6 Pos switch + namen Turnigy 9X(R) + Open TX
Er waren diverse tutorials op het web om voor de APM in combinatie met de ID0/ID1/ID2 & AIL Switches de 6 standen voor elkaar te krijgen. Een 2e tutorial verklaarde hoe je deze kan benamen en ook zichtbaar krijgen in je display (helaas max 5). Helaas waren die erg verwarrend en eigenlijk zaten hier dingen in die niet eens nodig zijn
")
. Ik heb dus even een simpelere versie in mekaar geprut. Het handigste als je een 9X(R) hebt is om hem aan je PC aan te sluiten dmv Companion9X.
Let wel zoals de 6POS switch is voor elke zender toepasbaar alleen zullen de settings iets anders zijn en ook de waardes kunnen verschillen. Het gebruik van de namen met custom switches is volgens mij echt voorbehouden aan de OpenTX firmware.
Je moet diverse stappen doorlopen hier mijn gebruikte settings. Ik heb dus hiermee 2X 3 Standen en zo kan ik mijn 6 vluchtmodus opties kiezen in APM. Verder heb ik bijvoorbeeld RTL en FLIP op 2 andere schakelaars gezet hier heb je wel een 8 kanaals ontvanger voor nodig. Als je alleen de vluvht mode wil kunnen kiezen heb je minimaal 5 kanalen nodig. In mijn geval gebruik ik CPPM waarbij er dus 1 kabel (3 draads) van de APM naar de ontvanger gaat.
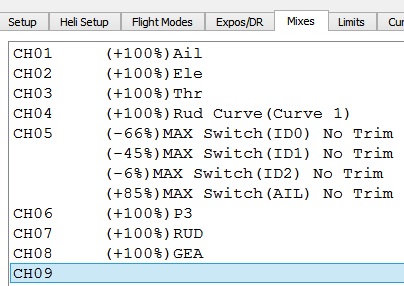
De eerste stap is het configureren van je switches op CH5 gebruik hier de volgende settings voor (controleer dit in Mission planner bij Flight modes)
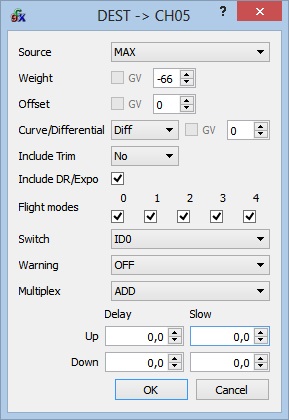
Nu zal je denken ik zie maar 4 settings ... correct maar zorg ervoor dat je bij het aanmaken van je settings de optie ADD kiest zo krijg je namelijk een optelling. Doe dit bij elke setting als volgt voor elke switch:
Je kan nu al testen in MP of het werkt mogelijk moet je iets tunen met de getallen.
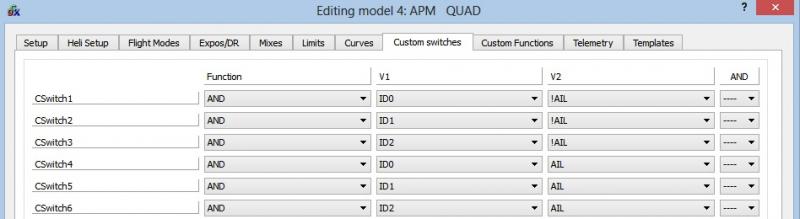
De volgende stap is dus OpenTX only en gaat over het geven van namen aan de Flight modes die dan ook netjes je schakelaars volgen.
We gaan nu eerst custom switches aanmaken doe dit als volgt:
De volgende stap is deze custom switches toekennen aan de Flight modes en ze een naam te geven. Zoals gezegd er zijn maximaal 1+4 flight modes (helaas) hier zoals ik het ingesteld heb:
FM0:
FM1:
FM2:
FM3:
FM4:
Dit is eigenlijk alles en zo heb je dus ook de namen van je gekozen vlucht mode in je display.
Voor alle zekerheid nog even 1 ding toegevoegd namelijk het opzetten van de THR-CUT zo kan je je zender dus dmv 1 schakelaar je throttle uitzetten (hold)
Het meeste zal dus op andere zenders ook werken maar je zal mogelijk de waarden anders moeten instellen. Kijk naar het resultaat in MP dit helpt je een hoop.
Als er nog vragen zijn dan hoor ik die graag.
Grt,
Jerome

")