Wanneer deze net zo mooi vliegt als hij gebouwd wordt dan komt het wel goed!!
Is het Multiwii board al gebracht door de postbode??
Heeft Madmax al gevlogen??
Multiwii is voor de 2e keer (gratis) onderweg, nu met tracking nummer.
Ik verwacht komende week.
Cor, hoe staat het met jouw project?
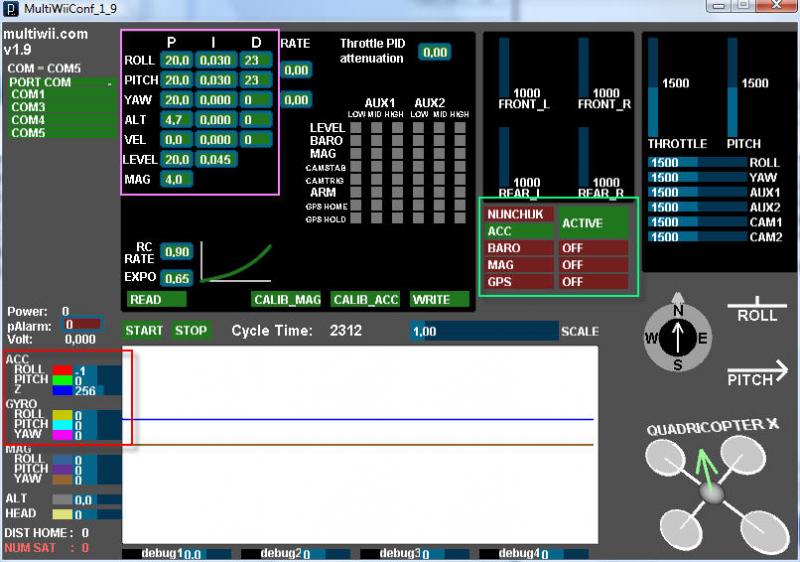
 Fligtboard doet het wel. Bij het heen en weer bewegen van de quad worden de motoren duidelijk aangestuurd.
Fligtboard doet het wel. Bij het heen en weer bewegen van de quad worden de motoren duidelijk aangestuurd.




")