Zo, nu weer verder met de duiktank. Kwam even een projectje
https://www.modelbouwforum.nl/threads/autonoom-varend-bootje.272997/ , en vakantie tussendoor.
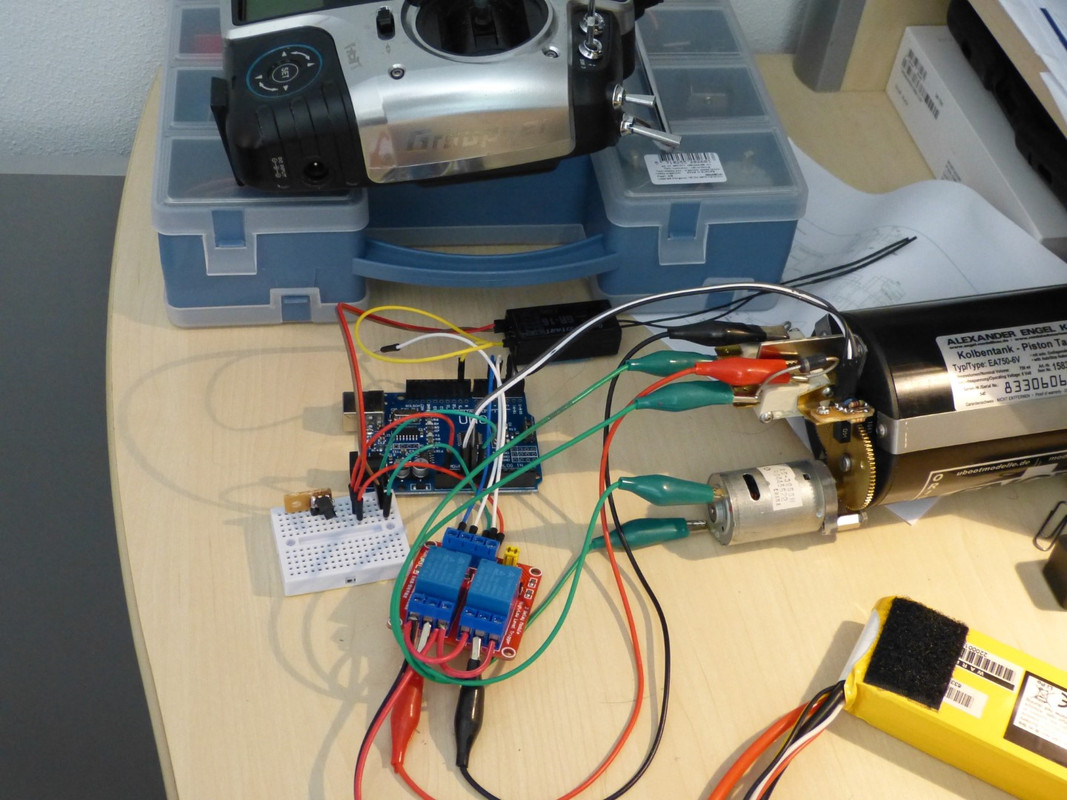
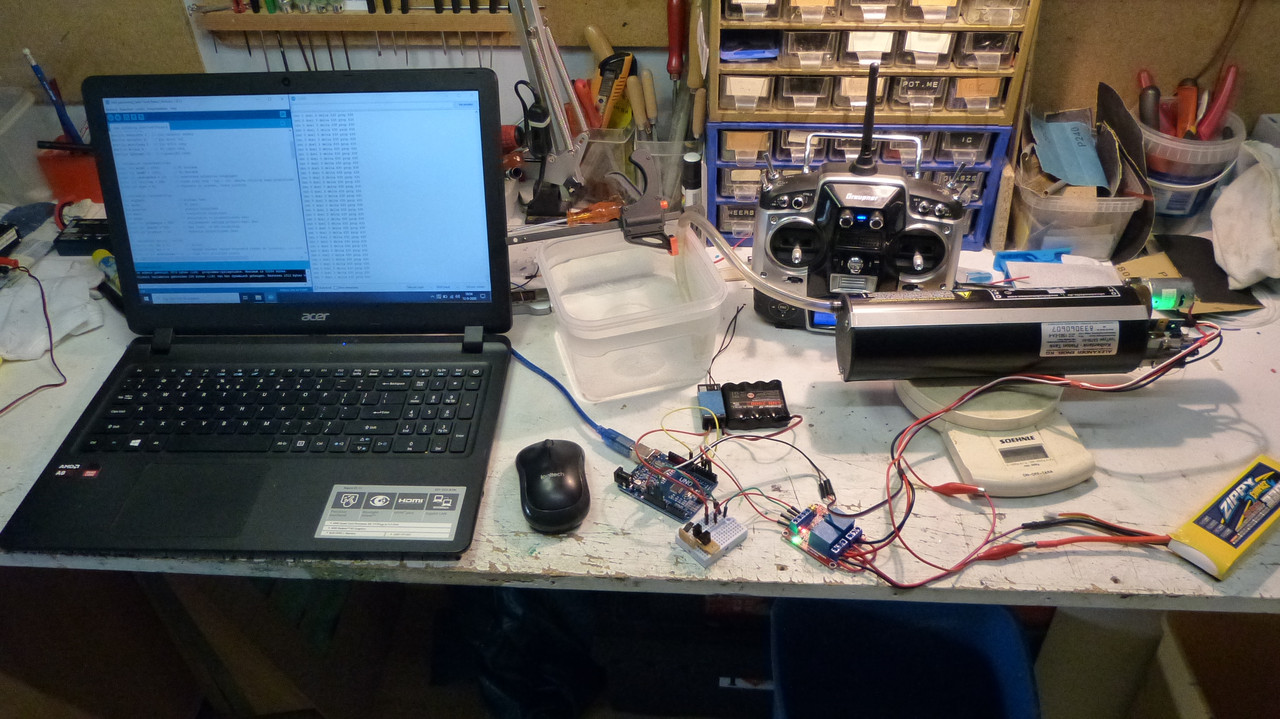
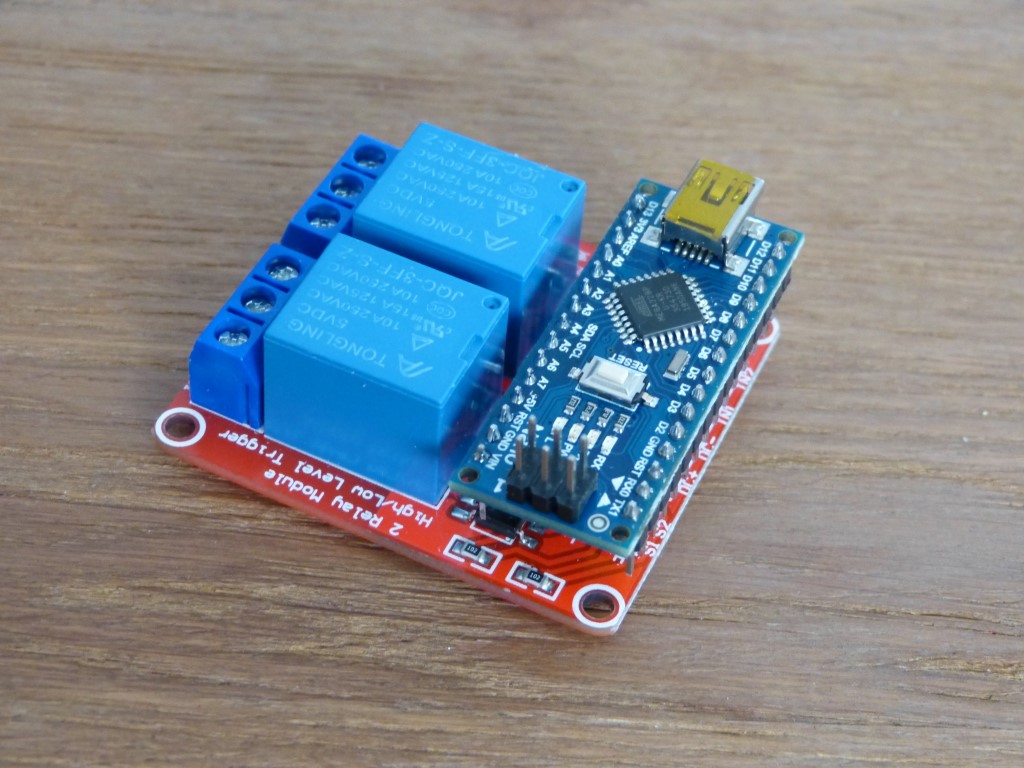
Ik heb nu ook getest met een H-brug voor de Arduino, met een L298N als motordriver. Dat werkt net zo goed als met relais, maar zoals met alles zijn er voor beide voor en nadelen:
Relais:
+ schakelt heel direct, aan is aan, en stop is stop. Daardoor nauwkeurig te positioneren.
+ schakelt de volle accuspanning naar de motor, dus de meeste kracht beschikbaar, geen warmteontwikkeling
+ met het snelle schakelen is ook de resolutie in het proportionele deel goed.
- met het directe aan-uit krijgt de motor op z'n donder.
- stroompieken zijn relatief hoog.
H-brug:
+ schakelt zachter aan en uit, prettiger voor de motor.
+ motortoerental is regelbaar
- zachter schakelen betekent een tragere start en stop, positionering is niet zo exact als met relais.
- minder vermogen naar motor, er is +- 2,5 volt spanningsval over de H-brug.
- daarmee ook warmteontwikkeling.
- motor toerentalregeling is niet zo nuttig, doordat de H-brug sowieso een lager motortoerental oplevert.
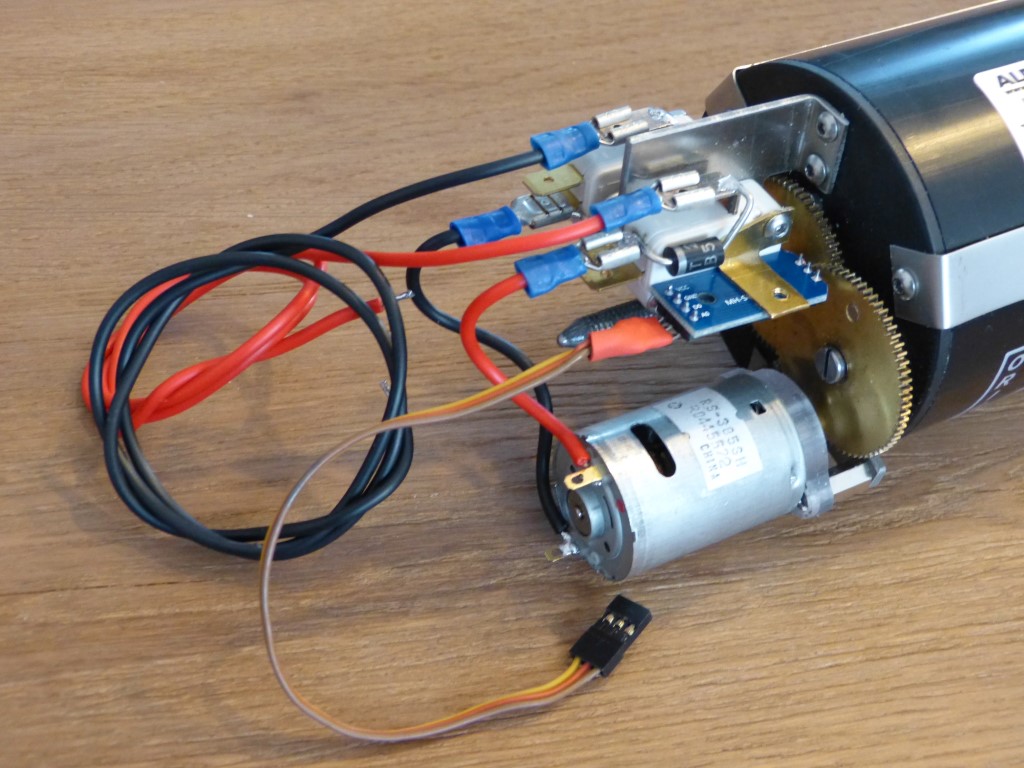
Met de H-brug en de relais is uiteindelijk zo goed als dezelfde resolutie haalbaar in het proportionele deel. De H-brug ijlt dan wat na, maar door het lagere toerental van de motor zijn de stapjes zo goed als gelijk. Dan is het dus een kwestie van afwegen. Persoonlijk lijken mij de relais in dit geval het beste. Voornamelijk doordat ze de volle accuspanning naar de motor sturen,. en je daarmee de meeste kracht hebt, en dus vanuit een grotere diepte de tank nog leeg kunt drukken. Je hebt dus meer reserve. Dat de motor meer op z'n donder krijgt neem ik dan voor lief, voordat die slecht wordt ben je weer een x aantal jaren verder. Engel stuurt tenslotte ook aan met relais.
Het volgende is een test met water in de tank, waarbij de resolutie het beste gefinetuned kan worden. Ook wil ik kijken hoe een 100cc proportioneel deel werkt ten opzichte van zeg een 50cc deel. 'Droog' heb ik nu een resolutie van rond 1,5mm zuigerslag.
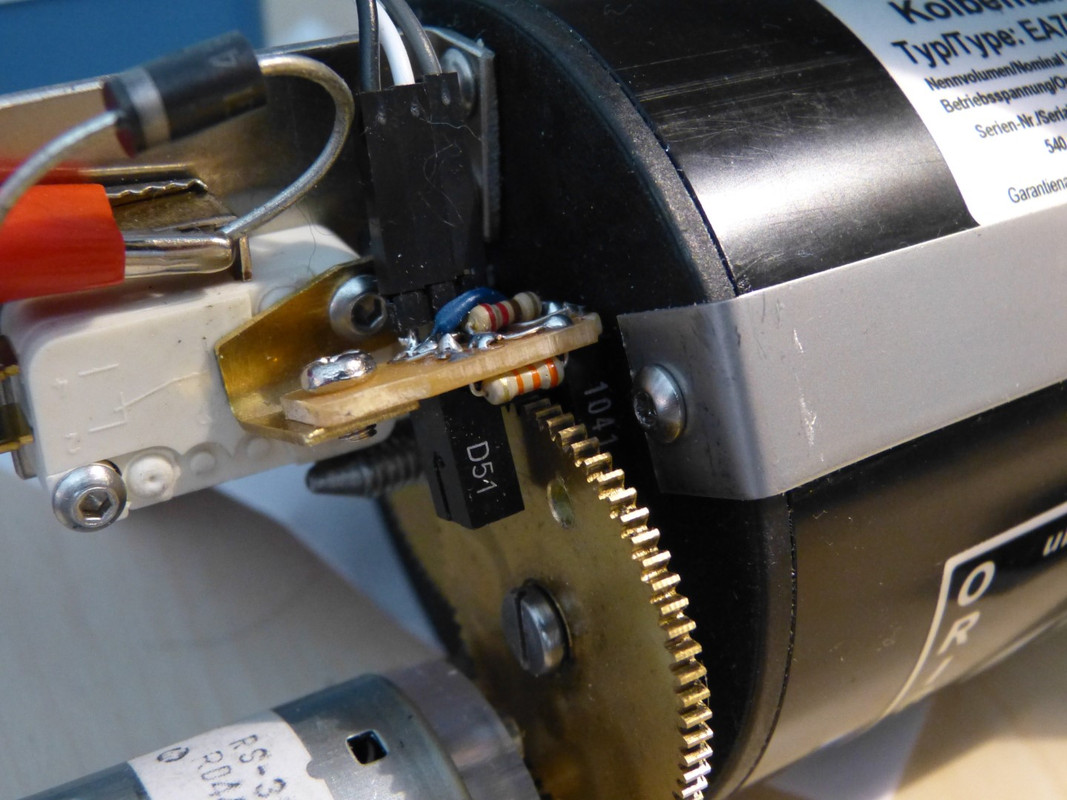
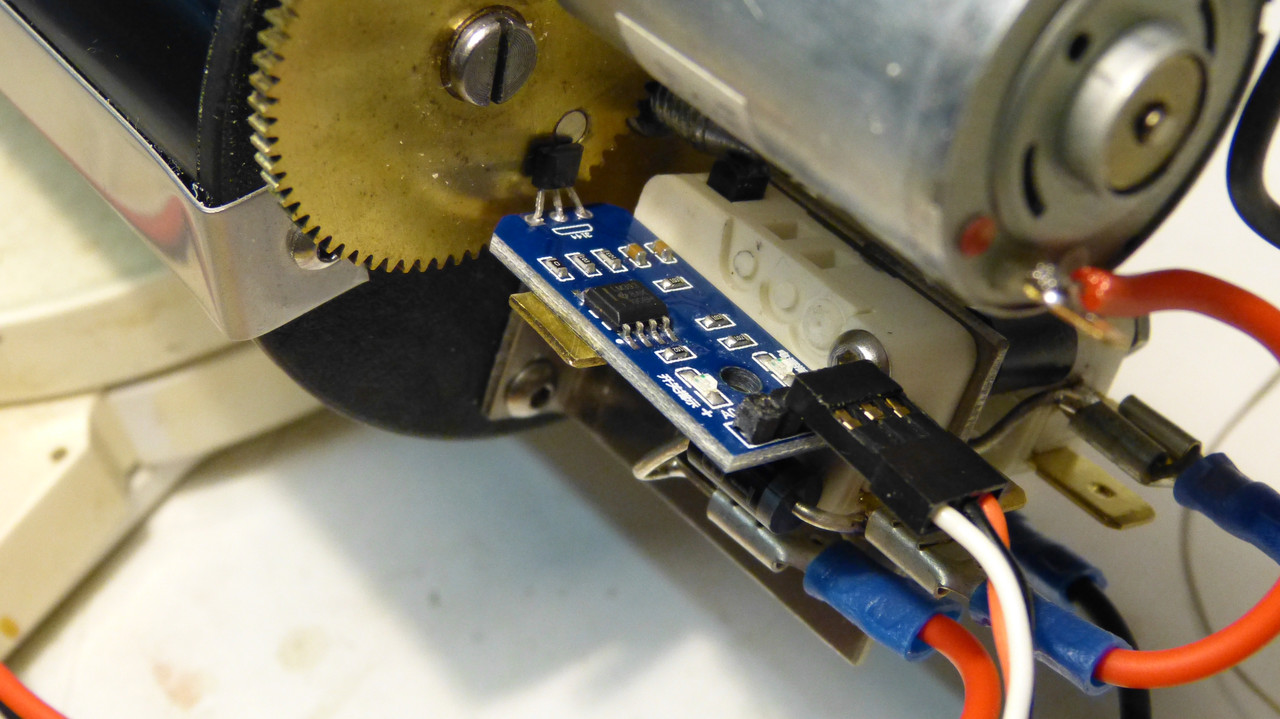
O ja, en de magneet moet er weer in, is nu nog de infrarood sensor ..
")