Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Paramotor trike (met camera gimbal en auto pilot)
- Topicstarter stef stuntpiloot
- Startdatum
stef stuntpiloot
Forum veteraan
Sja kan niet anders, de propeller is 18x10.
Het scherm is overigens 5.2m2 (525cm span)
Het scherm is overigens 5.2m2 (525cm span)
stef stuntpiloot
Forum veteraan
Naast het ontwerpen en bouwen vind ik het ook leuk om mijn ervaringen te delen
Via een bouwverslag of video's. Ik ben net klaar met de eerste video over dit
project en ben van plan er meer van te maken. Ik hoop dat jullie het leuk vinden!
Als er vragen zijn of je iets in meer detail zou willen zien, laat het dan even weten!
Via een bouwverslag of video's. Ik ben net klaar met de eerste video over dit
project en ben van plan er meer van te maken. Ik hoop dat jullie het leuk vinden!
Als er vragen zijn of je iets in meer detail zou willen zien, laat het dan even weten!

 Vinden we helemaal niet leuk....
Vinden we helemaal niet leuk....
stef stuntpiloot
Forum veteraan
Hehe, nou mijn excuses voor het vragen! 
Ik ga nog even een video maken dan van het 3D printen voordat ik verder ga met de bouw, als ik de prints ga lamineren kan ik uiteraard minder goed wat vertellen over de prints die onder het glasvezel zitten.
Ik ga nog even een video maken dan van het 3D printen voordat ik verder ga met de bouw, als ik de prints ga lamineren kan ik uiteraard minder goed wat vertellen over de prints die onder het glasvezel zitten.
stef stuntpiloot
Forum veteraan
Ik heb wat gedoe gehad met het printen, daar maak ik ook een video van maar ik heb er natuurlijk ook voldoende zo over te vertellen.
Ik heb bij aanvang de benodigde printtijd verkeerd ingeschat, is opzich niet erg maar het duurde in totaal best lang. De reden daarvoor ligt vooral bij de printer die
ik gebruikt heb, ik moest mij inhouden met de snelheid waarmee ik printe omdat anders de kwaliteit van de geprinte objecten erg snel minder werd. (huidige printertje
is gemaakt van relatief dun gezet plaatstaal dat aan elkaar geschroeft is met M4 boutjes)
Wanhao i3:

De eerste twee prints kwamen prima van de machine af, niet geweldig maar meer dan voldoende voor wat ik er mee wou doen. Maar daarna ging het heel erg snel
achteruit en had ik geen andere keuze dan de boel af te kappen en eerst te zoeken naar de oorzaak van de matige printkwaliteit. Ik heb een foto (macro) gemaakt
van het oppervlak van de print:
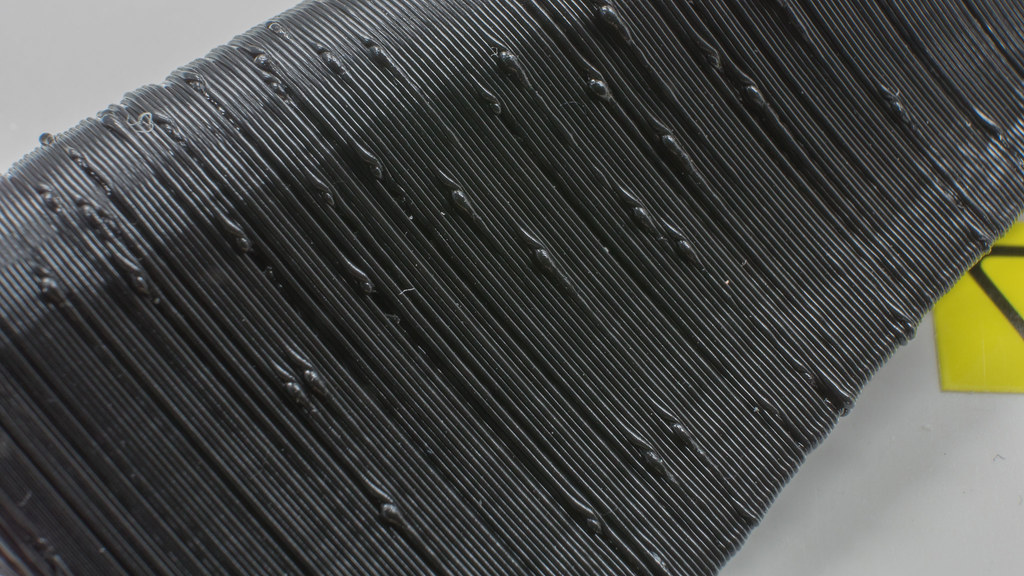
Houd er rekening mee, het lijkt heel dramatisch maar de laaghoogte is slechts 0.3mm in deze foto
De belangrijkste dingen die hier aan opvallen zijn:
1 - Regelmatig bij het starten van het extruderen bij de buitenste laag duurt het 10 tot 20mm voordat er daadwerkelijk plastic uit de nozzle komt. Als
er wel plastic uit komt dan is er een dermate grote overlap dat het aan de zijkant uitstulpt.
2 - De lagen liggen niet mooi op elkaar, als je de zijkant ziet (rechtsonder) dan is dat niet een rechte lijn.
3 - Wat hier niet te zien is maar wel tijdens het printen te zien was, de randen van de print krullen wat omhoog als er sprake is van een overhang.
Hiervoor heb ik de volgende dingen aangepast:
1 - Dit heeft te maken met de ooze-control van de printer. Bij het starten en stoppen van een extrusielijn trekt hij het filament een stukje terug zodat hij
niet drupt. Als test heb ik de maximale retraction terug gezet, de extra restart extrusie wat verminderd en de coasting (de afstand aan het einde van
een extrusie stuk dat hij niet meer plastic extrudeerd) iets hoger gezet, van 0.05 naar 0.1mm. Daarnaast heb ik een aantal extra opties geactiveerd
die ik in het verleden aan heb gehad maar om onduidelijke reden uitgeschakeld waren. Dat zijn:
- Only retract when crossing open spaces
- Force retraction between layers
- Retraction during wipe move
- Only wipe at outer perimeter
- Avoid crossing outline for travel moves (max 3mm omweg)
2 - Dit heeft in verreweg de meeste gevallen te maken met de temperatuur die te hoog is. Ik printe op een relatief hoge temperatuur voor PLA (215 graden)
dit deed ik hoofdzakelijk omdat de extruder niet sterk genoeg is om op lagere temperatuur (wanneer het kunststof een hogere viscositeit heeft) een acceptabele
printsnelheid te houden. Toch om te kijken of dit een oplossing biedt heb ik de temperatuur verlaagd naar 205 graden tijdens het printen.
3 - Dit heeft dezelfde oorzaak als 2, met als toevoeging dat het ook een stuk beter wordt als er actieve koeling plaats vind van de print.
Na deze veranderingen werd de printkwaliteit een heel stuk beter, maar ik had nog steeds last van onregelmatigheden omdat de extruder slipte (niet genoeg druk
op het filament tijdens het printen in combinatie met een aandrijfwiel dat niet precies gecentreerd is op de as). Uit frustratie heb ik toen de hele extruder
en hotend combinatie van de printer "getrokken" en er een E3D V6 hotend met een titan extruder op gezet, die combi had ik toch in de lade liggen.
Met nog wat finetuning heeft het wel effect gehad, de print is een stuk beter geworden!
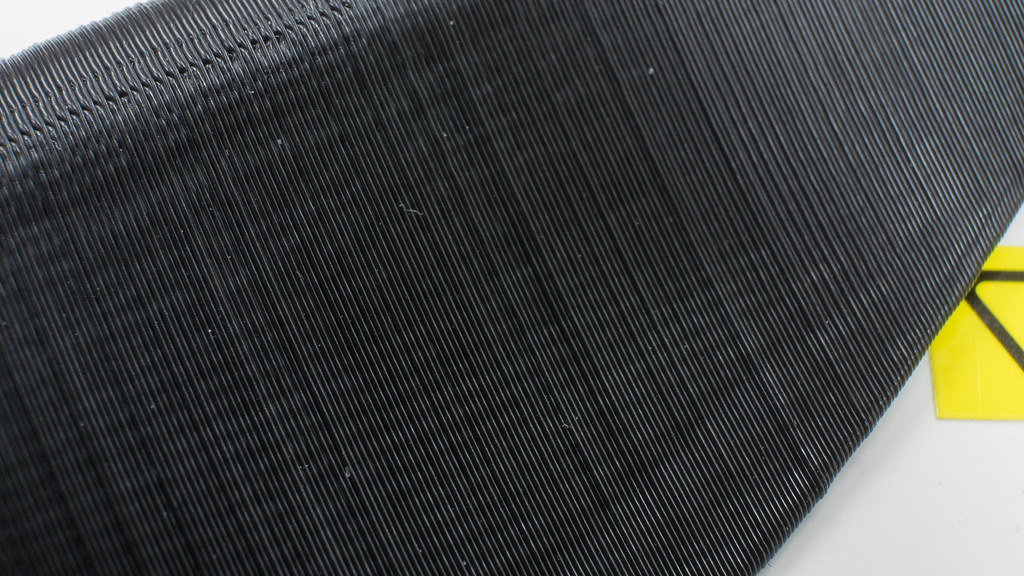
Hier is het ook erg uitvergroot, maar houd er rekening mee dat elke laag slechts 0.25mm is
Ik heb bij aanvang de benodigde printtijd verkeerd ingeschat, is opzich niet erg maar het duurde in totaal best lang. De reden daarvoor ligt vooral bij de printer die
ik gebruikt heb, ik moest mij inhouden met de snelheid waarmee ik printe omdat anders de kwaliteit van de geprinte objecten erg snel minder werd. (huidige printertje
is gemaakt van relatief dun gezet plaatstaal dat aan elkaar geschroeft is met M4 boutjes)
Wanhao i3:
De eerste twee prints kwamen prima van de machine af, niet geweldig maar meer dan voldoende voor wat ik er mee wou doen. Maar daarna ging het heel erg snel
achteruit en had ik geen andere keuze dan de boel af te kappen en eerst te zoeken naar de oorzaak van de matige printkwaliteit. Ik heb een foto (macro) gemaakt
van het oppervlak van de print:
Houd er rekening mee, het lijkt heel dramatisch maar de laaghoogte is slechts 0.3mm in deze foto
De belangrijkste dingen die hier aan opvallen zijn:
1 - Regelmatig bij het starten van het extruderen bij de buitenste laag duurt het 10 tot 20mm voordat er daadwerkelijk plastic uit de nozzle komt. Als
er wel plastic uit komt dan is er een dermate grote overlap dat het aan de zijkant uitstulpt.
2 - De lagen liggen niet mooi op elkaar, als je de zijkant ziet (rechtsonder) dan is dat niet een rechte lijn.
3 - Wat hier niet te zien is maar wel tijdens het printen te zien was, de randen van de print krullen wat omhoog als er sprake is van een overhang.
Hiervoor heb ik de volgende dingen aangepast:
1 - Dit heeft te maken met de ooze-control van de printer. Bij het starten en stoppen van een extrusielijn trekt hij het filament een stukje terug zodat hij
niet drupt. Als test heb ik de maximale retraction terug gezet, de extra restart extrusie wat verminderd en de coasting (de afstand aan het einde van
een extrusie stuk dat hij niet meer plastic extrudeerd) iets hoger gezet, van 0.05 naar 0.1mm. Daarnaast heb ik een aantal extra opties geactiveerd
die ik in het verleden aan heb gehad maar om onduidelijke reden uitgeschakeld waren. Dat zijn:
- Only retract when crossing open spaces
- Force retraction between layers
- Retraction during wipe move
- Only wipe at outer perimeter
- Avoid crossing outline for travel moves (max 3mm omweg)
2 - Dit heeft in verreweg de meeste gevallen te maken met de temperatuur die te hoog is. Ik printe op een relatief hoge temperatuur voor PLA (215 graden)
dit deed ik hoofdzakelijk omdat de extruder niet sterk genoeg is om op lagere temperatuur (wanneer het kunststof een hogere viscositeit heeft) een acceptabele
printsnelheid te houden. Toch om te kijken of dit een oplossing biedt heb ik de temperatuur verlaagd naar 205 graden tijdens het printen.
3 - Dit heeft dezelfde oorzaak als 2, met als toevoeging dat het ook een stuk beter wordt als er actieve koeling plaats vind van de print.
Na deze veranderingen werd de printkwaliteit een heel stuk beter, maar ik had nog steeds last van onregelmatigheden omdat de extruder slipte (niet genoeg druk
op het filament tijdens het printen in combinatie met een aandrijfwiel dat niet precies gecentreerd is op de as). Uit frustratie heb ik toen de hele extruder
en hotend combinatie van de printer "getrokken" en er een E3D V6 hotend met een titan extruder op gezet, die combi had ik toch in de lade liggen.
Met nog wat finetuning heeft het wel effect gehad, de print is een stuk beter geworden!
Hier is het ook erg uitvergroot, maar houd er rekening mee dat elke laag slechts 0.25mm is
Hoi,
Omdat ik zelf ook met een project gestart ben met een trike schaal 1:4 zou ik graag willen weten wat de verschillen zijn tussen de Oxy 5.0 en de Hybrid 5.2 zoals in bovenstaand verslag genoemd.
Binnenkort ga ik een bouwverslag starten van mijn trike waar ik nu druk mee ben om alles uit te zoeken. Ik plaats alvast een foto van de zelf gelaste propellerbescherming.
Groetjes, Erik.

Omdat ik zelf ook met een project gestart ben met een trike schaal 1:4 zou ik graag willen weten wat de verschillen zijn tussen de Oxy 5.0 en de Hybrid 5.2 zoals in bovenstaand verslag genoemd.
Binnenkort ga ik een bouwverslag starten van mijn trike waar ik nu druk mee ben om alles uit te zoeken. Ik plaats alvast een foto van de zelf gelaste propellerbescherming.
Groetjes, Erik.
stef stuntpiloot
Forum veteraan
Het primaire verschil is dat de hybrid gedeeltelijk cellen heeft en gedeeltelijk alleen topdoek heeft. De oxy heeft alleen top doek. Daarnaast is er het verschil in formaat, windbereik en vlieggedrag met meer wind. Op de website van opale staat ook wel het een en ander en in de video's op youtube zie je ook verschil.
Single skin vliegt langzamer dan hybride, die op zijn beurt weer langzamer vliegt dan een double skin.
Een single skin is erg makkelijk op te zetten en vliegt super stabiel.
Door de bouwwijze is het niet mogelijk om speedbar te gebruiken bij een single skin.
Met een hybride kan dat wel enigszins.
Met een double skin gaat dat zeer goed.
Speedbar gebruik je om de instelhoek van je scherm te veranderen (lees kleiner) waardoor ie sneller vliegt.
Niet dat die snelheidstoename nou zo geweldig is, met een double skin is dit max 5 á 6 km/h.
Te veel speedbar veroorzaakt frontale inklappers.
De maximale hoeveelheid speedbar is afhankelijk van type scherm, wing load en turbulentie in de lucht.
Een hybride combineert een klein deel van de eigenschappen van een double skin met een groot deel van de single skin.
Een single skin is erg makkelijk op te zetten en vliegt super stabiel.
Door de bouwwijze is het niet mogelijk om speedbar te gebruiken bij een single skin.
Met een hybride kan dat wel enigszins.
Met een double skin gaat dat zeer goed.
Speedbar gebruik je om de instelhoek van je scherm te veranderen (lees kleiner) waardoor ie sneller vliegt.
Niet dat die snelheidstoename nou zo geweldig is, met een double skin is dit max 5 á 6 km/h.
Te veel speedbar veroorzaakt frontale inklappers.
De maximale hoeveelheid speedbar is afhankelijk van type scherm, wing load en turbulentie in de lucht.
Een hybride combineert een klein deel van de eigenschappen van een double skin met een groot deel van de single skin.
Hoi,
Uiteraard heb ik alles van Opale gelezen en gezien maar de vraag is eigenlijk meer naar gebruikers. Ik hoop dat er lezers zijn die daadwerkelijk één van deze twee schermen gebruiken en mij voor-en nadelen kunnen zeggen. Ik wil onder het scherm een 1;4 schaal trike hangen met FPV. Voornamelijk te gebruiken aan de kust in Zeeuws Vlaanderen, dus uiteraard niet alleen met windstil weer. Ik heb daar met Bullix en scherm Stunt al heel vaak gevlogen en dat gaat fantastisch. Het scherm moet meer wind kunnen verdragen als de Stunt. En ivm de FPV gemoedelijk te starten en vliegen. Ik hoef niet te stunten. De trike zal rond de 3,5 kilo gaan wegen en gevlogen worden met 6 cellen. Motor, regelaar, propellers en cellen voor de trike heb ik al. Verder is een speedbar wenselijk maar niet noodzakelijk. Overigens wil ik er dan meteen een piloot, Lucas met rugzakmotor (backpack) bijkopen zodat ik hem overal kan gebruiken. Een trike kan niet overal rijdend starten.
Groetjes, Erik.
Uiteraard heb ik alles van Opale gelezen en gezien maar de vraag is eigenlijk meer naar gebruikers. Ik hoop dat er lezers zijn die daadwerkelijk één van deze twee schermen gebruiken en mij voor-en nadelen kunnen zeggen. Ik wil onder het scherm een 1;4 schaal trike hangen met FPV. Voornamelijk te gebruiken aan de kust in Zeeuws Vlaanderen, dus uiteraard niet alleen met windstil weer. Ik heb daar met Bullix en scherm Stunt al heel vaak gevlogen en dat gaat fantastisch. Het scherm moet meer wind kunnen verdragen als de Stunt. En ivm de FPV gemoedelijk te starten en vliegen. Ik hoef niet te stunten. De trike zal rond de 3,5 kilo gaan wegen en gevlogen worden met 6 cellen. Motor, regelaar, propellers en cellen voor de trike heb ik al. Verder is een speedbar wenselijk maar niet noodzakelijk. Overigens wil ik er dan meteen een piloot, Lucas met rugzakmotor (backpack) bijkopen zodat ik hem overal kan gebruiken. Een trike kan niet overal rijdend starten.
Groetjes, Erik.
Hoi,
Zo te zien hebben Piet (RC-PPG) en ik tegelijk zitten schrijven. Ik begrijp van hem dat ik in mijn geval het beste de Oxy 5.0 zou kunnen kiezen en dan afzien van een speedbar. Maar als anderen nog meer informatie hebben, lees ik het graag. Piet in ieder geval bedankt.
Groetjes, Erik.
Zo te zien hebben Piet (RC-PPG) en ik tegelijk zitten schrijven. Ik begrijp van hem dat ik in mijn geval het beste de Oxy 5.0 zou kunnen kiezen en dan afzien van een speedbar. Maar als anderen nog meer informatie hebben, lees ik het graag. Piet in ieder geval bedankt.
Groetjes, Erik.
Hoi Erik,
Zoals je zelf al zegt vlieg je vaak aan de kust, dus vaker met wat meer wind.
Dan ben je met een hybride beter af want dan heb je meer vliegsnelheid.
Een parawing heeft een bepaalde design snelheid, die niet groter wordt door meer gas te geven, deze gegeven snelheid is min of meer vast in het ontwerp vast gelegd.
Alleen extra gewicht kan je snelheid vergroten.
Zowel de Oxy 5.0 als de Hybrid 5.2 vliegen het mooist zo tussen de 8 en 11 kg.
Ga je lager zitten wat betreft gewicht, dan vlieg je nauwelijks meer dan stapvoets.
Voor beide wings is Pilot Tom de beste keus.
Als je aan Pilot Lucas denkt zul je een kleinere wing moeten kiezen
Bijvoorbeeld de Hybrid 3.0.
Een ander zeer goed alternatief voor Pilot Lucas is de nieuwe CrossAlps van Airc2fly.
De design snelheid van dit scherm ligt een stukje hoger dan alle andere hybride modellen.
Desondanks een zeer makkelijke starter en goed bestand tegen enige turbulentie.
Zoals je zelf al zegt vlieg je vaak aan de kust, dus vaker met wat meer wind.
Dan ben je met een hybride beter af want dan heb je meer vliegsnelheid.
Een parawing heeft een bepaalde design snelheid, die niet groter wordt door meer gas te geven, deze gegeven snelheid is min of meer vast in het ontwerp vast gelegd.
Alleen extra gewicht kan je snelheid vergroten.
Zowel de Oxy 5.0 als de Hybrid 5.2 vliegen het mooist zo tussen de 8 en 11 kg.
Ga je lager zitten wat betreft gewicht, dan vlieg je nauwelijks meer dan stapvoets.
Voor beide wings is Pilot Tom de beste keus.
Als je aan Pilot Lucas denkt zul je een kleinere wing moeten kiezen
Bijvoorbeeld de Hybrid 3.0.
Een ander zeer goed alternatief voor Pilot Lucas is de nieuwe CrossAlps van Airc2fly.
De design snelheid van dit scherm ligt een stukje hoger dan alle andere hybride modellen.
Desondanks een zeer makkelijke starter en goed bestand tegen enige turbulentie.
stef stuntpiloot
Forum veteraan
Bedankt voor de aanvulling!
Hoi,
Zo wordt het wel moeilijk om te gaan kiezen. Maar ik denk dat ik blijf bij Lucas als piloot (schaal 1:4) en dan de Hybrid 3.0. deze heeft mijn inziens voldoende draagvermogen om ook de trike met 6 cellen omhoog te krijgen.
Piet weer bedankt al wordt de keuze niet makkelijker.
Groetjes, Erik.
Zo wordt het wel moeilijk om te gaan kiezen. Maar ik denk dat ik blijf bij Lucas als piloot (schaal 1:4) en dan de Hybrid 3.0. deze heeft mijn inziens voldoende draagvermogen om ook de trike met 6 cellen omhoog te krijgen.
Piet weer bedankt al wordt de keuze niet makkelijker.
Groetjes, Erik.
stef stuntpiloot
Forum veteraan
Als aanvulling nog over die verschillen, hier nogmaals een foto die ik gemaakt heb van het hybridescherm:

Ik heb het scherm intussen al twee jaar maar ik heb nu eindelijk tijd vrij gemaakt om het apparaat af te bouwen!
Het idee: Een RC paramotor maken die kan functioneren als een alternatief op multicopters of vliegtuigen voor duurvluchten. Het toestel moet dus zelfstandig kunnen werken en een camera mee kunnen nemen.
De voordelen van een paramotor ten opzichte van een multicopter of vliegtuig:
- Voordelig voor zijn formaat (vleugeloppervlak)
- Efficient (kost weinig energie om te laten vliegen vergeleken met een multicopter)
- Heel compact te transporteren
- Erg lange vluchttijden mogelijk
- Erg stil (zeker met de gekozen propeller)
Dus het scherm dat ik ga gebruiken, Opale FOX RS 2.6:



Dit scherm is 4 meter breed en kan beladen worden met maximaal 7 kg
Ik heb een jaar ofzo geleden een concept gemaakt van de aandrijving die er onder komt te hangen, dit gaat wel behoorlijk veranderen maar voor het idee:
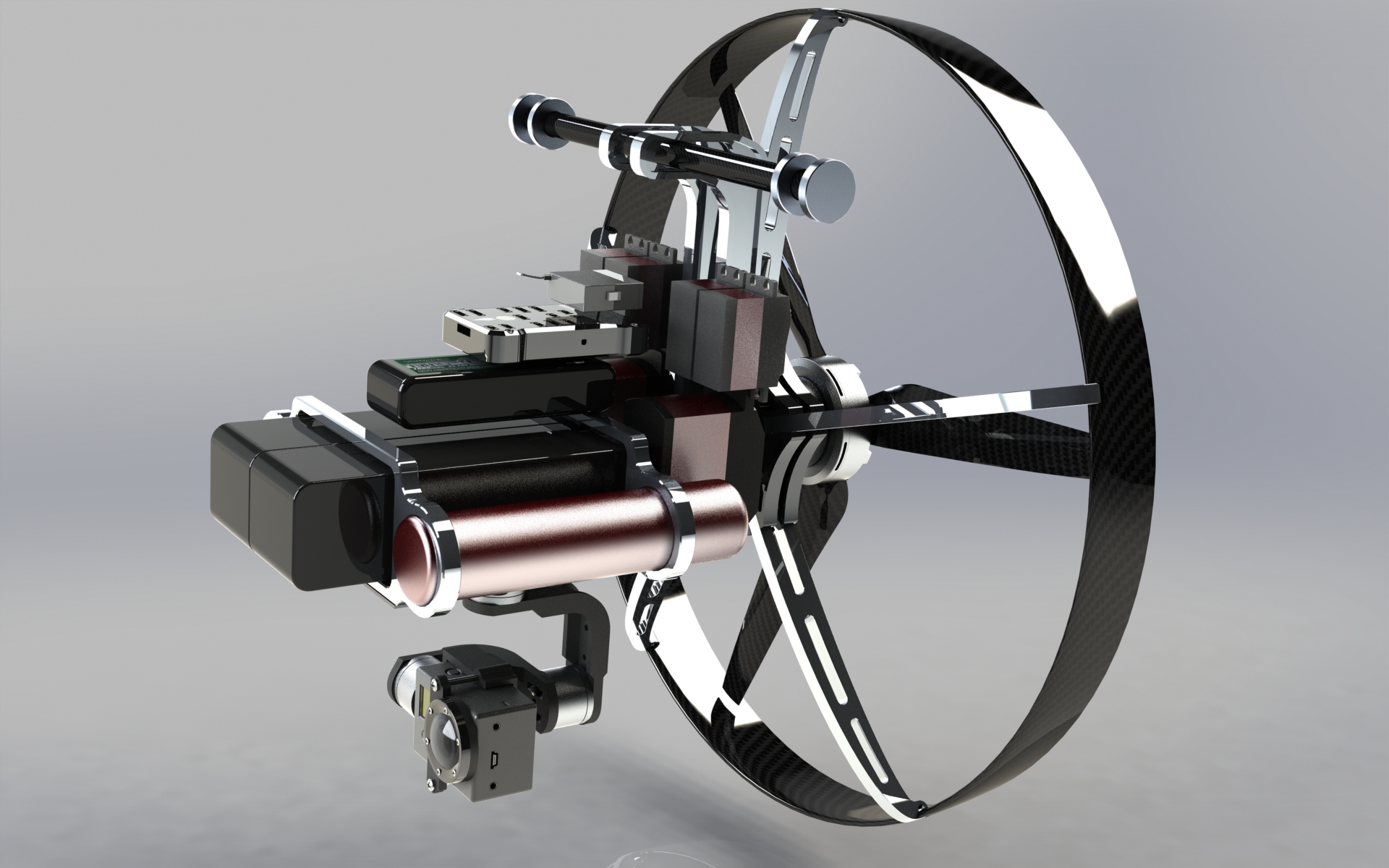
Een paar dingen die ik er aan ga veranderen zijn:
- Hangpunt aan het scherm wordt instelbaar en met twee servo's bedienbaar (voor gewicht verplaatsing sturen)
- Gimbal wordt intrekbaar om hem tijdens landingen te beschermen
- Flightcontroller wordt een pixhawk mini
- Ik wil de "airbag" landings bescherming vervangen voor een trike landingsgestel
- Ik neem geen 3blads prop maar een twee blads propeller, de kooi wordt aerodynamisch om zo torque steering tegen te gaan
Ik heb gisteren een boel onderdelen besteld, wat er voor nu in gaat komen:
1x - Pixhawk mini controller (met current sensor, airspeed sensor en GPS)
1x - Plush 100A ESC
1x - YEP 20A BEC
1x - Aerodrive 5065 320Kv motor
1x - Xoar 18x10 propeller
2x - 6S 10.000 mAh accu
2x - TS700MG servo (weightshift steer)
2x - HK15138 servo (brake lines)
2x - 9gram servo (speedbar)
2x - 9gram servo (big ears)
Gimbal ben ik nog niet over uit. Het inklap systeem voor de gimbal en landingsgestel moet ik ook nog uitwerken. Eerst maak ik een concept versie met wel de electronica er in van de uiteindelijke versie. de complexe dingen rondom de gimbal komen als hij lekker vliegt. De flightcontroller is ook nog wel wat uitdaging aangezien een paramotor heel anders aangestuurd moet worden dan een vliegtuig, heli of multicopter.
Lijkt het jullie leuk als ik hier een uitgebreid bouwverslag van maak?
Hoi,
Ik heb vandaag uitgebreid over jouw (Stef Stuntpiloot) ontwerp gesproken. Een vriend van mij opperde toe om het ontwerp van de kooi die jij gemaakt ook voor mij te maken. Hij is in het bezit van een professionele 3D printer en vond dit ook voor hem een uitdaging. Is het mogelijk dat jij mij alles stuurt wat nodig is om te gaan printen. Zoals je waarschijnlijk gezien hebt, heb ik de kooi al van metaal maar het ontwerp van jou is mooier en waarschijnlijk weegt hij veel minder.
Groetjes, Erik
Ik heb vandaag uitgebreid over jouw (Stef Stuntpiloot) ontwerp gesproken. Een vriend van mij opperde toe om het ontwerp van de kooi die jij gemaakt ook voor mij te maken. Hij is in het bezit van een professionele 3D printer en vond dit ook voor hem een uitdaging. Is het mogelijk dat jij mij alles stuurt wat nodig is om te gaan printen. Zoals je waarschijnlijk gezien hebt, heb ik de kooi al van metaal maar het ontwerp van jou is mooier en waarschijnlijk weegt hij veel minder.
Groetjes, Erik
stef stuntpiloot
Forum veteraan
Zo, ik ben weer terug van vakantie dus kan weer verder met het project!

Als hij af is maak ik de modellen beschikbaar, hou er wel rekening mee overigens dat dit ding ontworpen is voor mijn 5.2 scherm. Ik las dat jij van plan bent een 3.0 te kopen, daar is hij niet geschikt voor
Als hij af is maak ik de modellen beschikbaar, hou er wel rekening mee overigens dat dit ding ontworpen is voor mijn 5.2 scherm. Ik las dat jij van plan bent een 3.0 te kopen, daar is hij niet geschikt voor
Laatst bewerkt:
stef stuntpiloot
Forum veteraan
Omdat het kan, nog even een test video die ik afgelopen week heb gemaakt met mn nieuwe GoPro Hero 6 en Karma grip, heel tevreden over de beeldkwaliteit!
Zo, ik ben weer terug van vakantie dus kan weer verder met het project!
Als hij af is maak ik de modellen beschikbaar, hou er wel rekening mee overigens dat dit ding ontworpen is voor mijn 5.2 scherm. Ik las dat jij van plan bent een 3.0 te kopen, daar is hij niet geschikt voor
Ja dat klopt. De Hybrid 3.0 is vier meter maar op de moter die ik ga gebruiken voor mijn trike mag een propeller van 18 inch. Dat is de reden dat ik naar het ontwerp van jouw 'kooi' gevraagd had en mocht de trike te zwaar zijn, zou ik nog over kunnen gaan naar de aanschaf van een grotere vleugel.