Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
POC: intrekbare elektro aandrijving voor zwever
- Topicstarter TheNorb
- Startdatum
TheNorb
verslagschrijvers
snel!
Jeej, ga ik koffie drinken en kom ik terug is het goede antwoord alweer gegeven!
Maar eh, klopt Dirk
20 minuten is de maximale tijd die je beschikbaar hebt in de demo-versie van sketchUp?
Jeej, ga ik koffie drinken en kom ik terug is het goede antwoord alweer gegeven!
Maar eh, klopt Dirk
DirkSchipper
Forum veteraan
:schrik:  :shock:
:shock:  roost:
roost:  :rolling:
:rolling:
:shock: roost: :rolling: ...
Even getekend kwam er dus dit uit:

Ik wil niet mijn hele constructie veranderen, de wagen bijvoorbeeld loopt heel mooi licht en is spelingsvrij, die wordt dus herbruikt.
...
Dit is inderdaad een mooie variant geworden.
Als het scharnierpunt van de steunbuis die vastzit aan de romp een stuk lager en iets verder naar de neus wordt verplaatst, dan klapt het beter open en staat het steviger in de vertikale stand.
btw. mooi programma die Sketchpad, ik ga d'r ook even naar kijken. Dit lukt me niet in 20 minuten met bv. CorelDraw.
Groet, Sinan
TheNorb
verslagschrijvers
1200
Klopt Tevens heeft deze constructie als voordeel dat de luiken aan de achterkant zeer smal kunnen worden. Ik voeg nu een grotere spinner toe, zodat de bladen ook meer ruimte hebben om in te klappen. Straks komt de motor "achterstevoren" te zitten. Ik schroef dan een prop-adapter aan de achterkant van deze motor, zodat de prop zover mogelijk verwijderd is van de hoofdstang...
Tevens heeft deze constructie als voordeel dat de luiken aan de achterkant zeer smal kunnen worden. Ik voeg nu een grotere spinner toe, zodat de bladen ook meer ruimte hebben om in te klappen. Straks komt de motor "achterstevoren" te zitten. Ik schroef dan een prop-adapter aan de achterkant van deze motor, zodat de prop zover mogelijk verwijderd is van de hoofdstang...
Ook wordt de 'radiusstang' nu (ongeveer) in het midden van de hoofdstang geplaatst, zodat de motor dan ook (ongeveer) verticaal omhoog komt. Dat was bij versie 1 niet mogelijk (hij was "lelijk" krom gebogen).
...mij lukte dit ook niet zomaar :nooo:, ik had een voorbeeld gevonden (iets met een deksel open en dicht doen en dat aangepast.... ) en gedomload. Ja, ja, domloaden (en niet downloaden
) en gedomload. Ja, ja, domloaden (en niet downloaden  , omdat je dan niets leert). Maar ja, je hebt dan ook niet zoveel tijd om iets te leren; exact 1200 seconden.... Maar zoals Johan altijd zegt heeft dit nadeel natuurlijk ook weer een voordeel! Het voordeel is dan dat ik wel meer tijd had om aan de nieuwe motorsteun te werken
, omdat je dan niets leert). Maar ja, je hebt dan ook niet zoveel tijd om iets te leren; exact 1200 seconden.... Maar zoals Johan altijd zegt heeft dit nadeel natuurlijk ook weer een voordeel! Het voordeel is dan dat ik wel meer tijd had om aan de nieuwe motorsteun te werken
roost:
Dit is inderdaad een mooie variant geworden.
Als het scharnierpunt van de steunbuis die vastzit aan de romp een stuk lager en iets verder naar de neus wordt verplaatst, dan klapt het beter open en staat het steviger in de vertikale stand.
Klopt
Tevens heeft deze constructie als voordeel dat de luiken aan de achterkant zeer smal kunnen worden. Ik voeg nu een grotere spinner toe, zodat de bladen ook meer ruimte hebben om in te klappen. Straks komt de motor "achterstevoren" te zitten. Ik schroef dan een prop-adapter aan de achterkant van deze motor, zodat de prop zover mogelijk verwijderd is van de hoofdstang...Ook wordt de 'radiusstang' nu (ongeveer) in het midden van de hoofdstang geplaatst, zodat de motor dan ook (ongeveer) verticaal omhoog komt. Dat was bij versie 1 niet mogelijk (hij was "lelijk" krom gebogen).
btw. mooi programma die Sketchpad, ik ga d'r ook even naar kijken. Dit lukt me niet in 20 minuten met bv. CorelDraw....
...mij lukte dit ook niet zomaar :nooo:, ik had een voorbeeld gevonden (iets met een deksel open en dicht doen en dat aangepast....
) en gedomload. Ja, ja, domloaden (en niet downloaden , omdat je dan niets leert). Maar ja, je hebt dan ook niet zoveel tijd om iets te leren; exact 1200 seconden.... Maar zoals Johan altijd zegt heeft dit nadeel natuurlijk ook weer een voordeel! Het voordeel is dan dat ik wel meer tijd had om aan de nieuwe motorsteun te werken roost:TheNorb
verslagschrijvers
Begin, deel 1
Als je dan toch overnieuw moet beginnen, kun je het beter goed aanpakken.... Omdat die oranje servo het natuurlijk nét niet is, ga ik nu een lange M3-draadstang nemen, aangedreven door een net iets te dikke motor, die ik nog had liggen.
En je weet het: elk nadeel heeft zijn voordeel: nadeel is dat de motor iets te dik is (ach, dat maakt voor deze POC toch niets uit) en het voordeel is dat ik mijn 6V-power BEC schakeling kan herbruiken (die was ook 6V). Ik moet wel even kijken of dat goed lukt, want aansturing moet met behulp van Arduino gaan....
Als zo'n motortje draait op 6V met 'n M3-draadstang, dan hou je het moertje niet tegen :nooo:
Hier weer de nieuwe onderdelen voor de motorophanging:

Hier de nét iets te dikke motor en nog een paar onderdelen:

Hier het eerste begin met het verlijmen van de onderdelen:

Als je dan toch overnieuw moet beginnen, kun je het beter goed aanpakken.... Omdat die oranje servo het natuurlijk nét niet is, ga ik nu een lange M3-draadstang nemen, aangedreven door een net iets te dikke motor, die ik nog had liggen.
En je weet het: elk nadeel heeft zijn voordeel: nadeel is dat de motor iets te dik is (ach, dat maakt voor deze POC toch niets uit) en het voordeel is dat ik mijn 6V-power BEC schakeling kan herbruiken (die was ook 6V
). Ik moet wel even kijken of dat goed lukt, want aansturing moet met behulp van Arduino gaan....Als zo'n motortje draait op 6V met 'n M3-draadstang, dan hou je het moertje niet tegen :nooo:
Hier weer de nieuwe onderdelen voor de motorophanging:
Hier de nét iets te dikke motor en nog een paar onderdelen:
Hier het eerste begin met het verlijmen van de onderdelen:
Laatst bewerkt:
TheNorb
verslagschrijvers
idee?
Ja, is wel lekker opgeruimd en simpel (één servootje) maar dan mag je wel een hele beste servo hebben... Ik weet niet precies hoe veel de motor + prop straks exact gaat wegen, en hoe lang die hoofdstang straks wordt....
Stel: aandrijving 250 gram over een armlengte van 30cm, dan moet je wel een aardige servo hebben. En dan nog overdimensioneren, want tijdens een vlucht gaat alles moeilijker en zwaarder....
Is het geen idee om een stevige retract servo direct onder de hoofdstang te zetten zonder enige overbrenging? De radiusstang zorgt ervoor dat de servo heen en weer rijdt op z'n geleiders. Het lijkt me een lekker opgeruimde oplossing.
Ja, is wel lekker opgeruimd en simpel (één servootje) maar dan mag je wel een hele beste servo hebben... Ik weet niet precies hoe veel de motor + prop straks exact gaat wegen, en hoe lang die hoofdstang straks wordt....
Stel: aandrijving 250 gram over een armlengte van 30cm, dan moet je wel een aardige servo hebben. En dan nog overdimensioneren, want tijdens een vlucht gaat alles moeilijker en zwaarder....
DirkSchipper
Forum veteraan
250 gram en 30 cm ==> 7,5 kgcm
veiligheidsfactor 2 ==> 15 kgcm
Dat is toch niet zo'n idioot zware servo? Temeer omdat het waarschijnlijk een gewoon standaardformaat mag zijn ...
Dirk
veiligheidsfactor 2 ==> 15 kgcm
Dat is toch niet zo'n idioot zware servo? Temeer omdat het waarschijnlijk een gewoon standaardformaat mag zijn ...
Dirk
Ik zie nog een potentieel probleem met deze configuratie. In de "oude" opstelling trok de aandrijfmotor het geheel omhoog, en kon je door een geschikte mechanische stop in te bouwen de servo ontlasten. Nu trekt de motor het geheel naar beneden, en kan de servo niet meer ontlast worden tenzij je nog een apart grendelmechanisme inbouwt.
Max.
Max.
TheNorb
verslagschrijvers
250 gram en 30 cm ==> 7,5 kgcm
veiligheidsfactor 2 ==> 15 kgcm Dat is toch niet zo'n idioot zware servo? Temeer omdat het waarschijnlijk een gewoon standaardformaat mag zijn ... Dirk
Ik had/heb zo'n servo van 12,5 kg/cm maar had nu niet de indruk dat dit echt van harte ging. Misschien iets te maken met het feit dat die gondel ook wel een lange weg moet maken? Mijn huidige "arm" is nog langer, en ik dacht laten we het eens anders doen
 ....
....Zo'n motor met schroef-as levert wel veeeel meer vermogen af. En in welke stand dan ook kun je hem niet wegtrekken. In de vorige setup trok de motor (zonder blokkering) dan aan de servo, die fenomeen speelt hier geen rol :nooo:
TheNorb
verslagschrijvers
klopt!
Klopt! Nog een reden om een draadstang aandrijving (hoe heet dat eigenlijk?) te gebruiken...
Nog wel "even" een motorbesturing maken :nosmile:...
Ik zie nog een potentieel probleem met deze configuratie. In de "oude" opstelling trok de aandrijfmotor het geheel omhoog, en kon je door een geschikte mechanische stop in te bouwen de servo ontlasten. Nu trekt de motor het geheel naar beneden, en kan de servo niet meer ontlast worden tenzij je nog een apart grendelmechanisme inbouwt. Max.
Klopt! Nog een reden om een draadstang aandrijving (hoe heet dat eigenlijk?) te gebruiken...
Nog wel "even" een motorbesturing maken :nosmile:...
SpindelKlopt! Nog een reden om een draadstang aandrijving (hoe heet dat eigenlijk?) te gebruiken...
TheNorb
verslagschrijvers
bezig
Gisteravond bezig geweest....
en hier nog een keer de nieuwe onderdelen. Het houdt je wel van de straat in ieder geval...

Hier in de opstelling:

Het voordeel dat de net iets te dikke motor wel beter ligt ten opzichte van het zwaartepunt. Het geheel kan in elkaar geschoven worden (dus motordeel onder de slede). Voor het POC-effect heb ik het even zo gedaan... Ik weet niet of de radiusstang fors genoeg is, maar deze kant eenvoudig vervangen worden door bijv een strip aluminium.

Je kunt natuurlijk wel iets bouwen, maar het moet wel ongeveer passen... Gaat het passen :shock: ? Ja dat gaat!

Past makkelijk! Bovendien is nu de POC rechttoe rechtaan gebouwd, zonder teveel na te denken Het geheel kan in ieder geval veel compacter (korter / smaller)
Het geheel kan in ieder geval veel compacter (korter / smaller)

Gisteravond bezig geweest....
en hier nog een keer de nieuwe onderdelen. Het houdt je wel van de straat in ieder geval...
Hier in de opstelling:
Het voordeel dat de net iets te dikke motor wel beter ligt ten opzichte van het zwaartepunt. Het geheel kan in elkaar geschoven worden (dus motordeel onder de slede). Voor het POC-effect heb ik het even zo gedaan... Ik weet niet of de radiusstang fors genoeg is, maar deze kant eenvoudig vervangen worden door bijv een strip aluminium.
Je kunt natuurlijk wel iets bouwen, maar het moet wel ongeveer passen... Gaat het passen :shock: ? Ja dat gaat
!
Past makkelijk! Bovendien is nu de POC rechttoe rechtaan gebouwd, zonder teveel na te denken
Het geheel kan in ieder geval veel compacter (korter / smaller)

TheNorb
verslagschrijvers
TheNorb
verslagschrijvers
Ouderwets (geen arduino
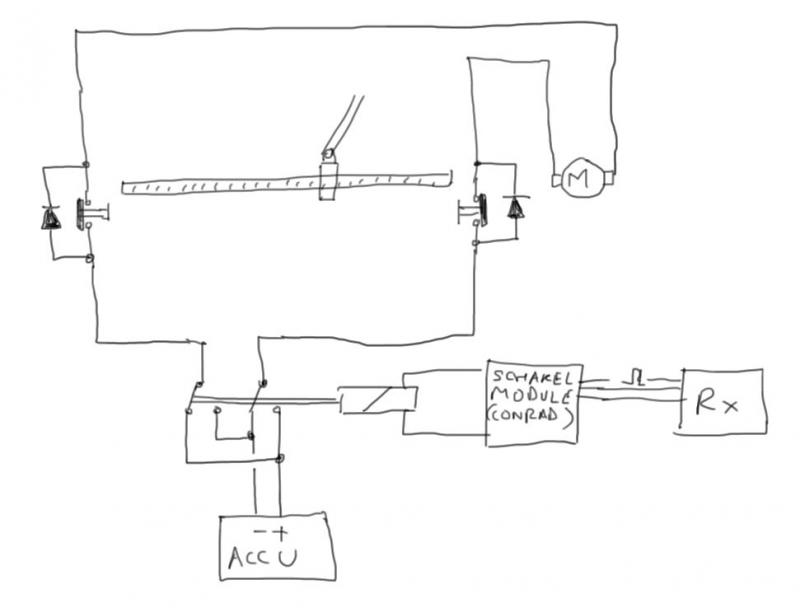
Zie ik daar een Conrad's "Schakel Modul"? Ja, die ga ik dus ook zelf maken. Wel mooi dat er meegedacht wordt!
Het zal een H-brug worden, met pulse-ingang, zodat ik de snelheid ook nog kan regelen.....
De onderdelen komen vandaag binnen (de postbode is al onderweg, zag ik zojuist al staan) Trouwens allemaal van meneer Conrad...Nu nog maar hopen dat het gaat werken.....
TheNorb
verslagschrijvers
doorgeschoten
Ja dat is te makkelijk.... Ik wil het een beetje zelf doen....
De net iets te dikke motor trekt (indien kortgesloten) iets minder dan 6A. Ik ben van plan om in eerste instantie met eindschakelaars en timers, de motor te bewaken. Om nu al een stroommeter in te bouwen gaat te ver.
...en bedankt :Fade-color
Ik bedoelde eigenlijk zo iets met 'retract servo'. En dan het landigspootje vervangen door de hoofdstang met motor er op.
Ja dat is te makkelijk
.... Ik wil het een beetje zelf doen....De elektronica tegen het vastlopen etc. is ook al deels ingebouwd.
De net iets te dikke motor trekt (indien kortgesloten) iets minder dan 6A. Ik ben van plan om in eerste instantie met eindschakelaars en timers, de motor te bewaken. Om nu al een stroommeter in te bouwen gaat te ver.
btw. de prototypes die je elke keer neerzet zijn echte kunstwerkjes! Groet, Sinan
...en bedankt :Fade-color
TheNorb
verslagschrijvers
Perfekt!
Het "Point Of No Return" is bereikt en ik moet door. Ik kan niet meer stoppen (hè Piet") ) Dat is maar goed ook, want gisteravond even een paar testjes gedaan.
) Dat is maar goed ook, want gisteravond even een paar testjes gedaan.
Nee :nooo:, ik hoefde geen voetbal te kijken. Vind ik normaal gesproken wel leuk, maar ja, hobby gaat voor.Om 22:00 was ik blij! Dat komt niet door roost: of :celebrate: of doordat het nog steeds 0-0 was, maar door de net-iets-te-dikke motor en zijn spindel. Dat loopt mooi, heel mooi!!!
Nog een groot voordeel van deze NITD-motor en de spindel is het "Homen". Daarmee bedoel ik als je het systeem onder spanning zet (aanzet) en wat er dan allemaal gebeurd. Een servo heeft normaal gesproken geen terugkoppeling in welke stand hij staat. Je kunt alleen maar tegen de servo zeggen: "ga naar positie 140" ofzoiets.
Nu heeft de NITD-motor & spindel ook geen terugkoppeling, maar dat hoeft ook niet. Als het systeem wordt aangezet, en de hoofdarm ligt niet in de onderste positie, dan kan ik de motor langzaam naar onderen sturen (wel eerst dan de luiken open doen......). Als je dat tegen een servo zou zeggen, dan gaat deze full-speed naar beneden, en misschien kan dat wel helemaal niet.... En meestal is dat ook ongewenst gedrag.
Maar goed: vanavond maar weer eens even bezig met de aansturing hiervan en kijken wat het wordt...
Het "Point Of No Return" is bereikt en ik moet door. Ik kan niet meer stoppen (hè Piet
) Dat is maar goed ook, want gisteravond even een paar testjes gedaan.Nee :nooo:, ik hoefde geen voetbal te kijken. Vind ik normaal gesproken wel leuk, maar ja, hobby gaat voor
.Om 22:00 was ik blij! Dat komt niet door roost: of :celebrate: of doordat het nog steeds 0-0 was, maar door de net-iets-te-dikke motor en zijn spindel. Dat loopt mooi, heel mooi!!!Nog een groot voordeel van deze NITD-motor en de spindel is het "Homen". Daarmee bedoel ik als je het systeem onder spanning zet (aanzet) en wat er dan allemaal gebeurd. Een servo heeft normaal gesproken geen terugkoppeling in welke stand hij staat. Je kunt alleen maar tegen de servo zeggen: "ga naar positie 140" ofzoiets.
Nu heeft de NITD-motor & spindel ook geen terugkoppeling, maar dat hoeft ook niet. Als het systeem wordt aangezet, en de hoofdarm ligt niet in de onderste positie, dan kan ik de motor langzaam naar onderen sturen (wel eerst dan de luiken open doen......). Als je dat tegen een servo zou zeggen, dan gaat deze full-speed naar beneden, en misschien kan dat wel helemaal niet.... En meestal is dat ook ongewenst gedrag.
Maar goed: vanavond maar weer eens even bezig met de aansturing hiervan en kijken wat het wordt...