste idee was dus ook een twin speed 900 op 12V die ruwweg 1.4kW zou produceren. Maar al heeel erg snel kwam ik er achter dat, dat natuurlijk niet echt haalbaar was, vanwege gewicht, accuduur, etc. En omdat ik toch iets "extreems" wou als aandrijving, en ik tijdelijk geen ideen meer had, heb ik dat onderdeel even laten zitten.
Na veel gekeken te hebben op andere forums kwam ik eigenlijk tot de conclusie dat vrij weing andere mensen zelf een RC auto hadden gebouwd. Ik had niet echt veel dingen om van af te kijken.
Mijn eerste redding kwam, toen een vriend van mijn vader vroeger handelde in 1:4/1:5 onroad auto's. Hij had vroeger ook een winkel gehad en had nog wel wat onderdelen (van 1:10 en 1:8) auto's liggen. Dingen zoals fusees, innerdrivejoints, oneway axle (dingen die ik zelf niet zou kunnen maken) waren nu geen probleem meer. En ik had wat uitgangspunten om verder te gaan ontwerpen. Materialen die ik wou gaan gebruiken was Glasvezelplaaten (GFK) en Carbonplaten (CFK)
Mijn eerste ontwerp voor de achter aandrijving.
Met fusee erbij
Links en rechts.
Met de voorophanging
Toen kwam er een aardig pijnlijk moment. Ik had de stukken allemaal uitgefreest (uit hout) en ik kwam er achter dat het toch eigenlijk niet aan mijn verwachtingen voldeed, (het was zelfs rond uit slecht) Dingen waren te slap, het werkte gewoon niet lekker. En het was allemaal net een klein beetje te klein.
(hier komt nog een foto van hoe het eruitzag na dat ik het heb uitgefreest)
Dingen moesten dus radicaal veranderen. Enkele dingen bleven nog maar over van het huidige idee. Dus na een tijd brainstormen, CAD-en kwam ik op het volgende :
*note; Hier voor dat nog een andere versie, met OA andere boven draag armen. Maar die versie bleek na dat ik hem heb uitgefreest niet aan mijn verwachtingen te voldoen het geheel was niet solide en het schudde teveel)
*note 2 Ook de materialen zijn veranderd, ik gebruik nu 4 en 6 mm Aluminum en 3mm Carbon.
Deze versie moet ik nog opnieuw uitfrezen, maar ik denk dat deze perfect is.
Om het geheel nog een beetje uniek te houden, kwamen we op het idee om de voorophanging en de achterophanging (bijna) identiek te maken. Dit geeft een hele range van nieuwe mogelijkheden.
A: het bespaart veel tijd(en tijd is kostbaar atm)
B: 4WD gestuurd
C: 4WD aangedreven
Enige paar dingen die verschillend zijn:
de veren achter zijn 15MM langer, en achter komt een starre achter as, en vooraan heb ik een as met 2 one way lagers. die dus werken als een "slechte" differentieel.
Aandrijving
Omdat ik achter een starre achter as wou, betekend dat automatisch eigenlijk dat ik vrij veel power nodig heb. Na een tijd zoeken, en rondvragen kreeg ik de tip om eens op Unitedhobbies.com te kijken, omdat daar alles erg goedkoop is. Toen kwam eigenlijk direct het idee om een Brushless motor te gaan gebruiken.
Mijn oog viel direct op deze outrunner.
Model: HXT 42-63A
Speed : 600Kv
Max Efficiency : 38A
Max Load : 50A
Weight : 278grams
Thrust : 900~3000gr (12x8 Prop)
Voltage Range : 9~18
No Load Current : 6.3A
Power: 900W
Shaft: 5mm
ESC Required : 70A
In combinatie met deze speedo
High rate (10 KHz) switching (PWM)
3 to 6 Li-poly cells with receiver.
Dynamic braking ensures prompt prop folding.
BEC (2.0A) provides power to receiver and servos.
Over temperature protection.
User programmable Features.
Low-voltage protection - Programmable
Cutoff can be programmed for motor stop or reduced power.
Brake Type.
Throttle Range.
Timing Advance.
Safe “power on?arming program.
Low torque “soft start?prevents damage to fragile gearboxes.
Auto shut down in 4sec after signal is lost or radio interference becomes severe.
Microprocessor controlled.
Programmable rotation.
Ik heb direct voor de sturing van beide wielen 2 sterke servos gekocht met metal gears (10kg kerels)
Vrijdag zijn deze dingen allemaal binnen gekomen, en ik ben aangenaam verrast, alles ziet er goed uit.
Ik heb juist gekozen voor een laag aantal rpm/V omdat in mijn ogen, een hoog RPM alleen maar nadelig is. Want, je moet dan een dikke vertraging maken = meer ruimte minder effiecient. en er kan meer kapot gaan. En het is een outrunner geworden vanwege het hoge koppel. De aandrijving hier wordt voorzien van Tandriemen, met een vertraging van 1:2,64
Tot zover ben ik gekomen, ik ga dit topic updaten wanneer ik natuurlijk weer wat verder ben
Laatst bewerkt: